
一种编队避障方法及装置.pdf

朋兴****en

1/10
2/10
3/10
4/10
5/10
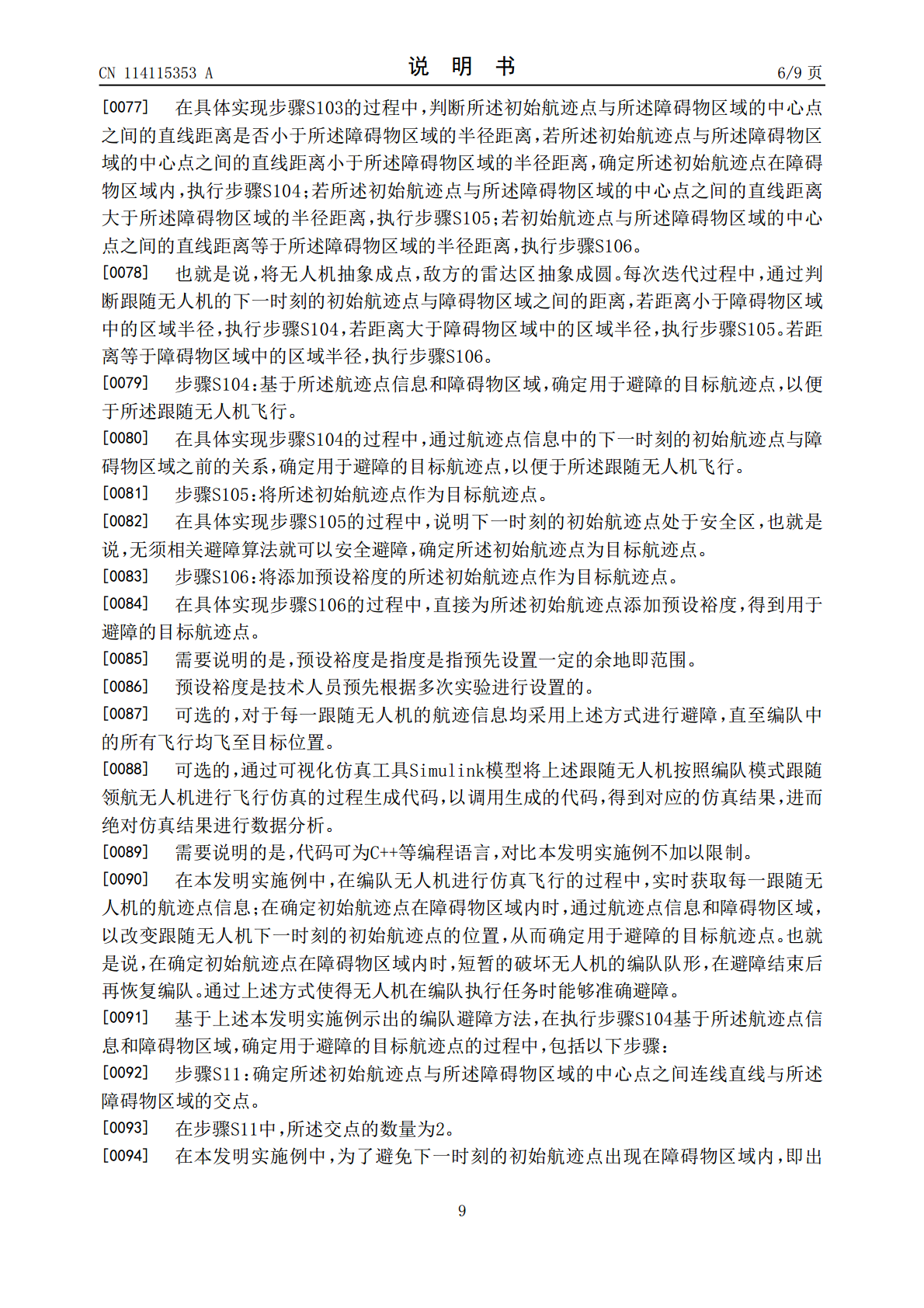
6/10
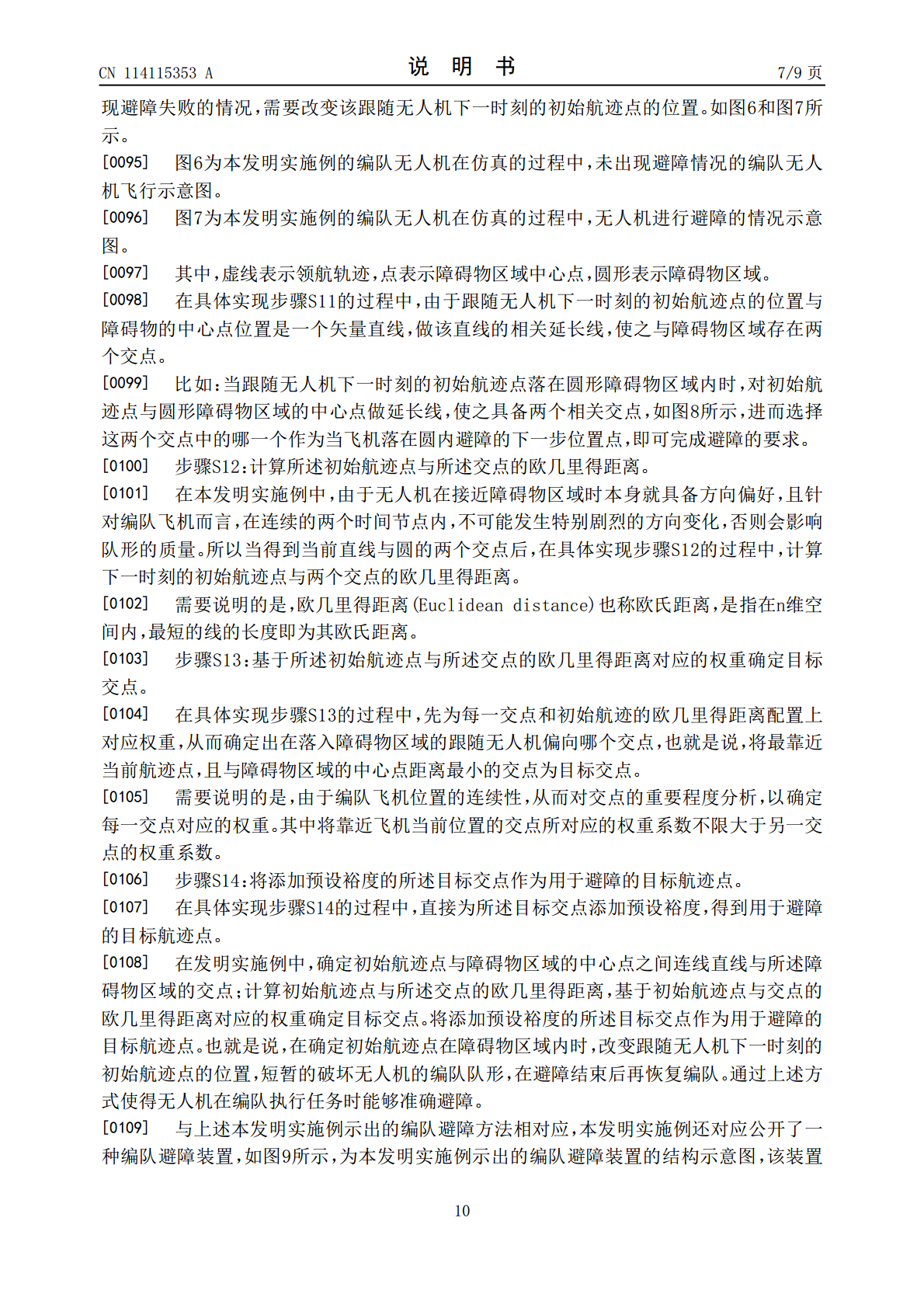
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种编队避障方法及装置.pdf
