
超速检测方法、装置、视觉传感器和存储介质.pdf

沛芹****ng

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
超速检测方法、装置、视觉传感器和存储介质.pdf
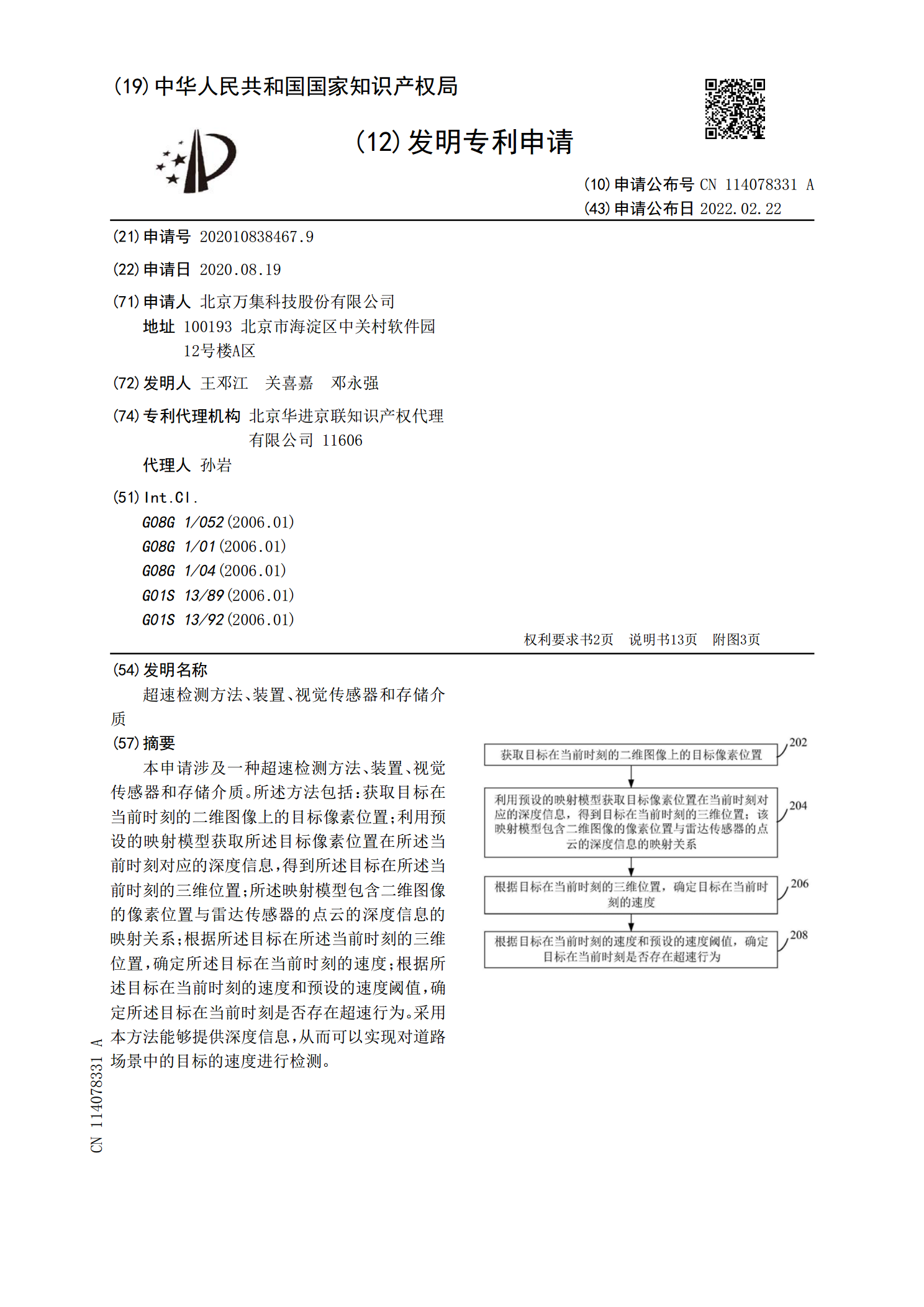
本申请涉及一种超速检测方法、装置、视觉传感器和存储介质。所述方法包括:获取目标在当前时刻的二维图像上的目标像素位置;利用预设的映射模型获取所述目标像素位置在所述当前时刻对应的深度信息,得到所述目标在所述当前时刻的三维位置;所述映射模型包含二维图像的像素位置与雷达传感器的点云的深度信息的映射关系;根据所述目标在所述当前时