
碰撞检测方法、装置、视觉传感器和存储介质.pdf

Ro****44

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
碰撞检测方法、装置、视觉传感器和存储介质.pdf
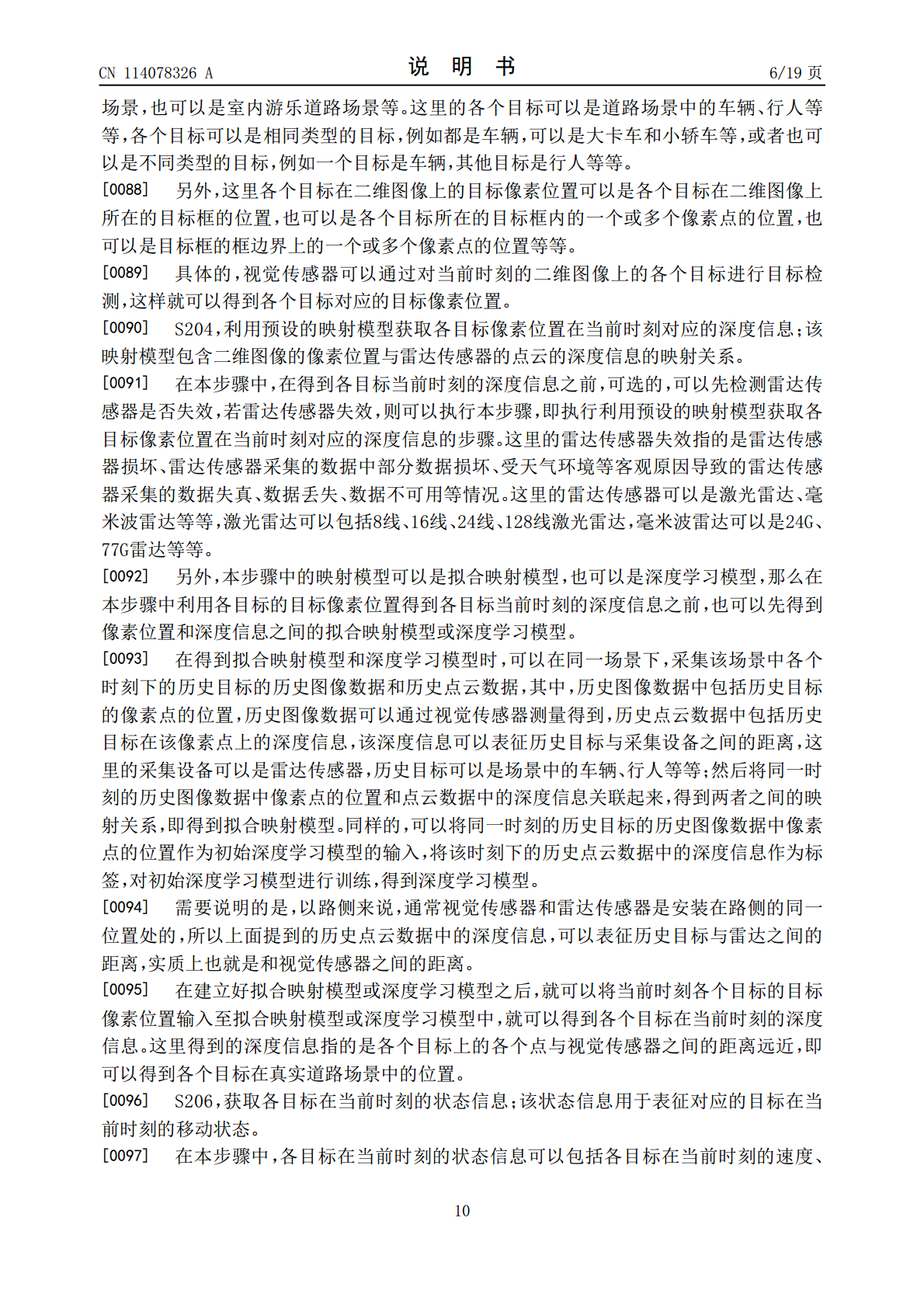
本申请涉及一种碰撞检测方法、装置、视觉传感器和存储介质。所述方法包括:获取多个目标中各个目标在当前时刻的二维图像上的目标像素位置;利用预设的映射模型获取各目标像素位置在当前时刻对应的深度信息;该映射模型包含二维图像的像素位置与雷达传感器的点云的深度信息的映射关系;获取各目标在当前时刻的状态信息;该状态信息用于表征对应的目标在当前时刻的移动状态;基于各目标在当前时刻的状态信息以及对应的深度信息对各目标的后续状态进行预测,得到各目标在后续时刻的预测深度信息;根据各目标的预测深度信息,确定各目标与多个目标中其他