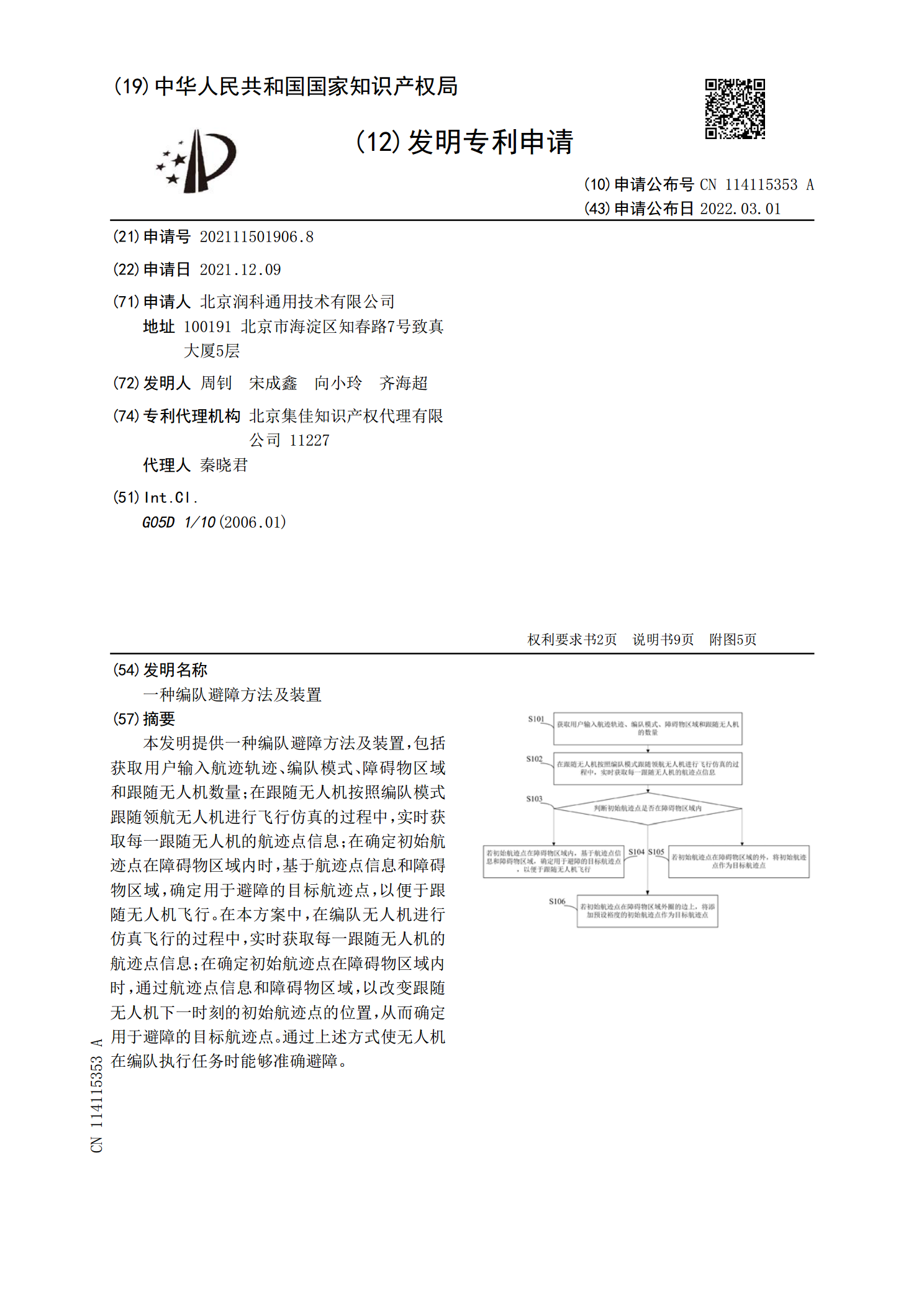
本发明提供一种编队避障方法及装置,包括获取用户输入航迹轨迹、编队模式、障碍物区域和跟随无人机数量;在跟随无人机按照编队模式跟随领航无人机进行飞行仿真的过程中,实时获取每一跟随无人机的航迹点信息;在确定初始航迹点在障碍物区域内时,基于航迹点信息和障碍物区域,确定用于避障的目标航迹点,以便于跟随无人机飞行。在本方案中,在编队无人机进行仿真飞行的过程中,实时获取每一跟随无人机的航