
目标检测方法、跟踪方法、装置、视觉传感器和介质.pdf

灵慧****89

1/10
2/10
3/10

4/10
5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
目标检测方法、跟踪方法、装置、视觉传感器和介质.pdf
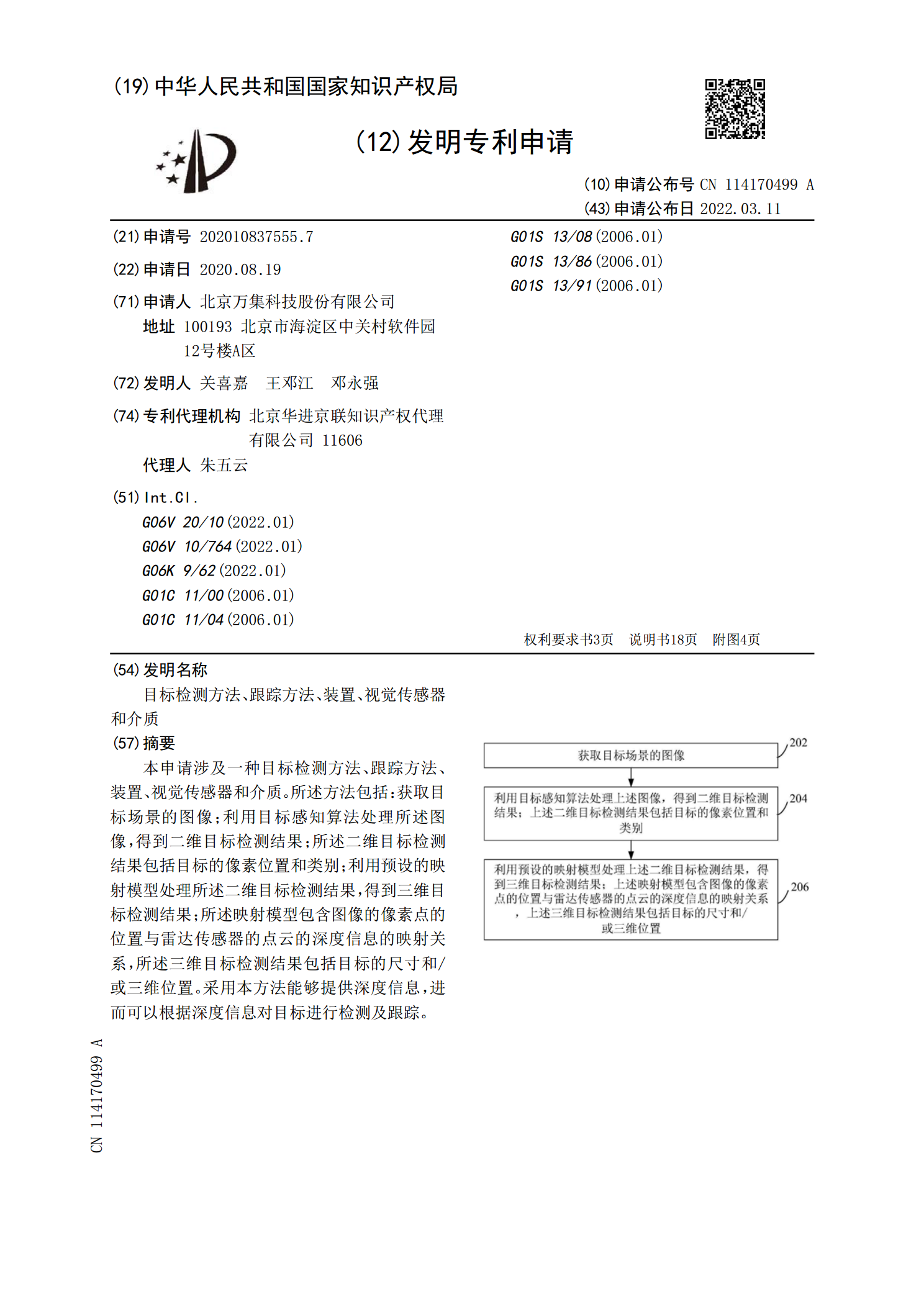
本申请涉及一种目标检测方法、跟踪方法、装置、视觉传感器和介质。所述方法包括:获取目标场景的图像;利用目标感知算法处理所述图像,得到二维目标检测结果;所述二维目标检测结果包括目标的像素位置和类别;利用预设的映射模型处理所述二维目标检测结果,得到三维目标检测结果;所述映射模型包含图像的像素点的位置与雷达传感器的点云的深度信息的映射关系,所述三维目标检测结果包括目标的尺寸和/或三维位置。采用本方法能够提供深度信息,进而可以根据深度信息对目标进行检测及跟踪。