超速检测方法、装置、视觉传感器和存储介质.pdf
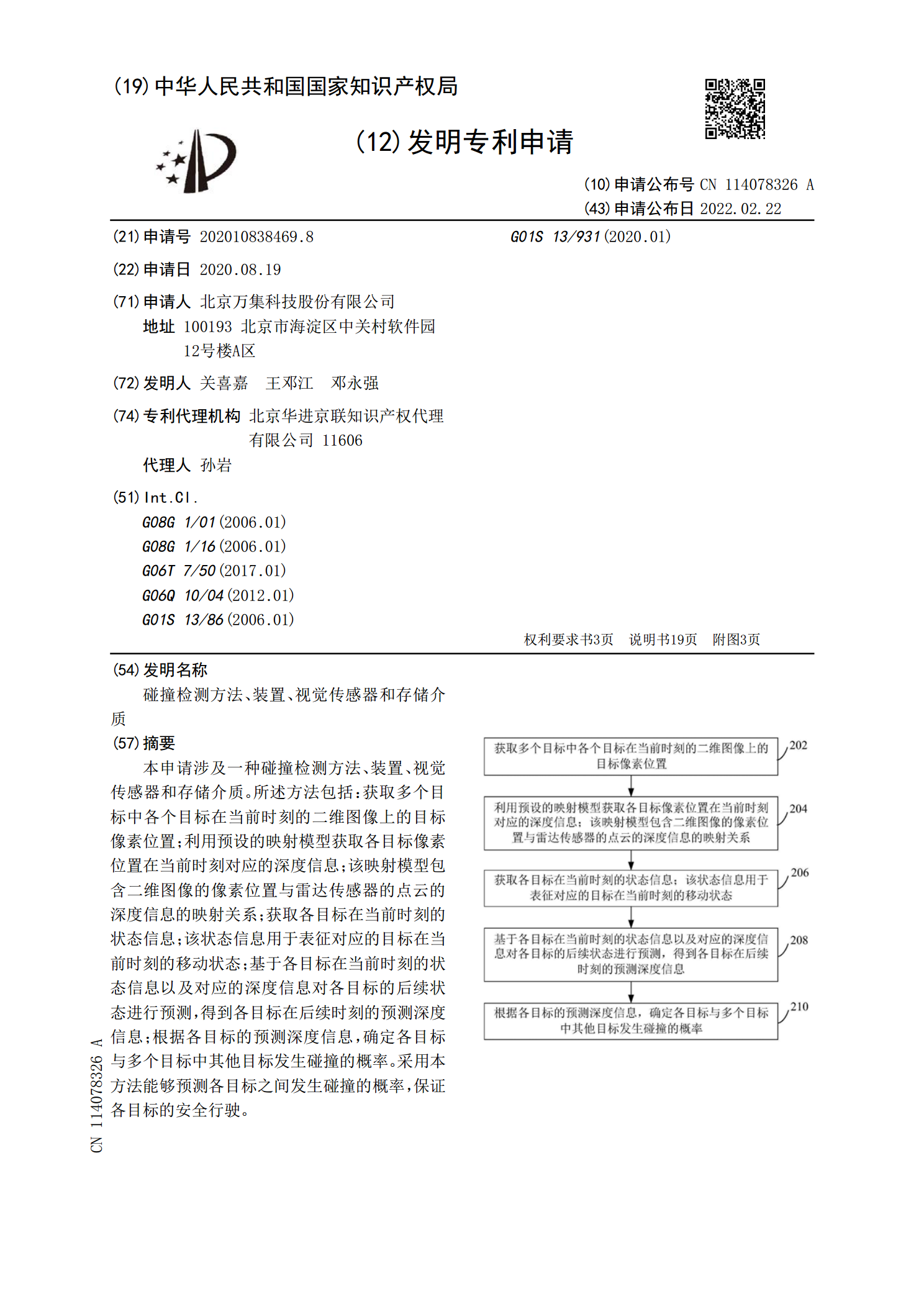
本申请涉及一种超速检测方法、装置、视觉传感器和存储介质。所述方法包括:获取目标在当前时刻的二维图像上的目标像素位置;利用预设的映射模型获取所述目标像素位置在所述当前时刻对应的深度信息,得到所述目标在所述当前时刻的三维位置;所述映射模型包含二维图像的像素位置与雷达传感器的点云的深度信息的映射关系;根据所述目标在所述当前时刻的三维位置,确定所述目标在当前时刻的速度;根据所述目标在当前时刻的速度和预设的速度阈值,确定所述目标在当前时刻是否存在超速行为。采用本方法能够提供深度信息,从而可以实现对道路场景中的目标的
碰撞检测方法、装置、电子设备和存储介质.pdf
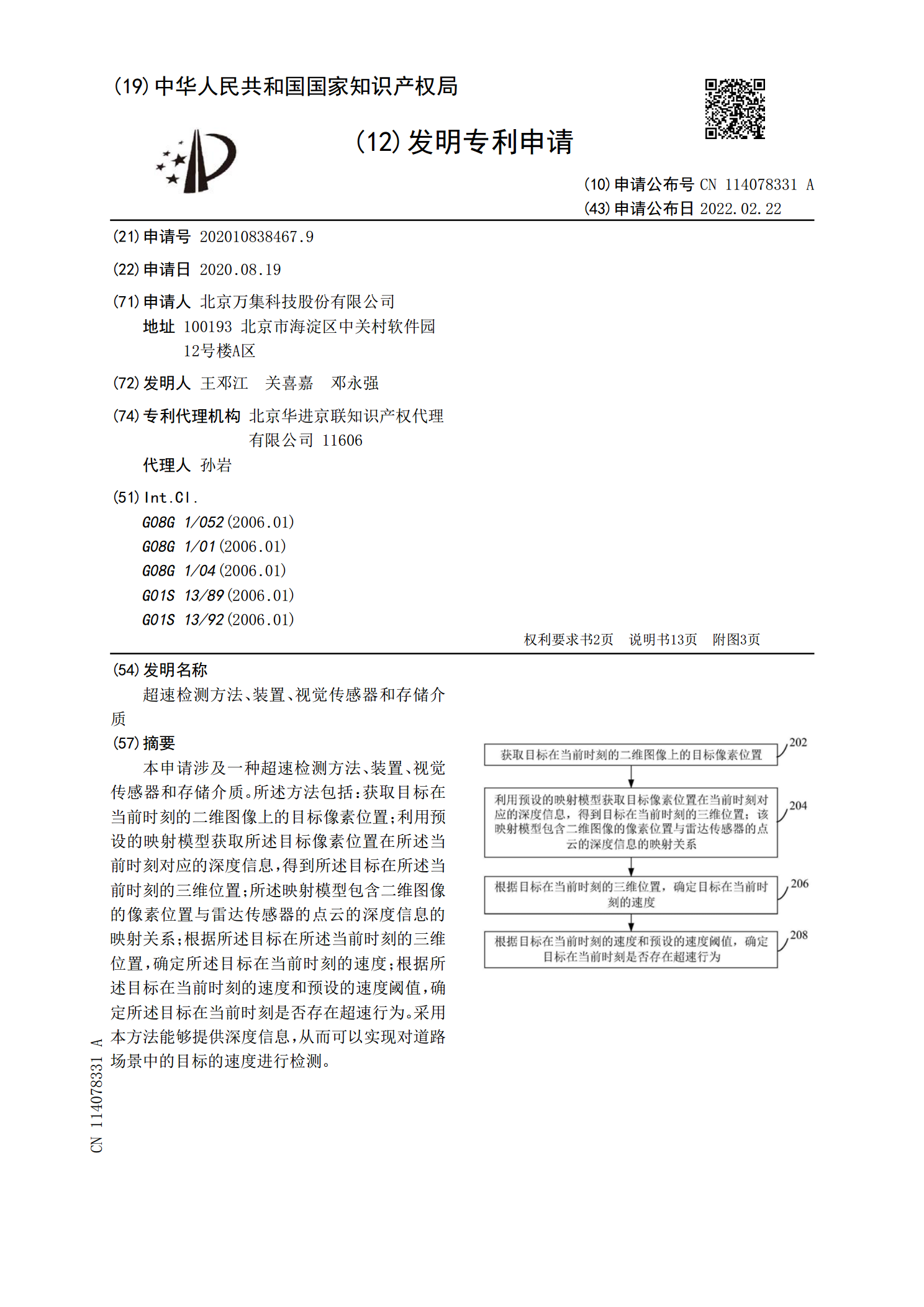