迹点信息;在确定初始航迹点在障碍物区域内时,通过航迹点信息和障碍物区域,以改变跟随无人机下一时刻的初始航迹点的位置,从而确定用于避障的
一种多机编队避障的航迹规划方法.pdf
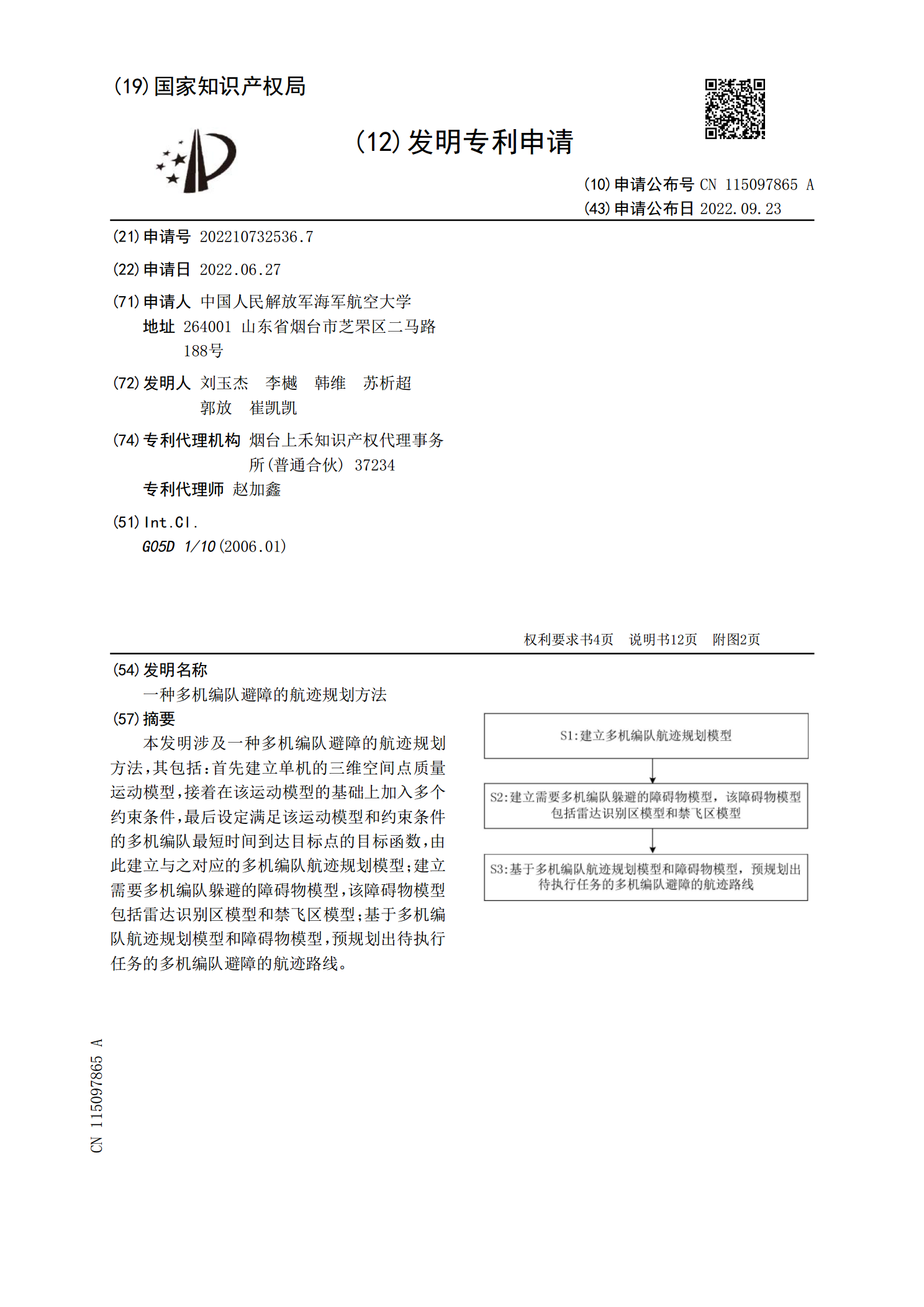
本发明涉及一种多机编队避障的航迹规划方法,其包括:首先建立单机的三维空间点质量运动模型,接着在该运动模型的基础上加入多个约束条件,最后设定满足该运动模型和约束条件的多机编队最短时