刻的三维位置,确定所述目标在当前时刻的速度;根据所述目标在当前时刻的速度和预设的速度阈值,确定所述目标在当前时刻是否存在超速行为。采用本方法能够提供深度信息,从而可以实现对道路场景中的目标的
碰撞检测方法、装置、视觉传感器和存储介质.pdf
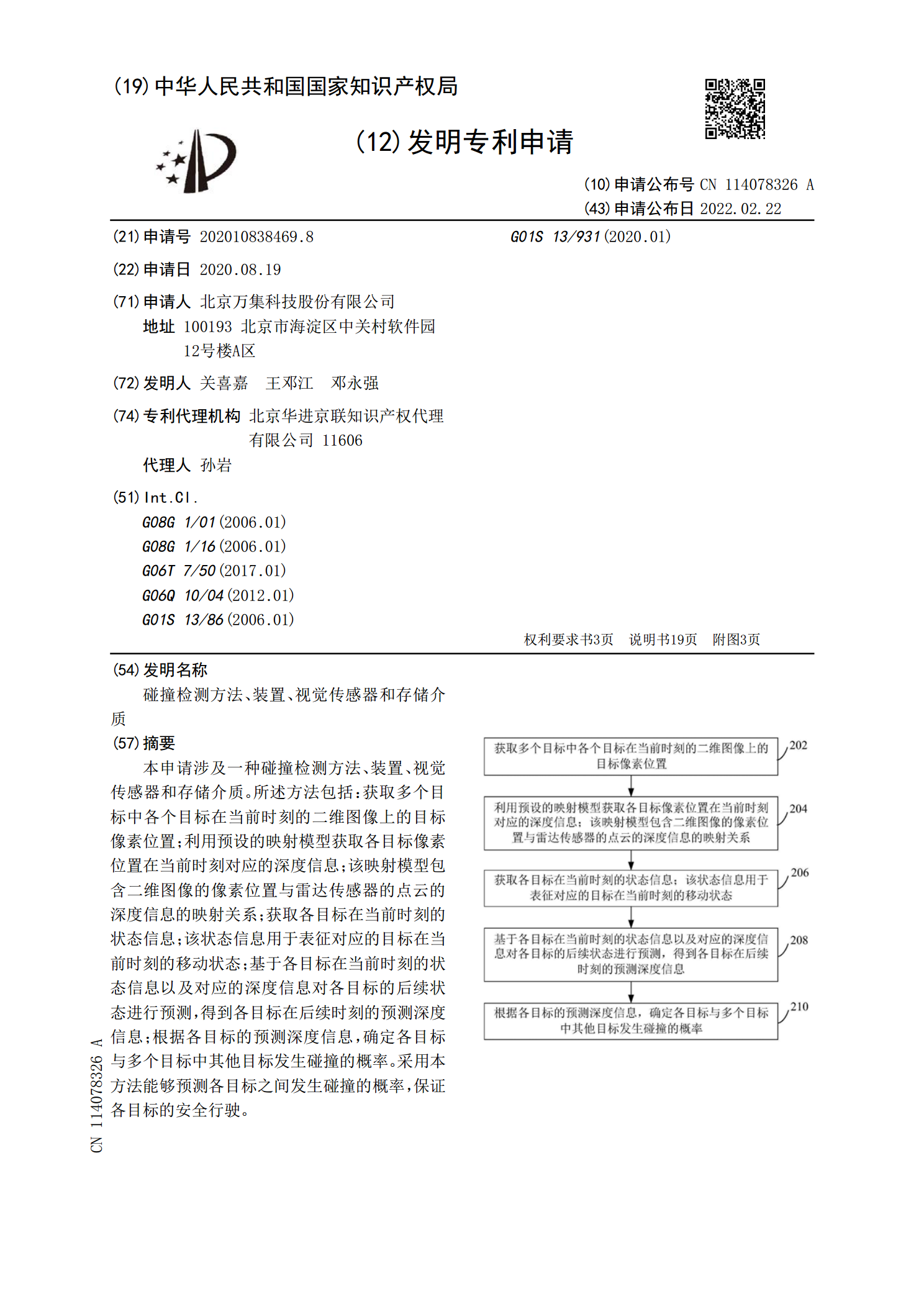
本申请涉及一种碰撞检测方法、装置、视觉传感器和存储介质。所述方法包括:获取多个目标中各个目标在当前时刻的二维图像上的目标像素位置;利用预设的映射模型获取各目标像素位置在当前时刻对应的深度信息;该映射模型包含二维图像的像素位置与雷达传感器的点云的深度信息的映射关系;获取各目标在当前时刻的状态信息;该状态信息用于