超速检测方法、装置、视觉传感器和存储介质.pdf
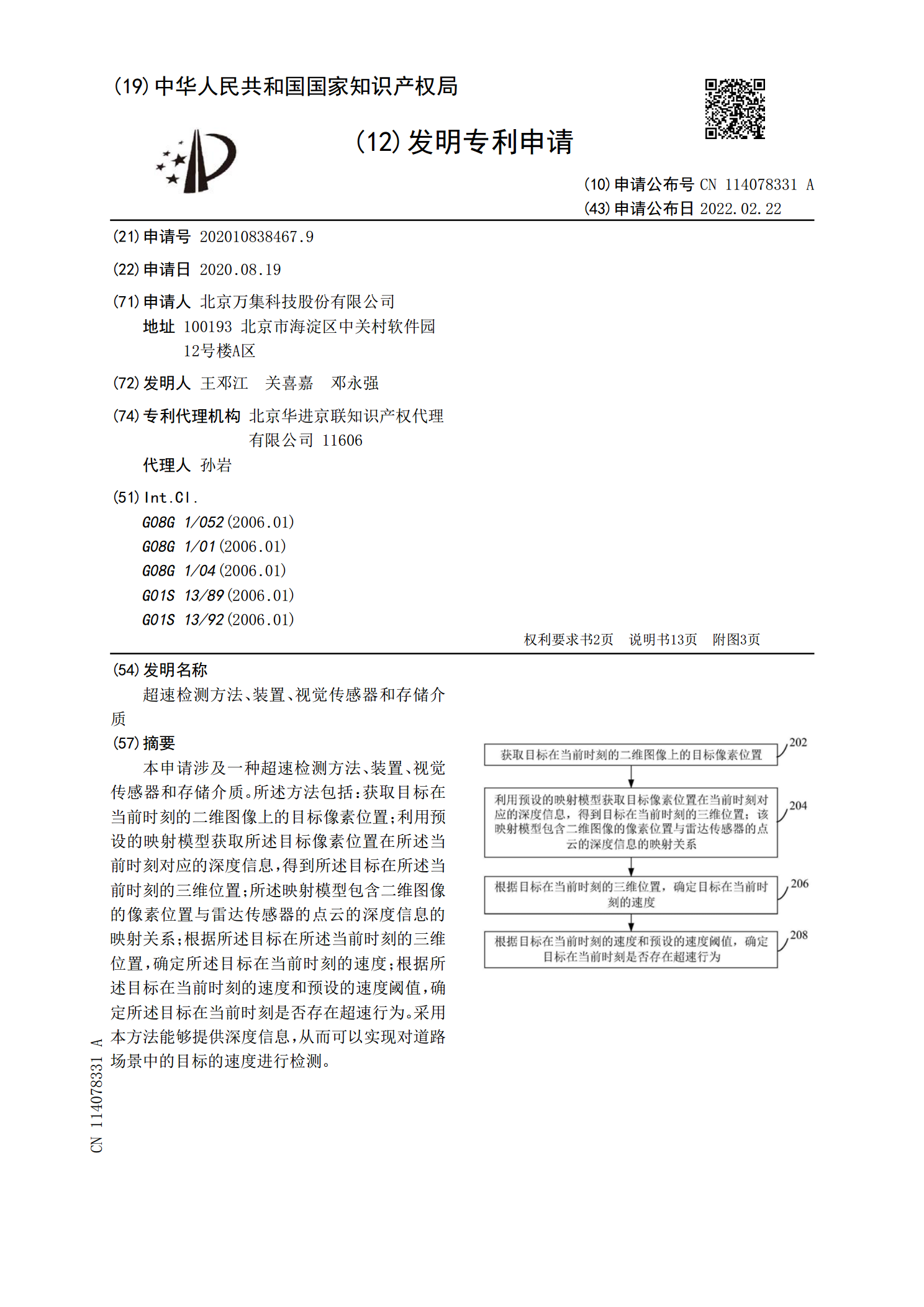
本申请涉及一种超速检测方法、装置、视觉传感器和存储介质。所述方法包括:获取目标在当前时刻的二维图像上的目标像素位置;利用预设的映射模型获取所述目标像素位置在所述当前时刻对应的深度信息,得到所述目标在所述当前时刻的三维位置;所述映射模型包含二维图像的像素位置与雷达传感器的点云的深度信息的映射关系;根据所述目标在所述当前时刻的三维位置,确定所述目标在当前时刻的速度;根据所述目标在当前时刻的速度和预设的速度阈值,确定所述目标在当前时刻是否存在超速行为。采用本方法能够提供深度信息,从而可以实现对道路场景中的目标的
碰撞检测方法、装置、视觉传感器和存储介质.pdf
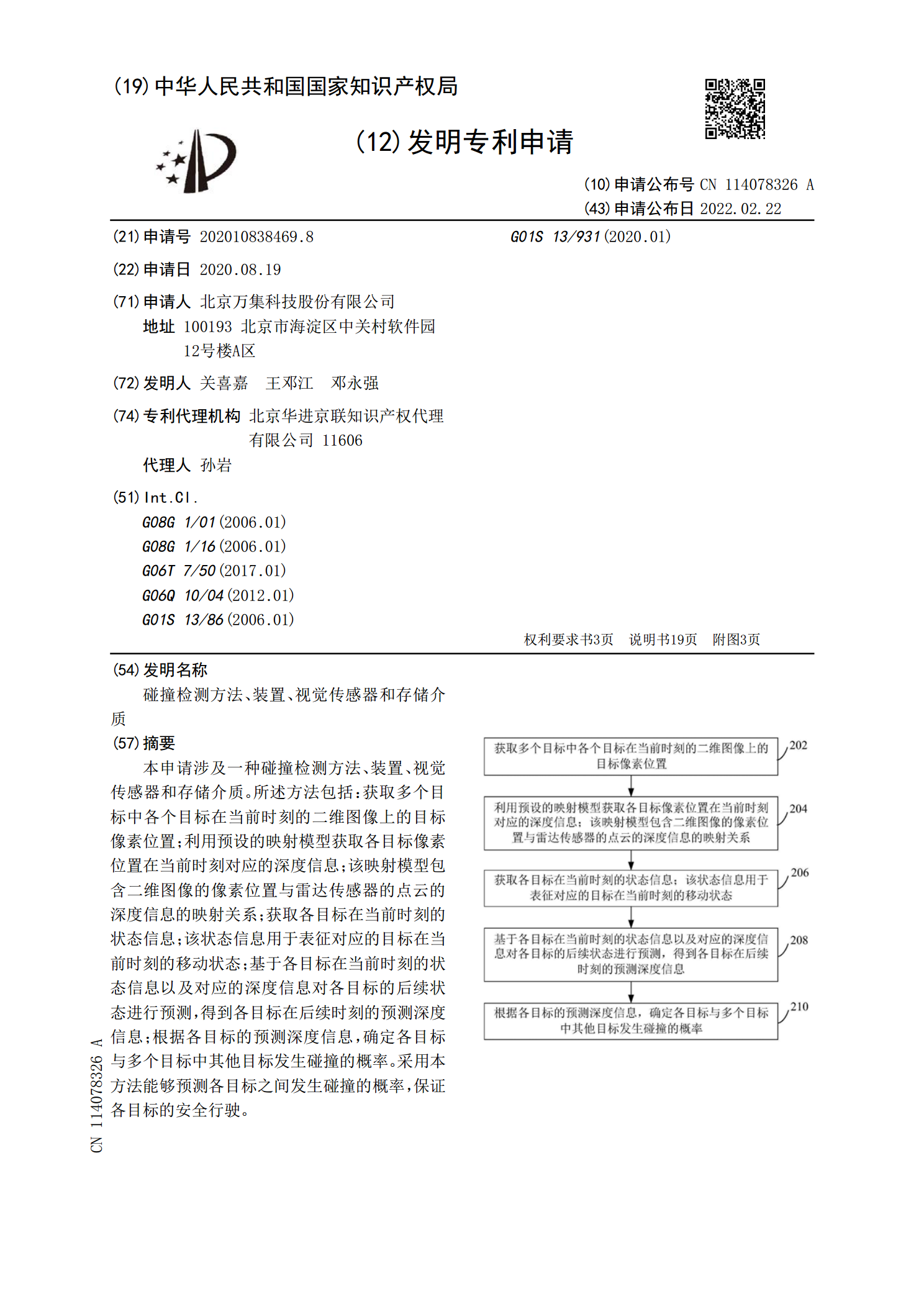