本申请提供了一种碰撞检测方法、装置、电子设备和存储介质,其中,该方法包括:获取在目标客户端执行的目标操作,其中,所述目标操作用于触发目标游戏场景中的目标虚拟角色释放目标角色技能;应所述目标操作,获取所述目标角色技能的目标碰撞盒的时移信息,其中,每个所述目标角色技能关联至少一个所述目标碰撞盒,所述时移信息用于确定所述碰撞盒的时间与位置的对应关系;以及基于所述时移信息确定所述目标碰撞盒与碰撞对象碰撞盒的碰撞状态,其中,所述碰撞对象碰撞盒包括碰撞对象关联的碰撞盒和/或所述碰撞对象的对象技能关联的碰撞盒。上述方案
碰撞检测方法、装置、电子设备和存储介质.pdf
本公开提供了碰撞检测方法、装置、电子设备和存储介质,涉及人工智能领域,尤其涉及智能交通技术,具体可用于智慧城市和智能交通场景下。具体实现方案为:获取目标用户端的第一运动信息,并接收同车用户端的第二运动信息;根据所述第一运动信息和所述第二运动信息,检测承载所述目标用户的车辆的碰撞事件。本公开实施例可以提高碰撞检测的准确率和效率。
碰撞检测方法、装置、设备、可读存储介质和程序产品.pdf
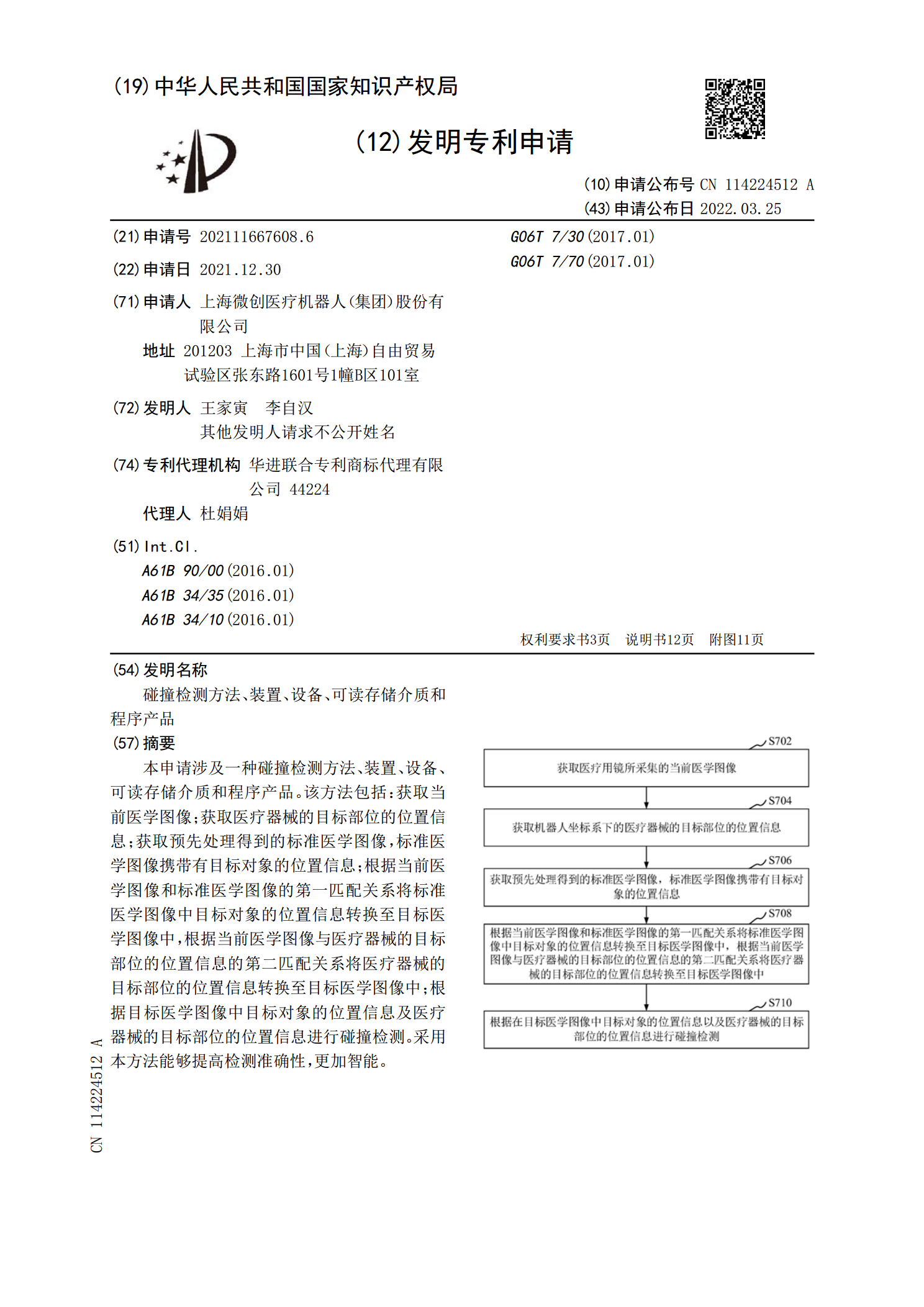
本申请涉及一种碰撞检测方法、装置、设备、可读存储介质和程序产品。该方法包括:获取当前医学图像;获取医疗器械的目标部位的位置信息;获取预先处理得到的标准医学图像,标准医学图像携带有目标对象的位置信息;根据当前医学图像和标准医学图像的第一匹配关系将标准医学图像中目标对象的位置信息转换至目标医学图像中,根据当前医学图像与医疗器械的目标部位的位置信息的第二匹配关系将医疗器械的目标部位的位置信息转换至目标医学图像中;根据目标医学图像中目标对象的位置信息及医疗器械的目标部位的位置信息进行碰撞检测。采用本方法能够提高检