
用于垂直与斜列泊车路径规划方法、系统、存储介质及车辆.pdf

瀚玥****魔王

1/10

2/10
3/10
4/10
5/10

6/10
7/10
8/10

9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
用于垂直与斜列泊车路径规划方法、系统、存储介质及车辆.pdf
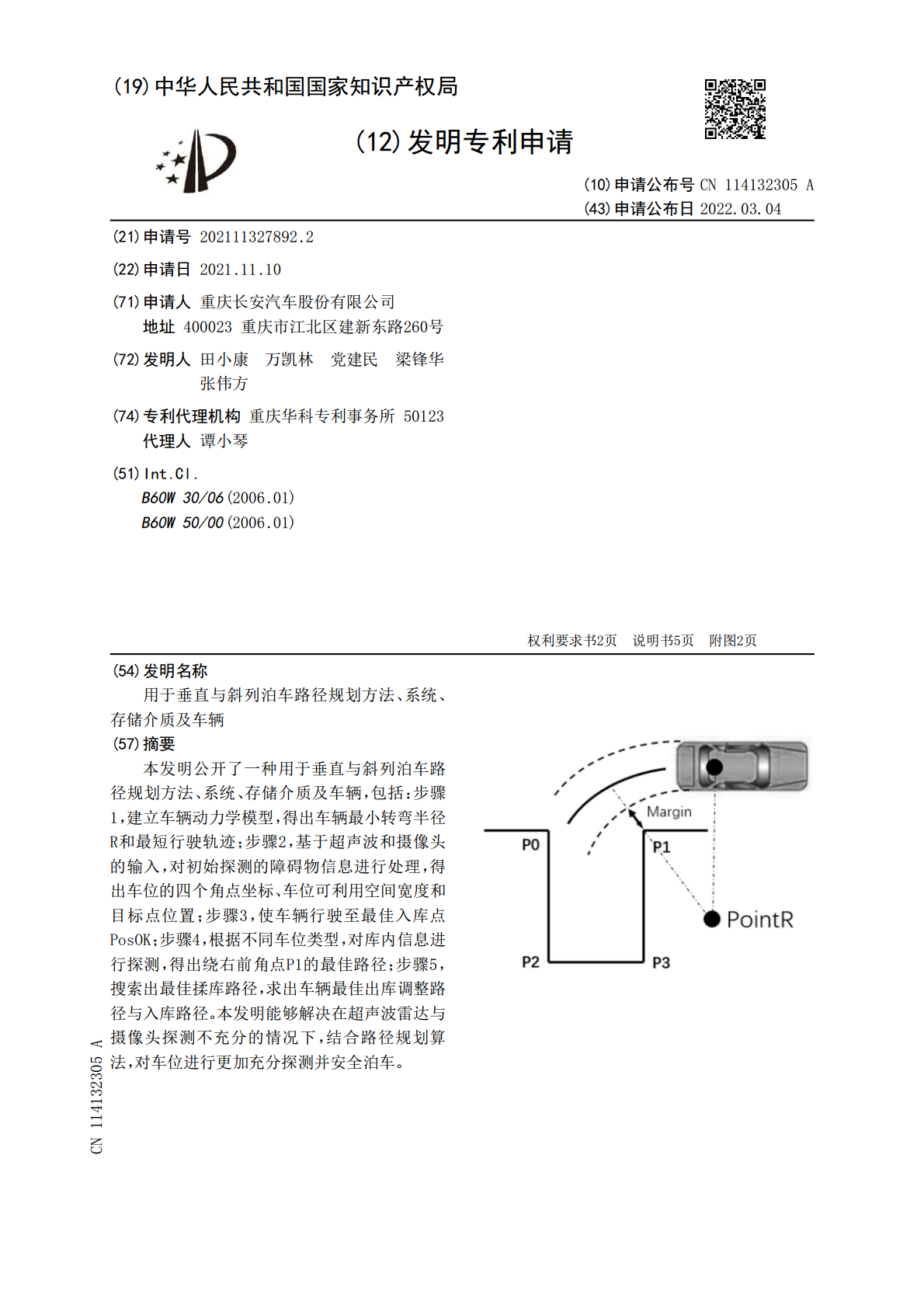
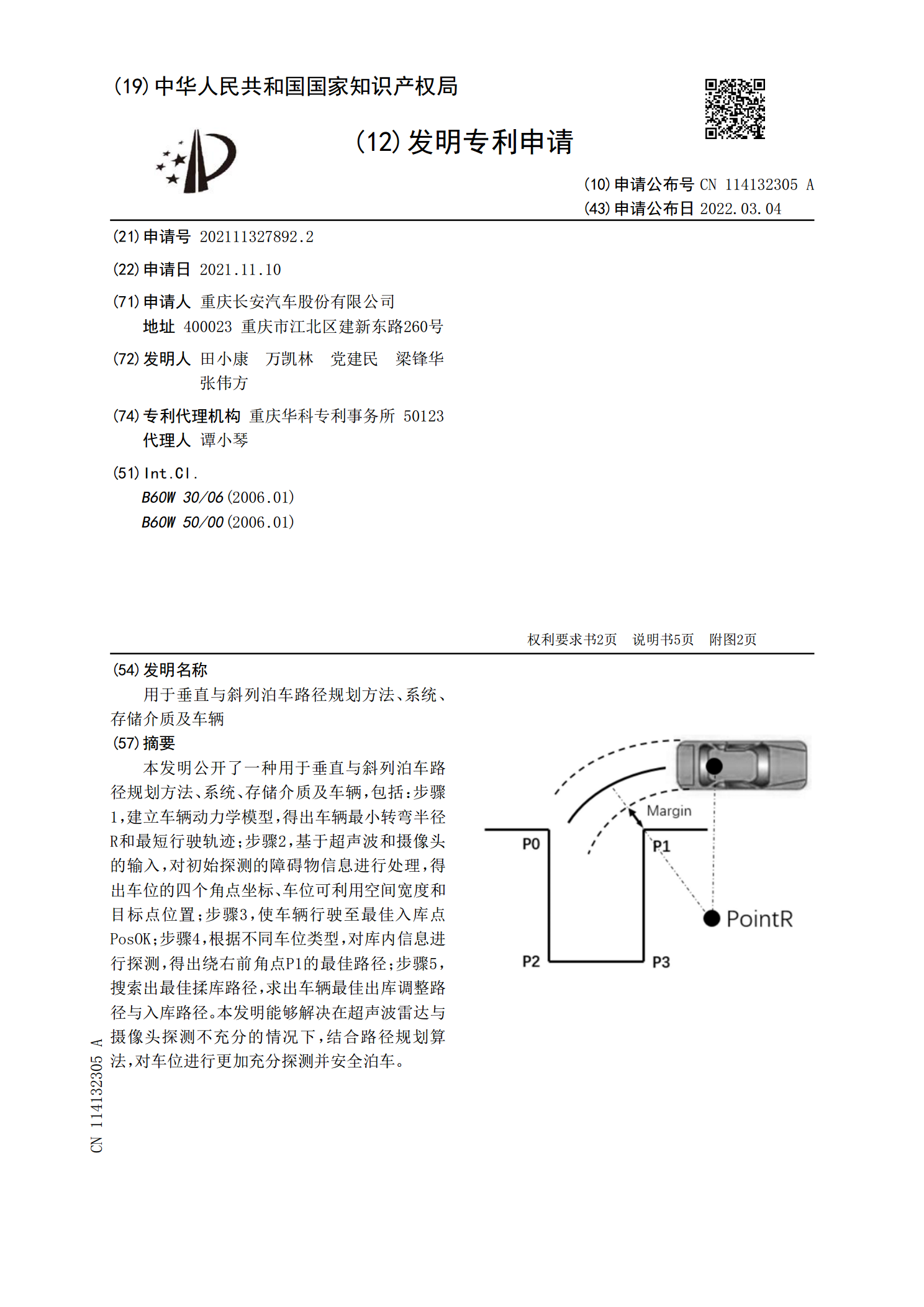