表征对应的目标在当前时刻的移动状态;基于各目标在当前时刻的状态信息以及对应的深度信息对各目标的后续状态进行预测,得到各目标在后续时刻的预测深度信息;根据各目标的预测深度信息,确定各目标与多个目标中其他
目标检测方法、跟踪方法、装置、视觉传感器和介质.pdf
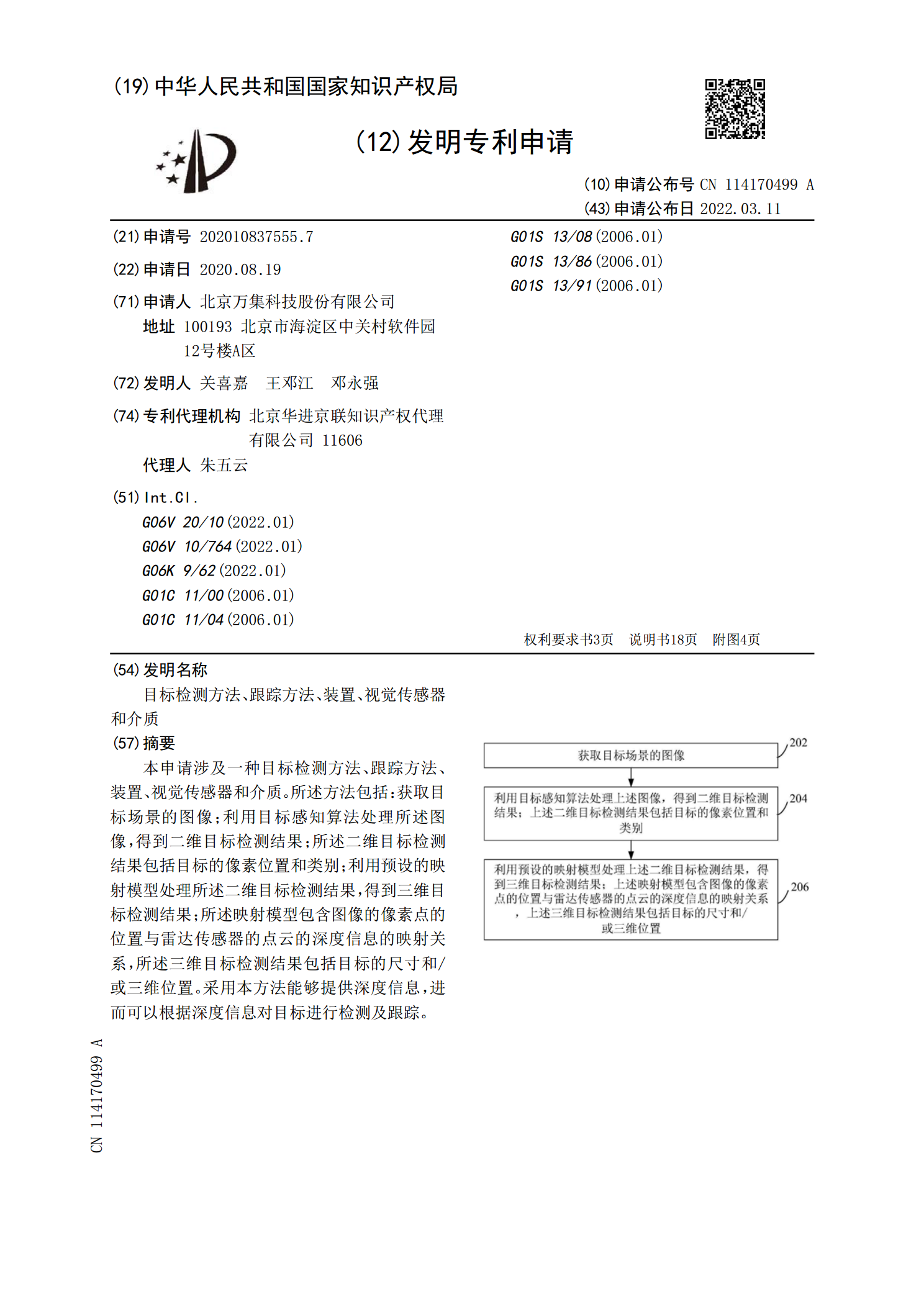
本申请涉及一种目标检测方法、跟踪方法、装置、视觉传感器和介质。所述方法包括:获取目标场景的图像;利用目标感知算法处理所述图像,得到二维目标检测结果;所述二维目标检测结果包括目标的像素位置和类别;利用预设的映射模型处理所述二维目标检测结果,得到三维目标检测结果;所述映射模型包含图像的像素点的位置与雷达传感器的点云的深度信息的映射关系,所述三维目标检测结果包括目标的尺寸和/或三维位置。