间到达目标点的目标函数,由此建立与之对应的多机编队航迹规划模型;建立需要多机编队躲避的障碍物模型,该障碍物模型包括雷达识别区模型和禁飞区模型;基于多机编队航迹规划模型和障碍物模型,预规划出待执行任务的多机编队避障的航迹路线。
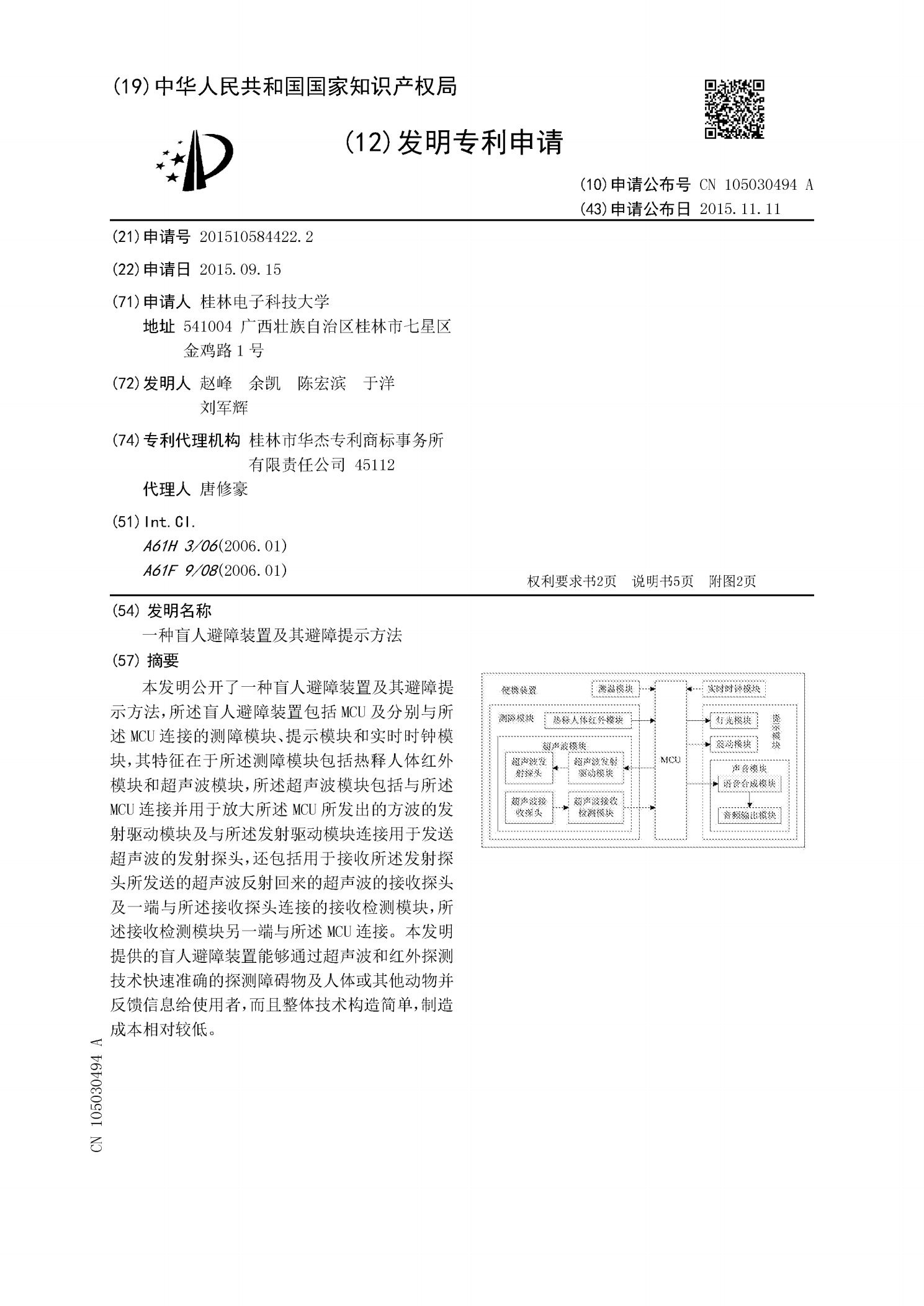
一种盲人避障装置及其避障提示方法.pdf
本发明公开了一种盲人避障装置及其避障提示方法,所述盲人避障装置包括MCU及分别与所述MCU连接的测障模块、提示模块和实时时钟模块,其特征在于所述测障模块包括热释人体红外模块和超声波模块,所述超声波模块包括与所述MCU连接并用于放大所述MCU所发出的方波的发射驱动模块及与所述发射驱动模块连接用于发送超声波的发射探头,还包括用于接收所述发射探头所发送的超声波反射回来的超声波的接收探头及一端与所述接收探头连接的接收检测模块,所述接收检测模块另一端与所述MCU连接。本发明提供的盲人避障装置能够通过超声波和红外探测
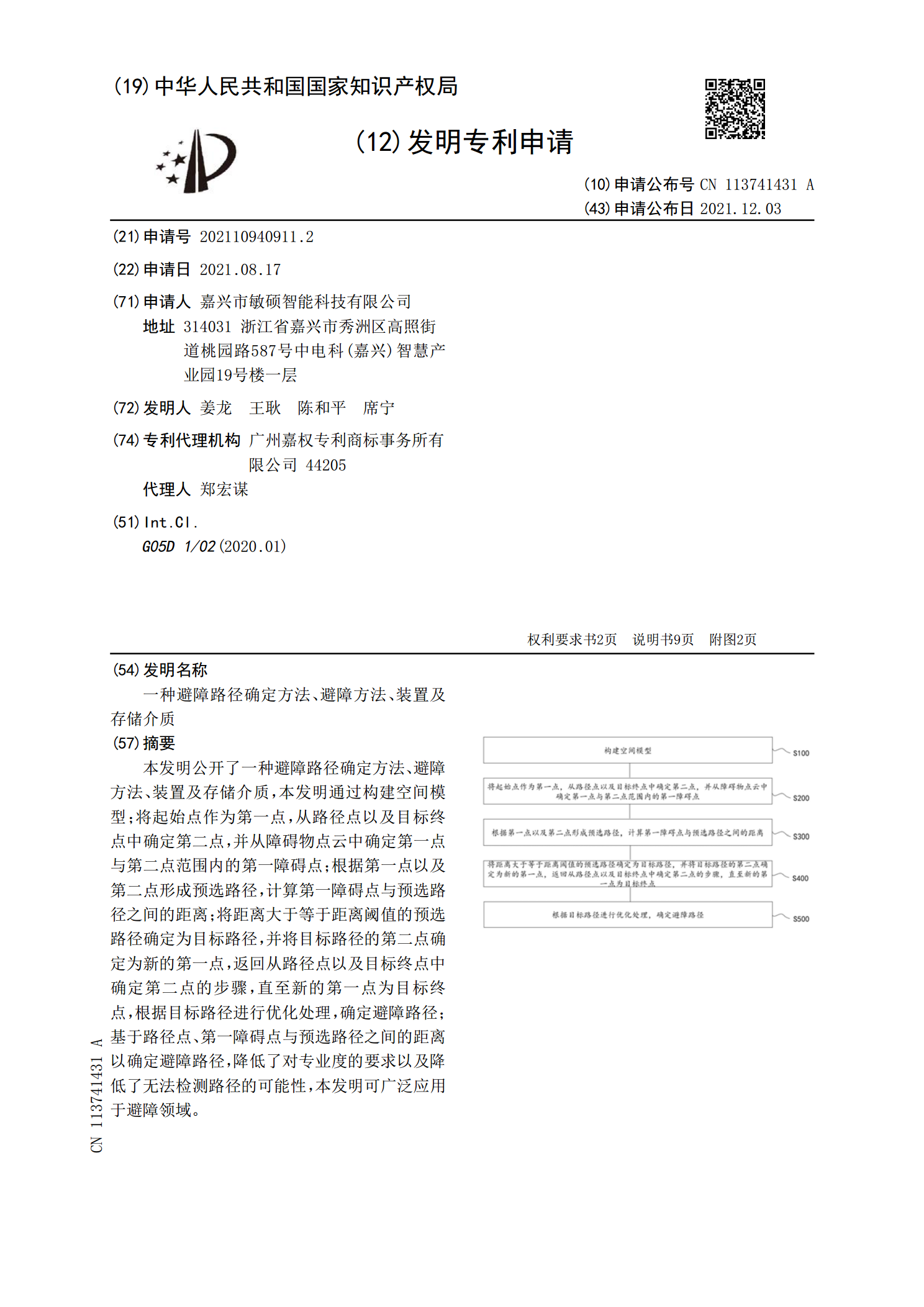
一种避障路径确定方法、避障方法、装置及存储介质.pdf
本发明公开了一种避障路径确定方法、避障方法、装置及存储介质,本发明通过构建空间模型;将起始点作为第一点,从路径点以及目标终点中确定第二点,并从障碍物点云中确定第一点与第二点范围内的第一障碍点;根据第一点以及第二点形成预选路径,计算第一障碍点与预选路径之间的距离;将距离大于等于距离阈值的预选路径确定为目标路径,并