本发明公开了一种用于垂直与斜列泊车路径规划方法、系统、存储介质及车辆,包括:步骤1,建立车辆动力学模型,得出车辆最小转弯半径R和最短行驶轨迹;步骤2,基于超声波和摄像头的输入,对初始探测的障碍物信息进行处理,得出车位的四个角点坐标、车位可利用空间宽度和目标点位置;步骤3,使车辆行驶至最佳入库点PosOK;步骤4,根据不同车位类型,对库内信息进行探测,得出绕右前角点P1的最佳路径;步骤5,搜索出最佳揉库路径,求出车辆最佳出库调整路径与入库路径。本发明能够解决在超声波雷达与摄像头探测不充分的情况下,结合路径规
泊车路径规划方法、泊车路径规划装置、车辆及存储介质.pdf
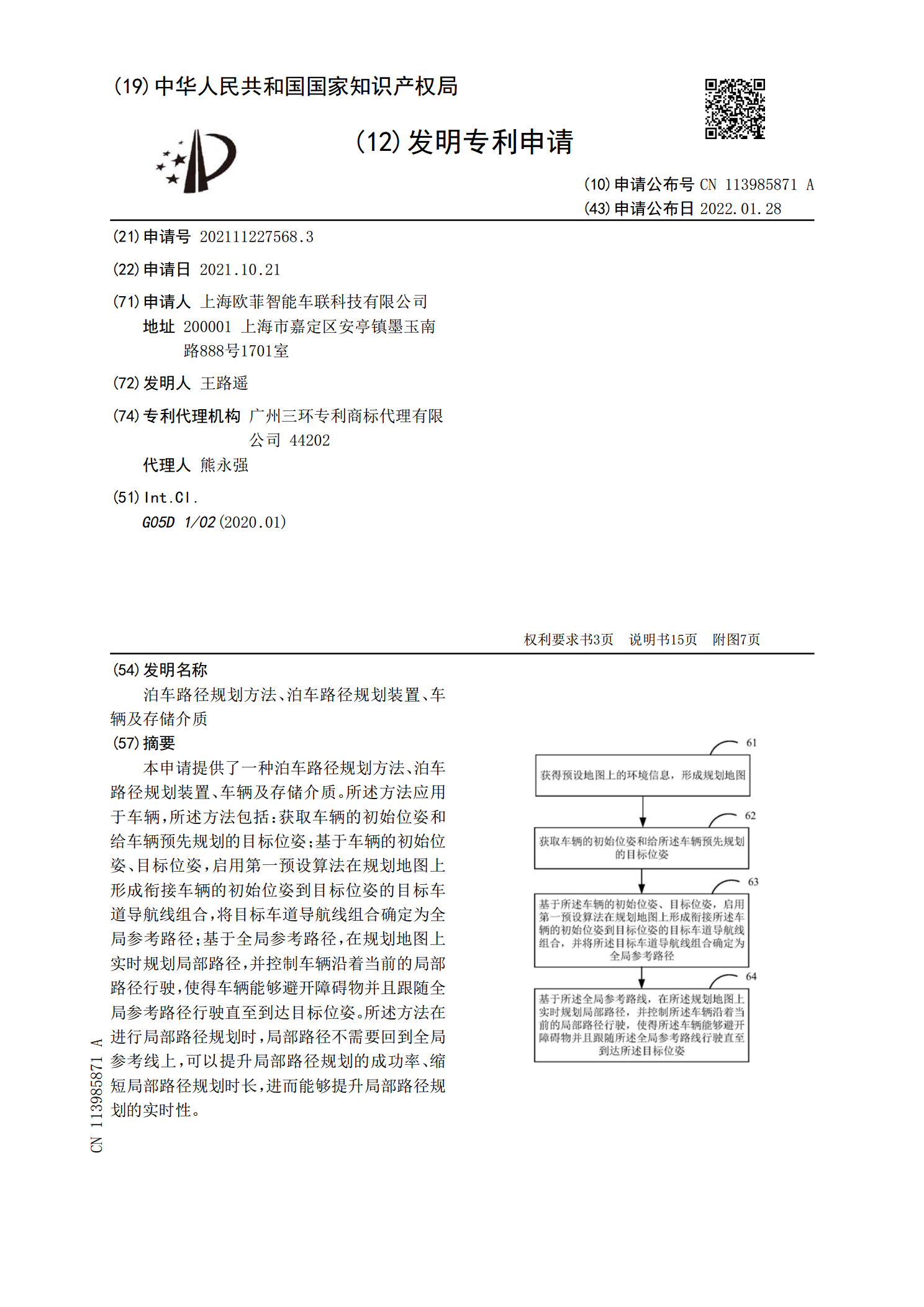
