
图像深度信息的确定方法、装置、电子设备和存储介质.pdf

听容****55


1/10

2/10

3/10

4/10
5/10
6/10
7/10
8/10
9/10

10/10
亲,该文档总共25页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
图像深度信息的确定方法、装置、电子设备和存储介质.pdf
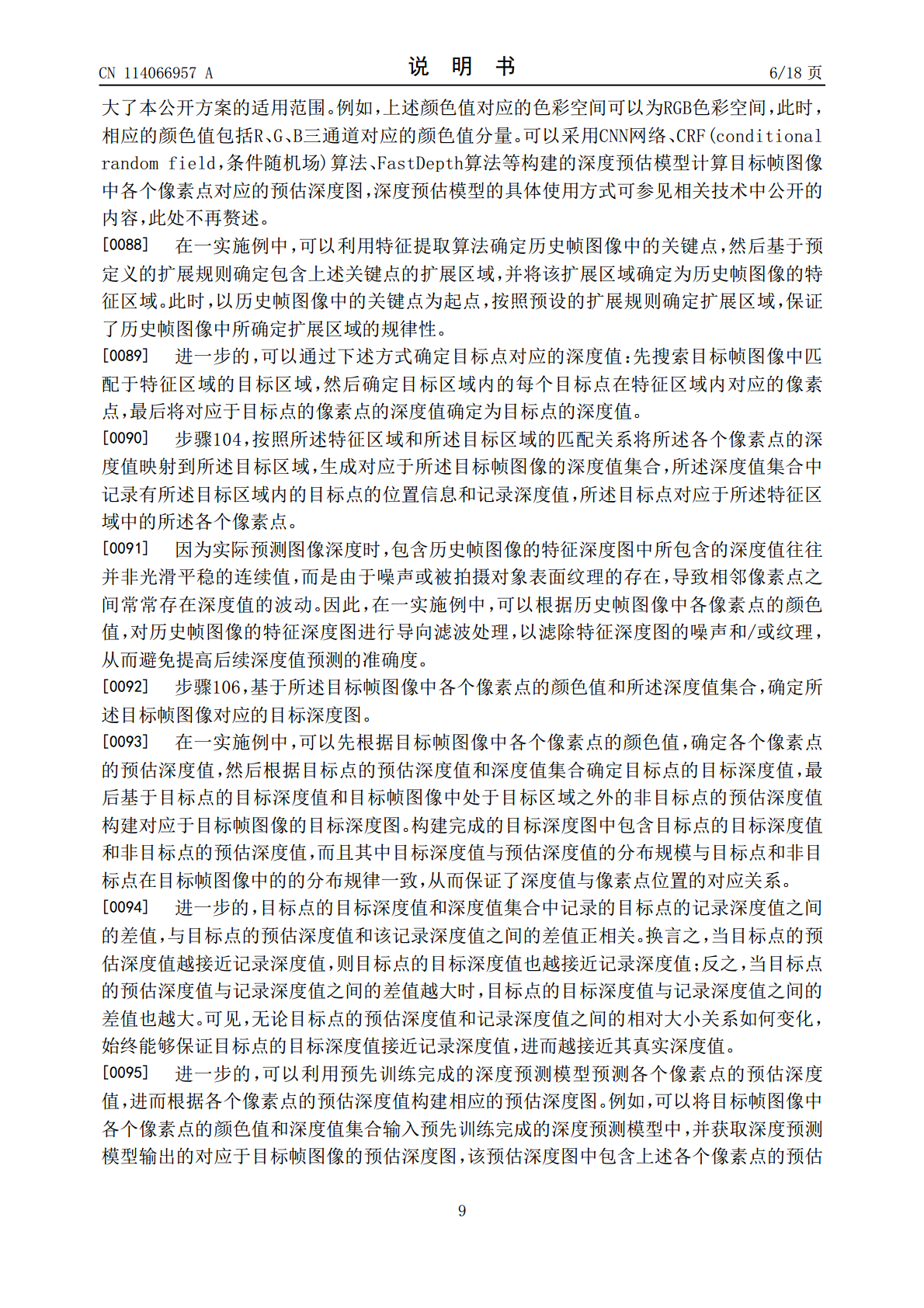
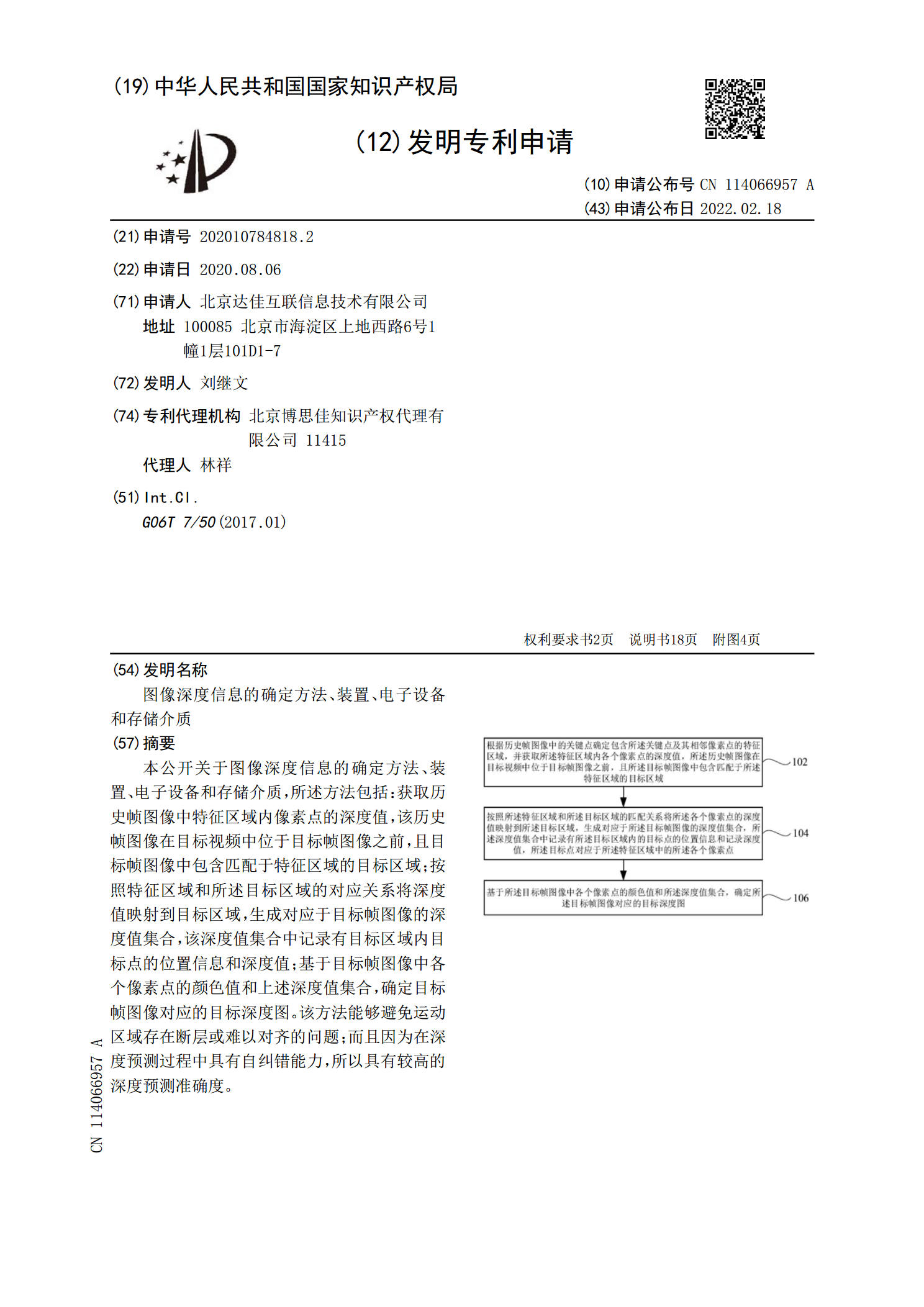
本公开关于图像深度信息的确定方法、装置、电子设备和存储介质,所述方法包括:获取历史帧图像中特征区域内像素点的深度值,该历史帧图像在目标视频中位于目标帧图像之前,且目标帧图像中包含匹配于特征区域的目标区域;按照特征区域和所述目标区域的对应关系将深度值映射到目标区域,生成对应于目标帧图像的深度值集合,该深度值集合中记录有目标区域内目标点的位置信息和深度值;基于目标帧图像中各个像素点的颜色值和上述深度值集合,确定目标帧图像对应的目标深度图。该方法能够避免运动区域存在断层或难以对齐的问题;而且因为在深度预测过程中