将目标路径的第二点确定为新的第一点,返回从路径点以及目标终点中确定第二点的步骤,直至新的第一点为目标终点,根据目标路径进行优化处理,确定避障路径;基于路径点、第一障碍点与预选路径之间的距离以确定避障
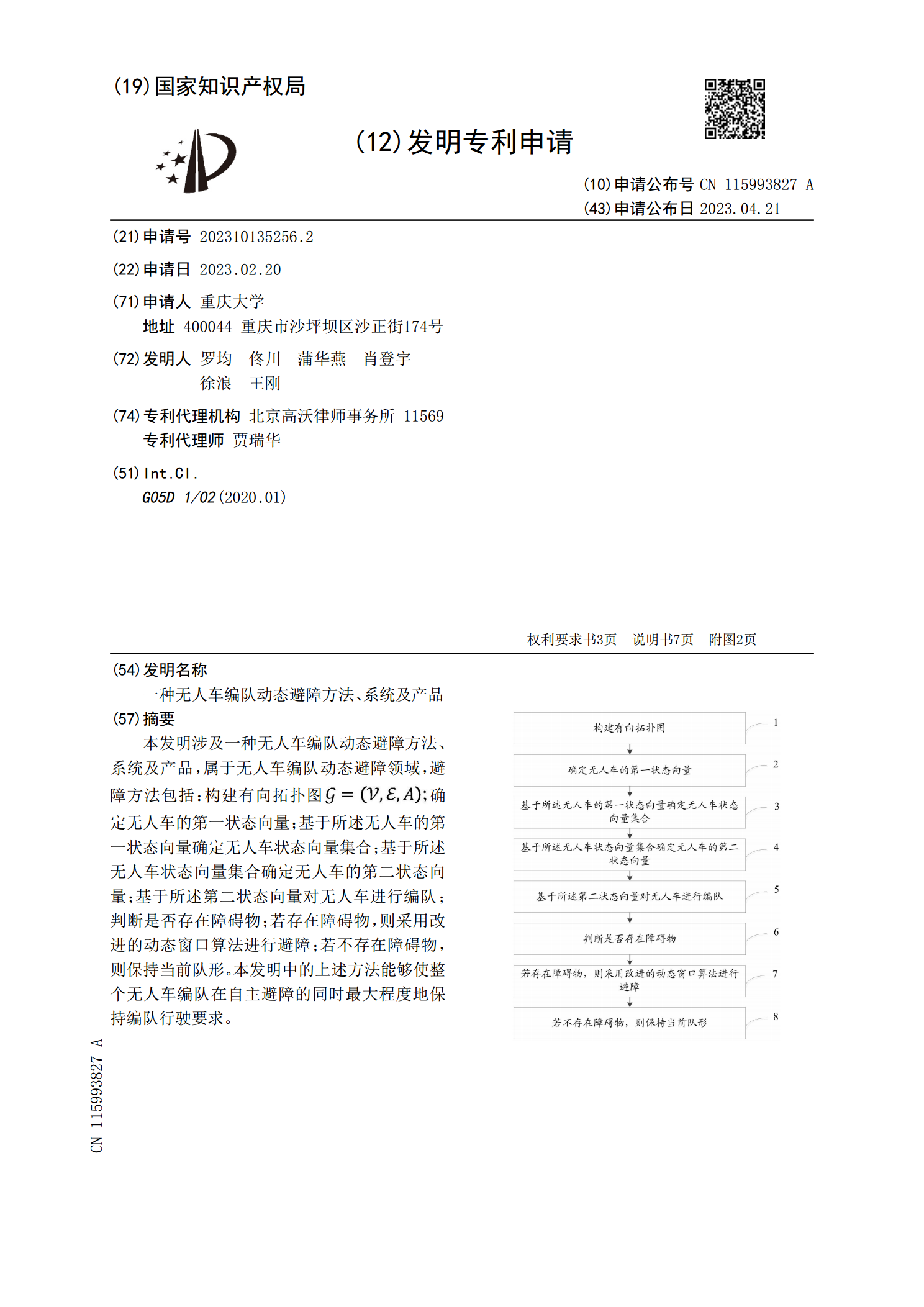
一种无人车编队动态避障方法、系统及产品.pdf
本发明涉及一种无人车编队动态避障方法、系统及产品,属于无人车编队动态避障领域,避障方法包括:构建有向拓扑图