采用本方法能够提供深度信息,进而可以根据深度信息对目标进行检测及跟踪。
超速提示方法、装置、存储介质以及终端.pdf
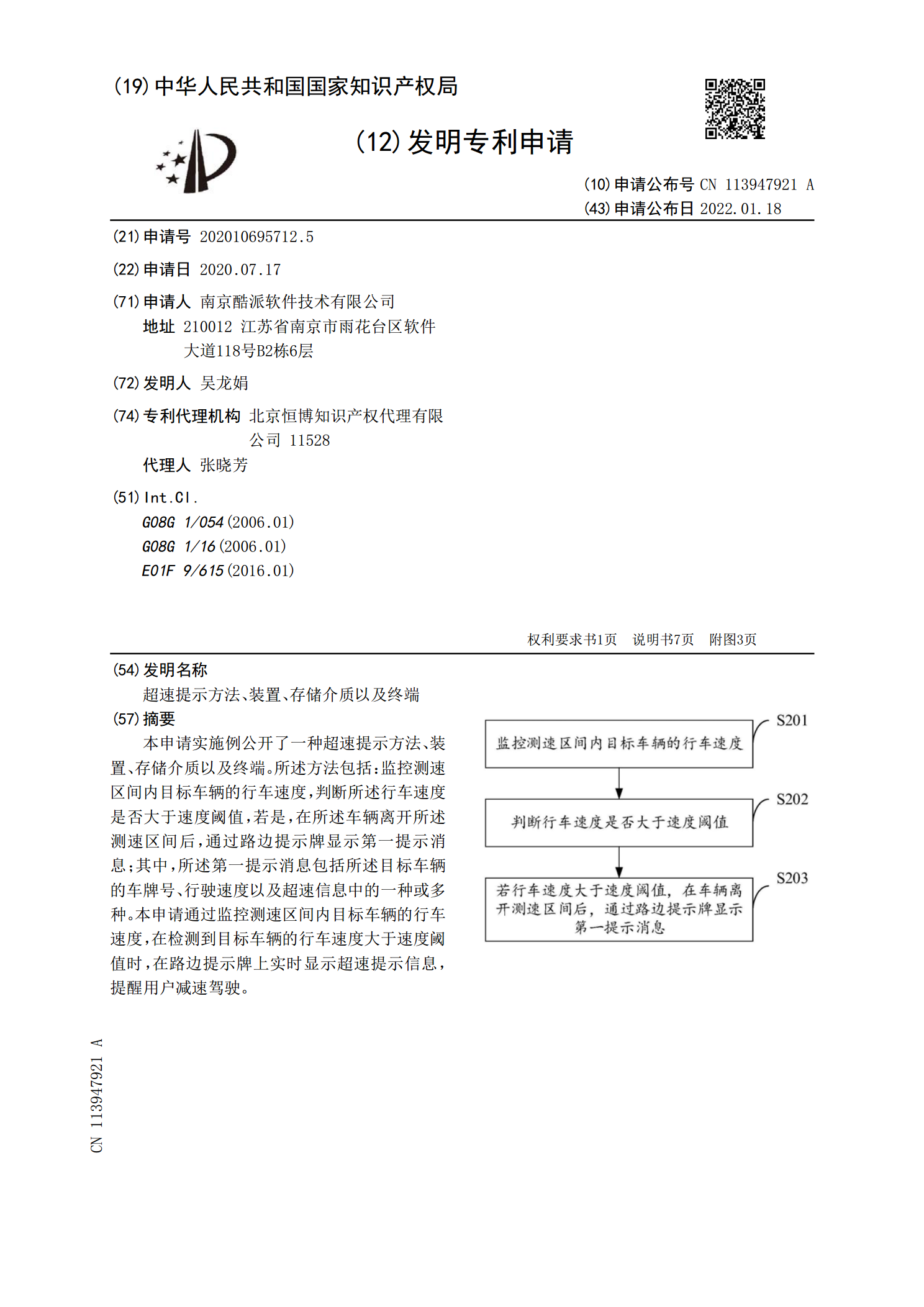
本申请实施例公开了一种超速提示方法、装置、存储介质以及终端。所述方法包括:监控测速区间内目标车辆的行车速度,判断所述行车速度是否大于速度阈值,若是,在所述车辆离开所述测速区间后,通过路边提示牌显示第一提示消息;其中,所述第一提示消息包括所述目标车辆的车牌号、行驶速度以及超速信息中的一种或多种。本申请通过监控测速区间内目标车辆的行车速度,在检测到目标车辆的行车速度大于速度阈值时,在路边提示牌上实时显示超速提示信息,提醒用户减速驾驶。