深度信息确定方法、装置及存储介质.pdf
本申请公开了一种深度信息确定方法、装置及存储介质,其中,该方法包括:通过获取初始场景的场景图片;利用至少一个拍摄装置对目标场景进行拍摄,得到目标场景的第一场景图片;在初始场景的场景图片与目标场景的第一场景图片之间存在预设的第一类别变化的情况下,确定目标场景中存在预设类型的物体;基于目标场景中预设类型的物体确定目标场景对应的深度参数;基于目标场景对应的深度参数确定目标场景中至少一个物体的深度信息。由此,本申请实施例可以对不同场景中可能存在的影响探测物体的深度信息的准确性的深度参数进行调节,以提高探测到的深度

环境光信息确定方法、装置、电子设备和存储介质.pdf
本公开关于环境光信息确定方法、装置、电子设备和存储介质,方法包括:在三维人脸图像中确定多个采样点;确定采样点的方向信息和采样点的实际颜色的颜色值与采样点的样本颜色的颜色值的比值;根据三维人脸图像中的环境光沿每个方向分量的颜色值与比值构建球谐光照模型方程;根据多个采样点对应的球谐光照模型方程构成的方程组,计算环境光沿每个方向分量的颜色值。根据本公开的实施例,得到的环境光沿每个方向分量的颜色值不仅可以表示环境光中各个颜色的分量,还可以表示环境光在每个方向的颜色分量,从而包含了光照的颜色值和照射方向信息。根据该

异常信息的确定方法、装置、电子设备和存储介质.pdf
本发明公开了异常信息的确定方法、装置、电子设备和存储介质,涉及计算机技术领域。该方法的一具体实施方式包括:当页面的页面操作被触发时,根据页面操作对应的页面内容,确定页面操作对应的操作图片和操作图片的属性信息,并存储操作图片和操作图片的属性信息;当页面发生页面异常时,根据存储的操作图片和操作图片的属性信息,确定页面信息集合,页面信息包括操作图片集合和属性信息集合;向服务端发送页面信息集合。该实施方式能够解决不能准确的确定异常信息,从而给定位页面异常带来困难,降低页面异常的处理效率的问题。

情感信息的确定方法、确定装置、电子设备和存储介质.pdf
本申请公开了一种情感信息的确定方法、确定装置、电子设备和存储介质,属于电子设备技术领域,其中,情感信息的确定方法,应用于电子设备,电子设备包括电磁波吸收比值传感器和无线电收发机,无线电收发机与电磁波吸收比值传感器相连接,方法包括:通过电磁波吸收比值传感器,检测人体握持信号;在检测到人体握持信号的情况下,通过无线电收发机确定对应的品质因数;根据品质因数,确定人体的电参数变化量;根据电参数变化量,确定用户的情感信息。