本申请提供了一种泊车路径规划方法、泊车路径规划装置、车辆及存储介质。所述方法应用于车辆,所述方法包括:获取车辆的初始位姿和给车辆预先规划的目标位姿;基于车辆的初始位姿、目标位姿,启用第一预设算法在规划地图上形成衔接车辆的初始位姿到目标位姿的目标车道导航线组合,将目标车道导航线组合确定为全局参考路径;基于全局参考路径,在规划地图上实时规划局部路径,并控制车辆沿着当前的局部路径行驶,使得车辆能够避开障碍物并且跟随全局参考路径行驶直至到达目标位姿。所述方法在进行局部路径规划时,局部路径不需要回到全局参考线上,可
泊车方法、系统、可读存储介质及车辆.pdf
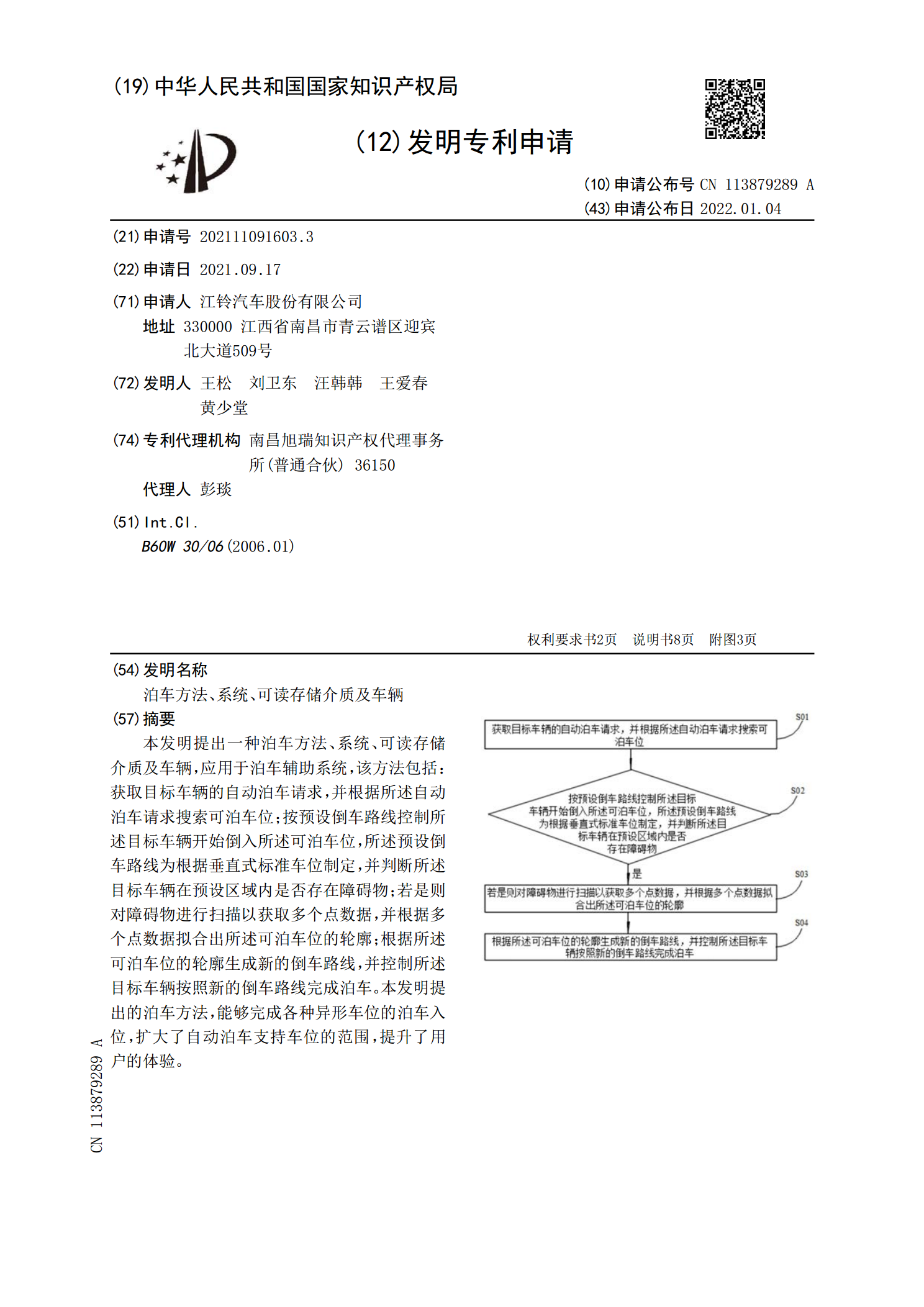
