
伺服驱动器的S曲线生成方法、装置和伺服驱动器.pdf

鹏飞****可爱

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
伺服驱动器的S曲线生成方法、装置和伺服驱动器.pdf
本申请公开了伺服驱动器的S曲线生成方法、装置和伺服驱动器,该方法包括:获取伺服电机的预定加速度、预定启动速度和预定目标速度;根据所述预定启动速度和所述预定目标速度确定标准曲线对应的多个标准值与多个索引值所组成的对照表;根据所述对照表、所述预定加速度、所述预定启动速度和所述预定目标速度生成伺服驱动器的S曲线,实现利用较少的算力、较短的时间生成S曲线,本申请可以有效降低S曲线的生成成本。

伺服驱动器的防震装置.pdf
本发明公开一种伺服驱动器的防震装置,包括基板、第一弹性组件和第二弹性组件;基板包括用于固定伺服驱动器本体的上基板和下基板,下基板上设有多个容纳腔,第一弹性组件包括固定于上基板的第一连接杆、固定于下基板的第二连接杆以及连接第一连接杆和第二连接杆的第一弹性件,第二弹性组件包括多个支撑杆、多个第二弹性件和多个转动板,支撑杆包括固定于上基板的固定部、与转动板连接的转动部和安装部,第二弹性件的一端固定于安装部,第二弹性件的另一端固定于下基板;本发明技术方案通过在上基板和下基板之间设置第一弹性组件和第二弹性组件来增加
一种伺服驱动器开关电源及其伺服驱动器.pdf
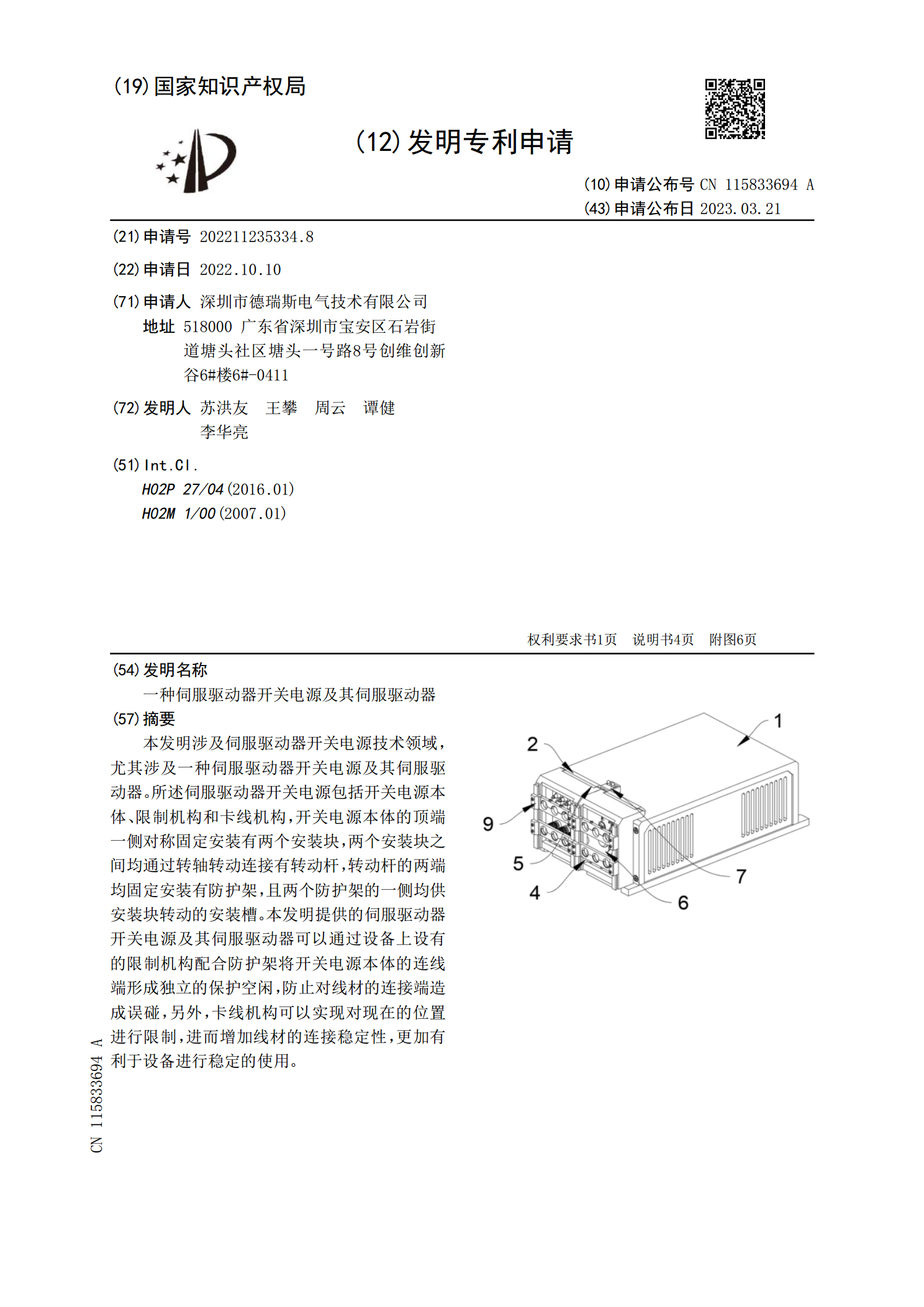
本发明涉及伺服驱动器开关电源技术领域,尤其涉及一种伺服驱动器开关电源及其伺服驱动器。所述伺服驱动器开关电源包括开关电源本体、限制机构和卡线机构,开关电源本体的顶端一侧对称固定安装有两个安装块,两个安装块之间均通过转轴转动连接有转动杆,转动杆的两端均固定安装有防护架,且两个防护架的一侧均供安装块转动的安装槽。本发明提供的伺服驱动器开关电源及其伺服驱动器可以通过设备上设有的限制机构配合防护架将开关电源本体的连线端形成独立的保护空闲,防止对线材的连接端造成误碰,另外,卡线机构可以实现对现在的位置进行限制,进而增
伺服驱动器参数设置方法.pdf
伺服驱动器参数设置方法--伺服驱动器参数设置方法在自动化设备中经常用到伺服电机特别是位置控制大部分品牌的伺服电机都有位置控制功能通过控制器发出脉冲来控制伺服电机运行脉冲数对应转的角度脉冲频率对应速度(与电子齿轮设定有关)当一个新的系统参数不能工作时首先设定位置增益确保电机无噪音情况下尽量设大些转动惯量比也非常重要可通过自学习设定的数来参考然后设定速度增益和速度积分时间确保在低速运行时连续位置精
伺服驱动器参数设置方法.pdf
伺服驱动器参数设置方法--伺服驱动器参数设置方法在自动化设备中,经常用到伺服电机,特别是位置控制,大部分品牌的伺服电机都有位置控制功能,通过控制器发出脉冲来控制伺服电机运行,脉冲数对应转的角度,脉冲频率对应速度(与电子齿轮设定有关),当一个新的系统,参数不能工作时,首先设定位置增益,确保电机无噪音情况下,尽量设大些,转动惯量比也非常重要,可通过自学习设定的数来参考,然后设定速度增益和速度积分时间,确保在低速运行时连续,位置精度受控即可。1.位置比例增益:设定位置环调节器的比例增益。设置值越大,增益越高,刚