
机器人标定方法及装置.pdf

琰琬****买买

1/10

2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
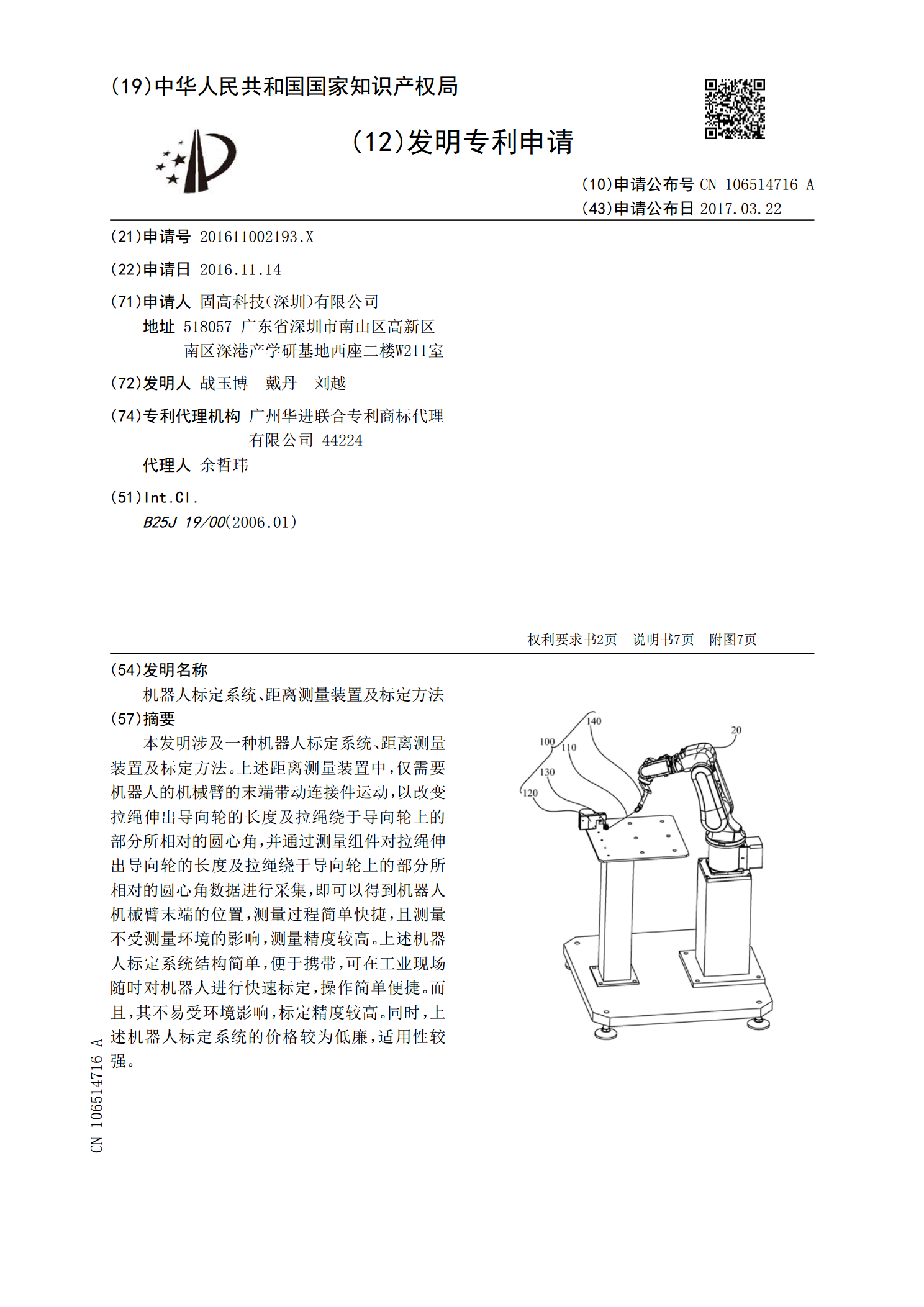
机器人标定系统、距离测量装置及标定方法.pdf
本发明涉及一种机器人标定系统、距离测量装置及标定方法。上述距离测量装置中,仅需要机器人的机械臂的末端带动连接件运动,以改变拉绳伸出导向轮的长度及拉绳绕于导向轮上的部分所相对的圆心角,并通过测量组件对拉绳伸出导向轮的长度及拉绳绕于导向轮上的部分所相对的圆心角数据进行采集,即可以得到机器人机械臂末端的位置,测量过程简单快捷,且测量不受测量环境的影响,测量精度较高。上述机器人标定系统结构简单,便于携带,可在工业现场随时对机器人进行快速标定,操作简单便捷。而且,其不易受环境影响,标定精度较高。同时,上述机器人标定
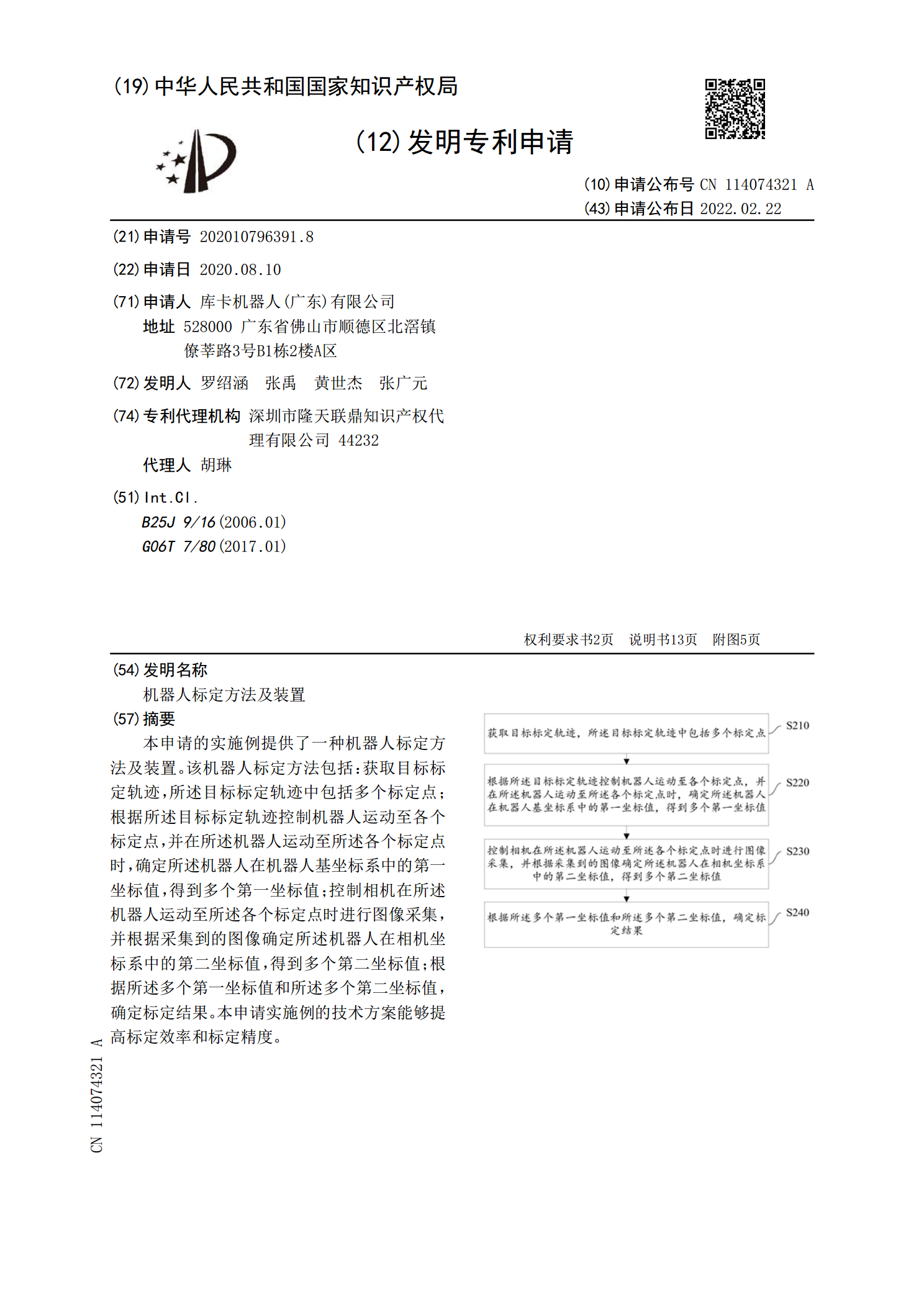
机器人标定方法及装置.pdf