本发明提出一种泊车方法、系统、可读存储介质及车辆,应用于泊车辅助系统,该方法包括:获取目标车辆的自动泊车请求,并根据所述自动泊车请求搜索可泊车位;按预设倒车路线控制所述目标车辆开始倒入所述可泊车位,所述预设倒车路线为根据垂直式标准车位制定,并判断所述目标车辆在预设区域内是否存在障碍物;若是则对障碍物进行扫描以获取多个点数据,并根据多个点数据拟合出所述可泊车位的轮廓;根据所述可泊车位的轮廓生成新的倒车路线,并控制所述目标车辆按照新的倒车路线完成泊车。本发明提出的泊车方法,能够完成各种异形车位的泊车入位,扩大

语音控制泊车的系统、方法、车辆及存储介质.pdf
本发明公开了一种语音控制泊车的系统、方法、车辆及存储介质,包括车内麦克风、车外麦克风模块、车机、车外语音离线模组、APA自动泊车模块、智能钥匙和域控制器;其中,所述车内麦克风、车机和APA自动泊车模块组成车内语音泊车控制子系统;所述车外麦克风模块、车外语音离线模组、车机和APA自动泊车模块组成车外语音泊车控制子系统;所述车内麦克风设置在车内,该车内麦克风与车机连接;所述车外麦克风模块设置在车外;所述域控制器与车机连接;所述车外语音离线模组分别与车外麦克风模块和车机连接;所述APA自动泊车模块分别与车机和泊
自动泊车路径规划方法、装置、设备及可读存储介质.pdf
