
辅助制动动态控制方法.pdf

雨巷****凝海

1/10
2/10
3/10

4/10

5/10
6/10
7/10
8/10

9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

辅助制动动态控制方法.pdf
本发明涉及辅助制动动态控制方法,包含步骤:采集档位信息、整车质量、整车车速、坡度、目标车速、辅助制动手柄状态、防抱死制动系统状态、外部取力系统状态、发动机转速和油门开度;根据车速闭环,计算得到辅助制动需求负扭矩;获取辅助制动所需要的需求减速度;根据需求减速度,计算得到辅助制动需求负扭矩;根据整车质量和整车车速,计算得到辅助制动需求负扭矩;输出辅助制动需求负扭矩,即为本发明动态控制方法的最终输出结果。本发明提高了驾驶员操控和辅助制动感受;可以方便主机厂适配不同辅助制动手柄档位形式。

车辆电控风扇辅助制动系统及辅助制动方法.pdf
本发明涉及汽车发动机辅助制动技术领域。本发明提供一种车辆电控风扇辅助制动系统及辅助制动方法。辅助制动系统包括电控风扇、发动机和发动机ECU,电控风扇包括风扇和风扇离合器,发动机通过风扇离合器驱动风扇转动,发动机ECU控制风扇离合器的啮合比例;发动机ECU与整车VCU信号连接,当整车VCU识别出整车进入制动操作时,发送制动信号至发动机ECU,发动机ECU接到制动信号后控制风扇离合器进入全啮合状态,风扇全速转动;由于风扇转动需要克服空气阻力,从而风扇能够反向拖动发动机曲轴,实现辅助制动。其可在现有动力总成不变
制动辅助系统及其方法.pdf
本发明公开了车辆的制动辅助系统及其方法,该系统包括:检测单元,适用于检测车辆中的乘客和/或行李的重量;制动辅助信号生成单元,适用于基于该检测单元检测到的重量生成制动辅助信号;信号传输单元,适用于接收来自制动辅助信号生成单元的制动辅助信号并且传送该制动辅助信号到车辆的制动系统。通过将车辆中的乘客和/或行李的重量考虑在内并且将这样的制动辅助信号提供给车辆的制动系统,能够以更精确的方式实现车辆的制动。
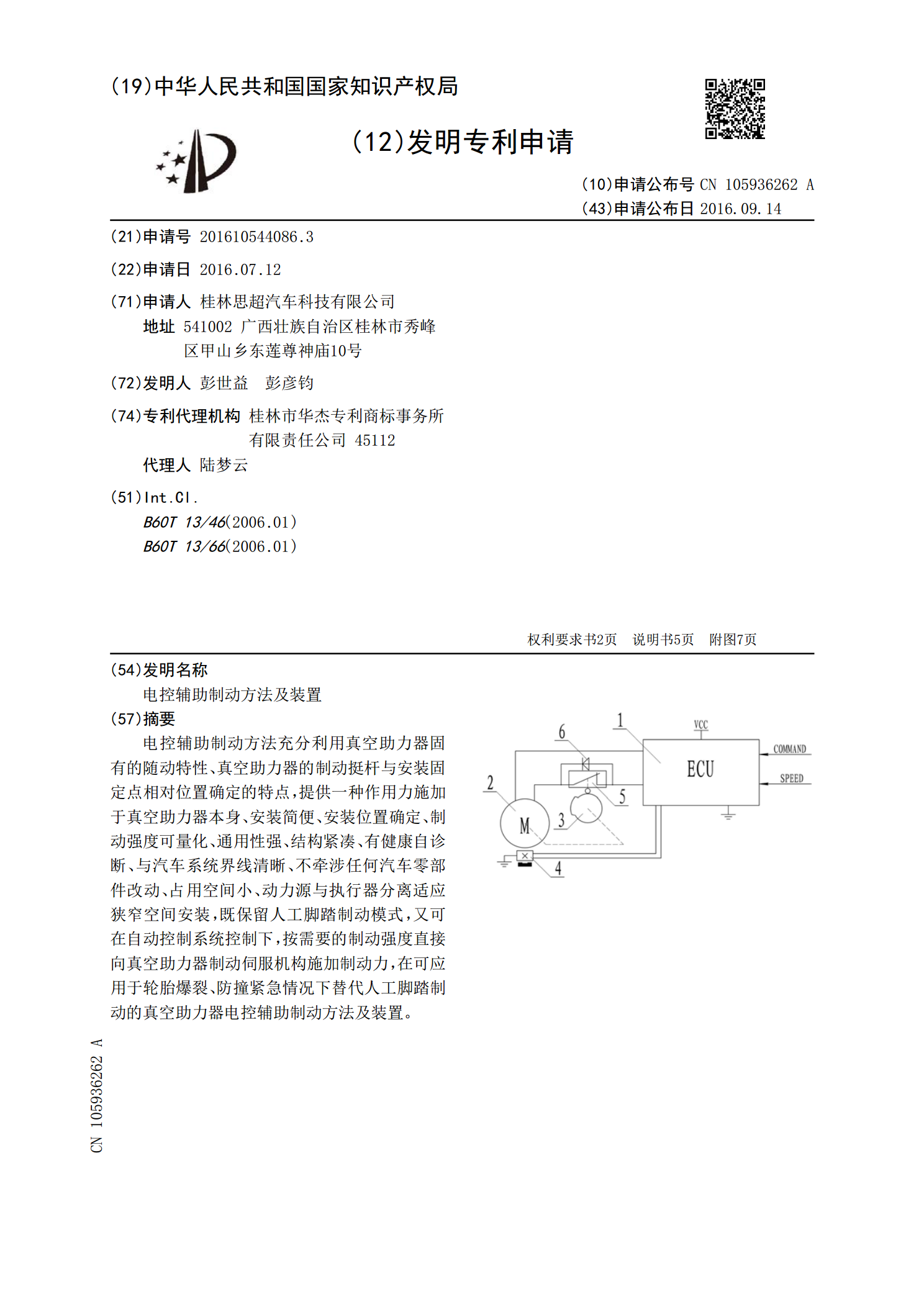
电控辅助制动方法及装置.pdf
电控辅助制动方法充分利用真空助力器固有的随动特性、真空助力器的制动挺杆与安装固定点相对位置确定的特点,提供一种作用力施加于真空助力器本身、安装简便、安装位置确定、制动强度可量化、通用性强、结构紧凑、有健康自诊断、与汽车系统界线清晰、不牵涉任何汽车零部件改动、占用空间小、动力源与执行器分离适应狭窄空间安装,既保留人工脚踏制动模式,又可在自动控制系统控制下,按需要的制动强度直接向真空助力器制动伺服机构施加制动力,在可应用于轮胎爆裂、防撞紧急情况下替代人工脚踏制动的真空助力器电控辅助制动方法及装置。

辅助制动装置及车辆制动系统.pdf
本申请公开了一种车辆制动系统及其辅助制动装置,所述辅助制动装置包括:微控制器;制动状态检测元件,配置成用于检测车辆的制动状态并将检测信息发送到所述微控制器;以及执行单元,被所述微控制器控制,并且包括:电动机;用于将所述电动机的输出转动减速的减速机构;由所述减速机构驱动的执行元件;以及设在车辆刹车线中途并且与所述执行元件接合的从动件;其中,所述电动机能够经所述减速机构驱动所述执行元件运动,使得所述执行元件作用于所述从动件,从而取决于执行元件的运动方向而在刹车线中产生与刹车线的制动力相反的防抱死作用力或是在刹