本申请的实施例提供了一种机器人标定方法及装置。该机器人标定方法包括:获取目标标定轨迹,所述目标标定轨迹中包括多个标定点;根据所述目标标定轨迹控制机器人运动至各个标定点,并在所述机器人运动至所述各个标定点时,确定所述机器人在机器人基坐标系中的第一坐标值,得到多个第一坐标值;控制相机在所述机器人运动至所述各个标定点时进行图像采集,并根据采集到的图像确定所述机器人在相机坐标系中的第二坐标值,得到多个第二坐标值;根据所述多个第一坐标值和所述多个第二坐标值,确定标定结果。本申请实施例的技术方案能够提高标定效率和标定
机器人足目标定方法和标定装置.pdf
(19)中华人民共和国国家知识产权局(12)发明专利说明书(10)申请公布号CN101096101A(43)申请公布日2008.01.02(21)申请号CN200610086639.1(22)申请日2006.06.26(71)申请人北京航空航天大学地址100083北京市海淀区学院路37号(72)发明人张广军李秀智魏振忠周富强(74)专利代理机构中国航空专利中心代理人梁瑞林(51)Int.CIB25J9/16B25J13/00权利要求说明书说明书幅图(54)发明名称机器人足目标定方法和标定装置(57)摘要本

机器人标定方法、装置以及系统.pdf