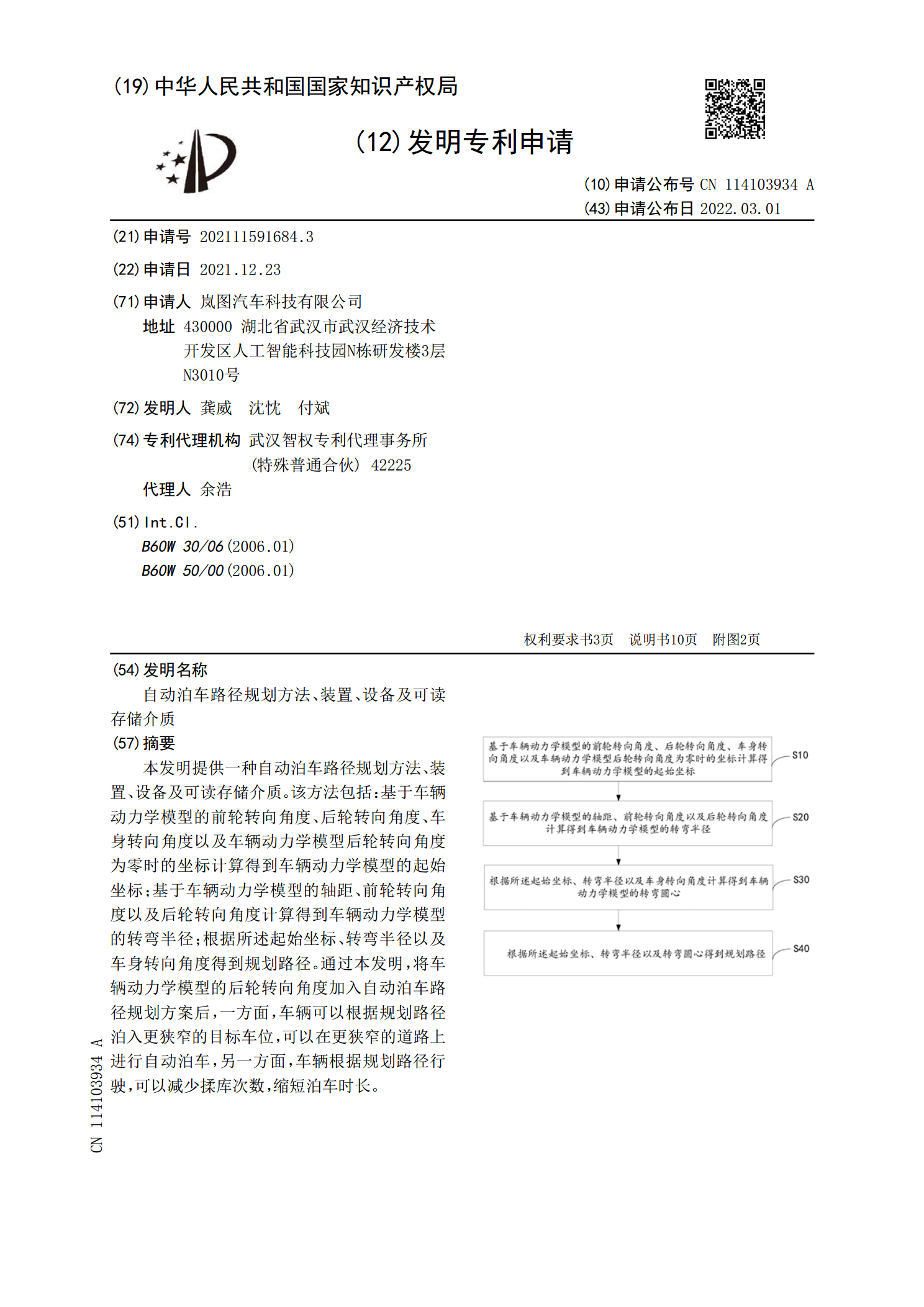
本发明提供一种自动泊车路径规划方法、装置、设备及可读存储介质。该方法包括:基于车辆动力学模型的前轮转向角度、后轮转向角度、车身转向角度以及车辆动力学模型后轮转向角度为零时的坐标计算得到车辆动力学模型的起始坐标;基于车辆动力学模型的轴距、前轮转向角度以及后轮转向角度计算得到车辆动力学模型的转弯半径;根据所述起始坐标、转弯半径以及车身转向角度得到规划路径。通过本发明,将车辆动力学模型的后轮转向角度加入自动泊车路径规划方案后,一方面,车辆可以根据规划路径泊入更狭窄的目标车位,可以在更狭窄的道路上进行自动泊车,另