基于机器视觉的缺陷检测方法、装置、终端及存储介质.pdf
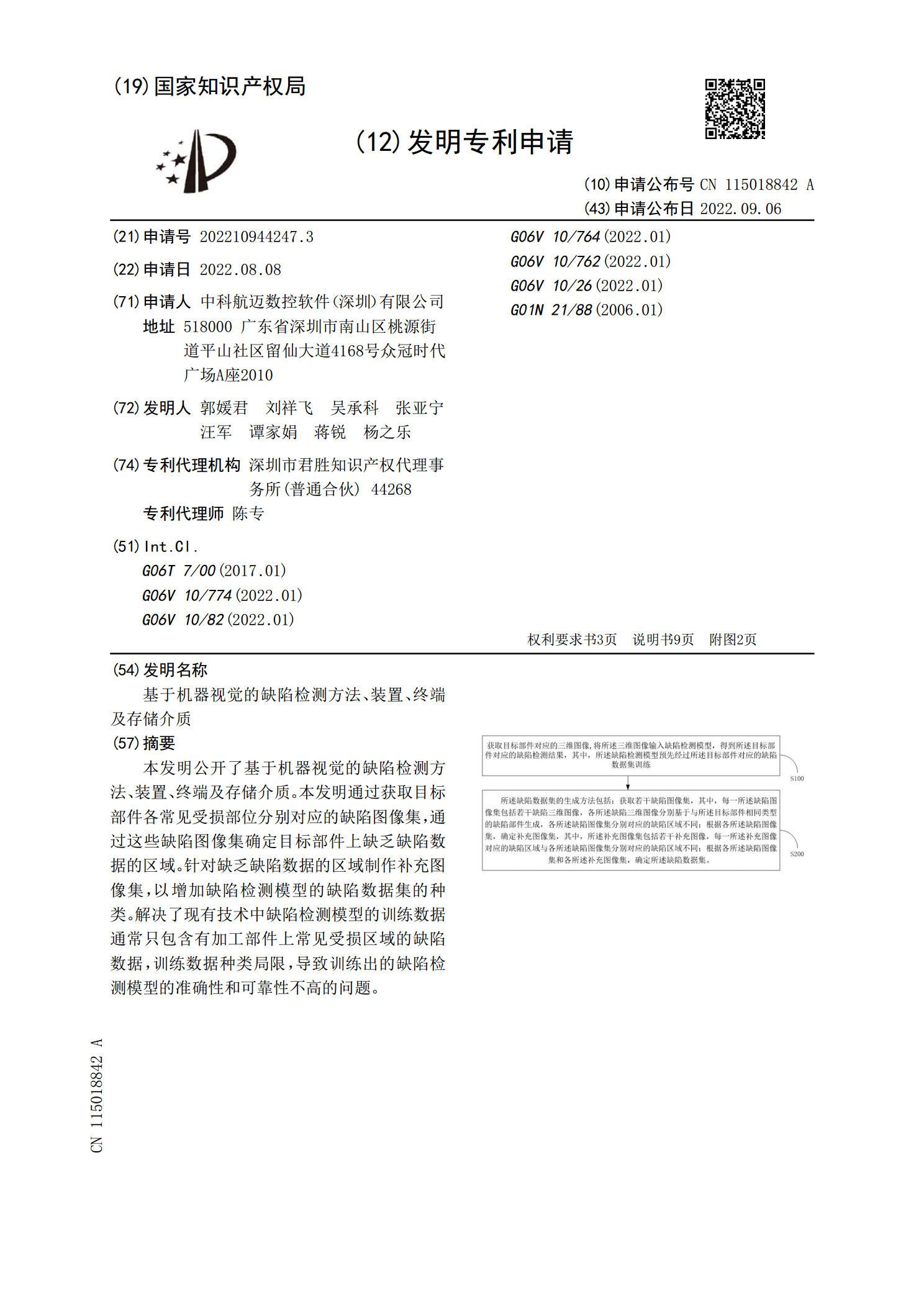
本发明公开了基于机器视觉的缺陷检测方法、装置、终端及存储介质。本发明通过获取目标部件各常见受损部位分别对应的缺陷图像集,通过这些缺陷图像集确定目标部件上缺乏缺陷数据的区域。针对缺乏缺陷数据的区域制作补充图像集,以增加缺陷检测模型的缺陷数据集的种类。解决了现有技术中缺陷检测模型的训练数据通常只包含有加工部件上常见受损区域的缺陷数据,训练数据种类局限,导致训练出的缺陷检测模型的准确性和可靠性不高的问题。