本发明涉及了一种机器人标定方法、装置以及系统,机器人标定方法包括:在标定杆移动到标定板上第一标定点时,获取第一标定点在机器人坐标系下的第一坐标,并且获取标定部相对于机器人坐标系的旋转角度;标定板上各标定点分别沿横向方向和纵向方向排列,横向方向垂直于纵向方向;旋转角度为固定在标定杆上的支杆从第一标定点沿横向方向或纵向方向指向任一标定点时相对于机器人坐标系下的横轴或纵轴的角度;根据第一坐标、各标定点之间的间距、位置关系以及旋转角度,得到其他标定点在机器人坐标系下的第二坐标。本发明简化了机器人标定点的操作过程,
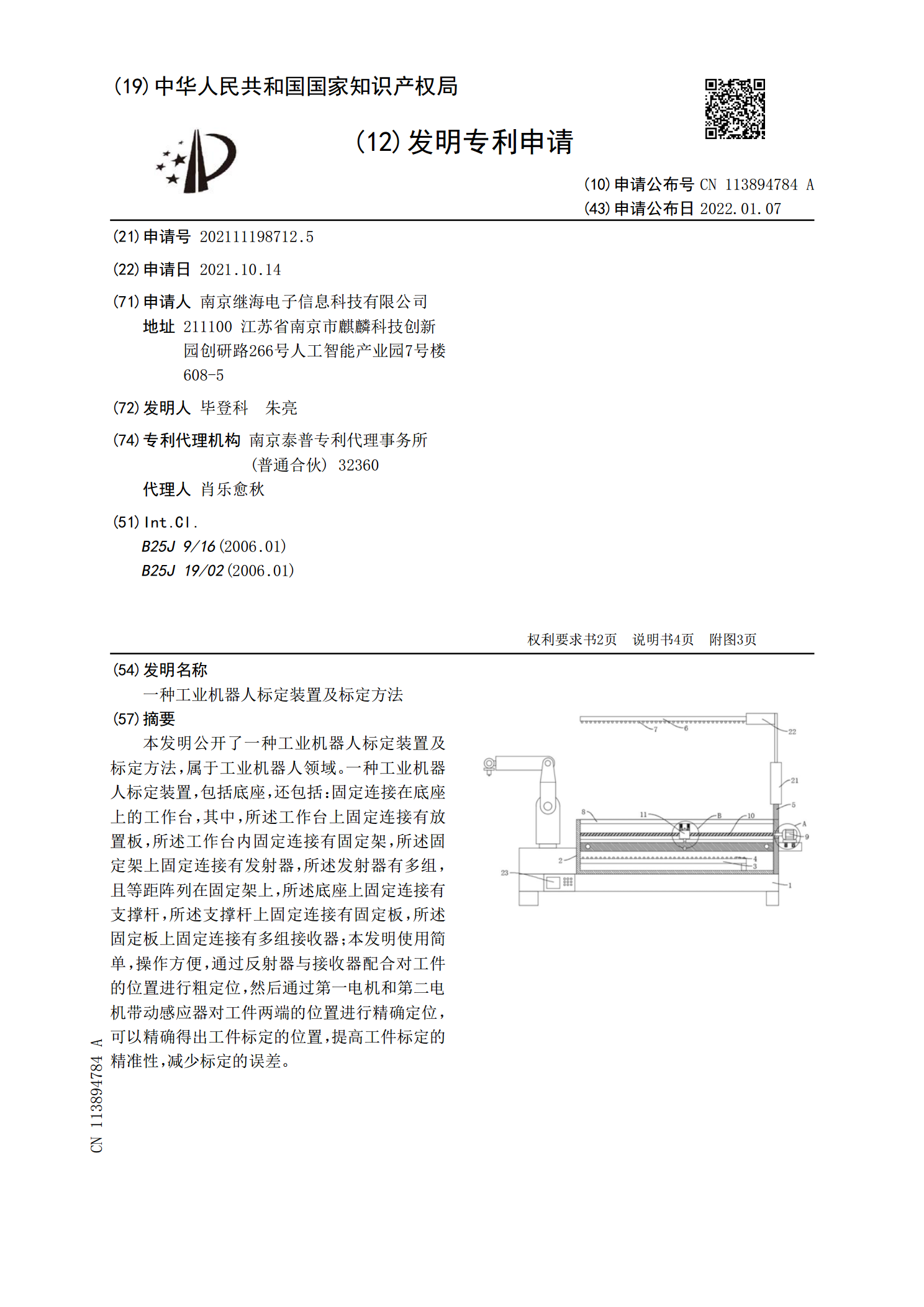
一种工业机器人标定装置及标定方法.pdf
本发明公开了一种工业机器人标定装置及标定方法,属于工业机器人领域。一种工业机器人标定装置,包括底座,还包括:固定连接在底座上的工作台,其中,所述工作台上固定连接有放置板,所述工作台内固定连接有固定架,所述固定架上固定连接有发射器,所述发射器有多组,且等距阵列在固定架上,所述底座上固定连接有支撑杆,所述支撑杆上固定连接有固定板,所述固定板上固定连接有多组接收器;本发明使用简单,操作方便,通过反射器与接收器配合对工件的位置进行粗定位,然后通过第一电机和第二电机带动感应器对工件两端的位置进行精确定位,可以精确得