本申请涉及一种碰撞检测方法、装置、视觉传感器和存储介质。所述方法包括:获取多个目标中各个目标在当前时刻的二维图像上的目标像素位置;利用预设的映射模型获取各目标像素位置在当前时刻对应的深度信息;该映射模型包含二维图像的像素位置与雷达传感器的点云的深度信息的映射关系;获取各目标在当前时刻的状态信息;该状态信息用于表征对应的目标在当前时刻的移动状态;基于各目标在当前时刻的状态信息以及对应的深度信息对各目标的后续状态进行预测,得到各目标在后续时刻的预测深度信息;根据各目标的预测深度信息,确定各目标与多个目标中其他

目标检测跟踪方法、装置、设备及存储介质.pdf
本申请实施例公开了一种目标检测跟踪方法、装置、设备及存储介质。所述方法包括:在从第一摄像头采集的第一图像帧中检测到目标对象之后,确定目标对象的全局位置;根据目标对象的全局位置,从全局身份库中筛选出与目标对象匹配的n个候选对象的身份标识;对于n个候选对象中的每个候选对象,根据目标对象的关键点和候选对象的关键点在同一个图像坐标系中的位置,计算目标对象与候选对象之间的相似度;根据目标对象与各个候选对象之间的相似度,为所述目标对象分配身份标识。本申请实施例提供的技术方案中,解决了相关技术中所存在的准确性低的问题,
目标跟踪方法、装置、设备及介质.pdf
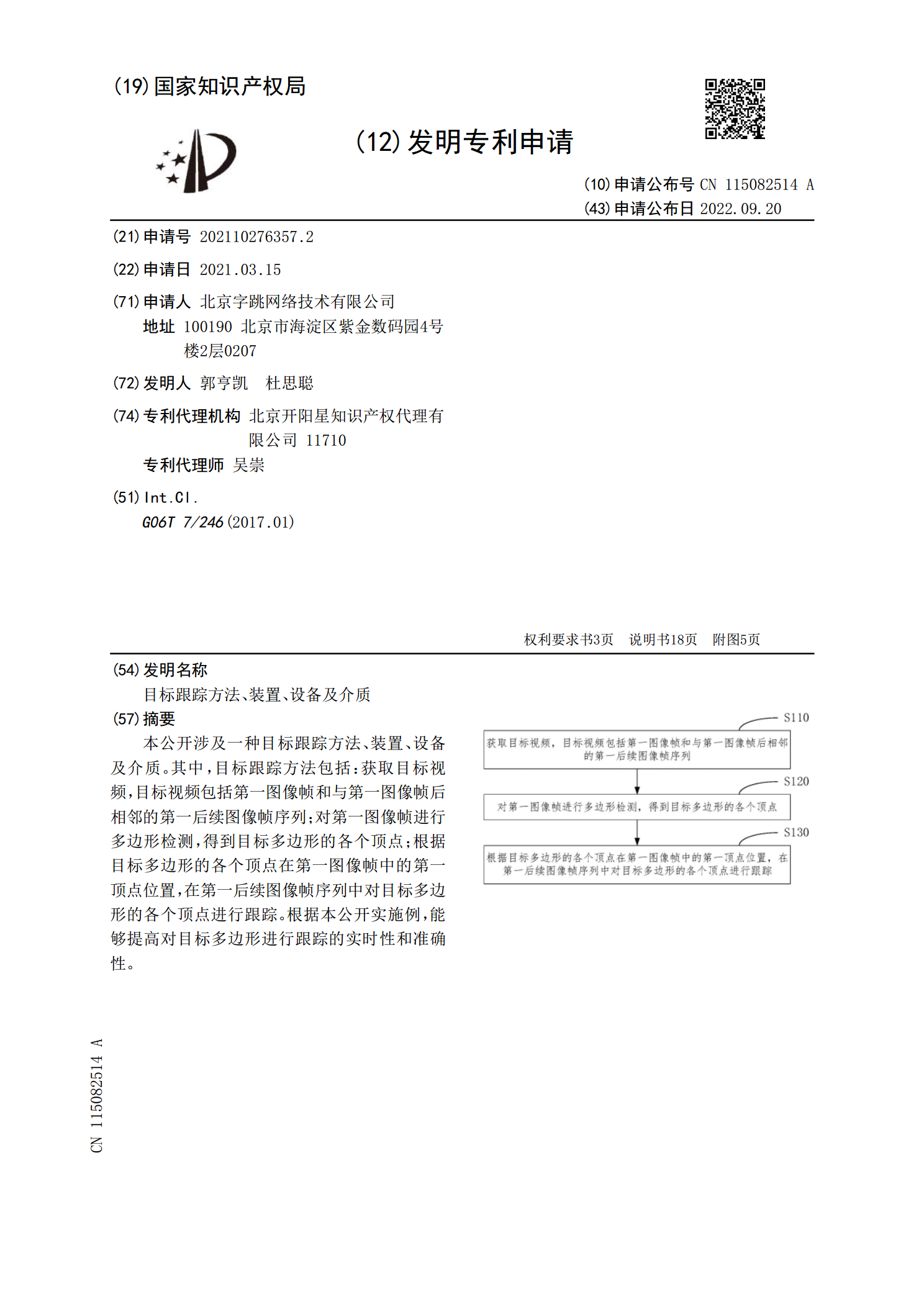
本公开涉及一种目标跟踪方法、装置、设备及介质。其中,目标跟踪方法包括:获取目标视频,目标视频包括第一图像帧和与第一图像帧后相邻的第一后续图像帧序列;对第一图像帧进行多边形检测,得到目标多边形的各个顶点;根据目标多边形的各个顶点在第一图像帧中的第一顶点位置,在第一后续图像帧序列中对目标多边形的各个顶点进行跟踪。根据本公开实施例,能够提高对目标多边形进行跟踪的实时性和准确性。