
一种无人车编队动态避障方法、系统及产品.pdf

书生****写意

1/10

2/10

3/10

4/10

5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种无人车编队动态避障方法、系统及产品.pdf
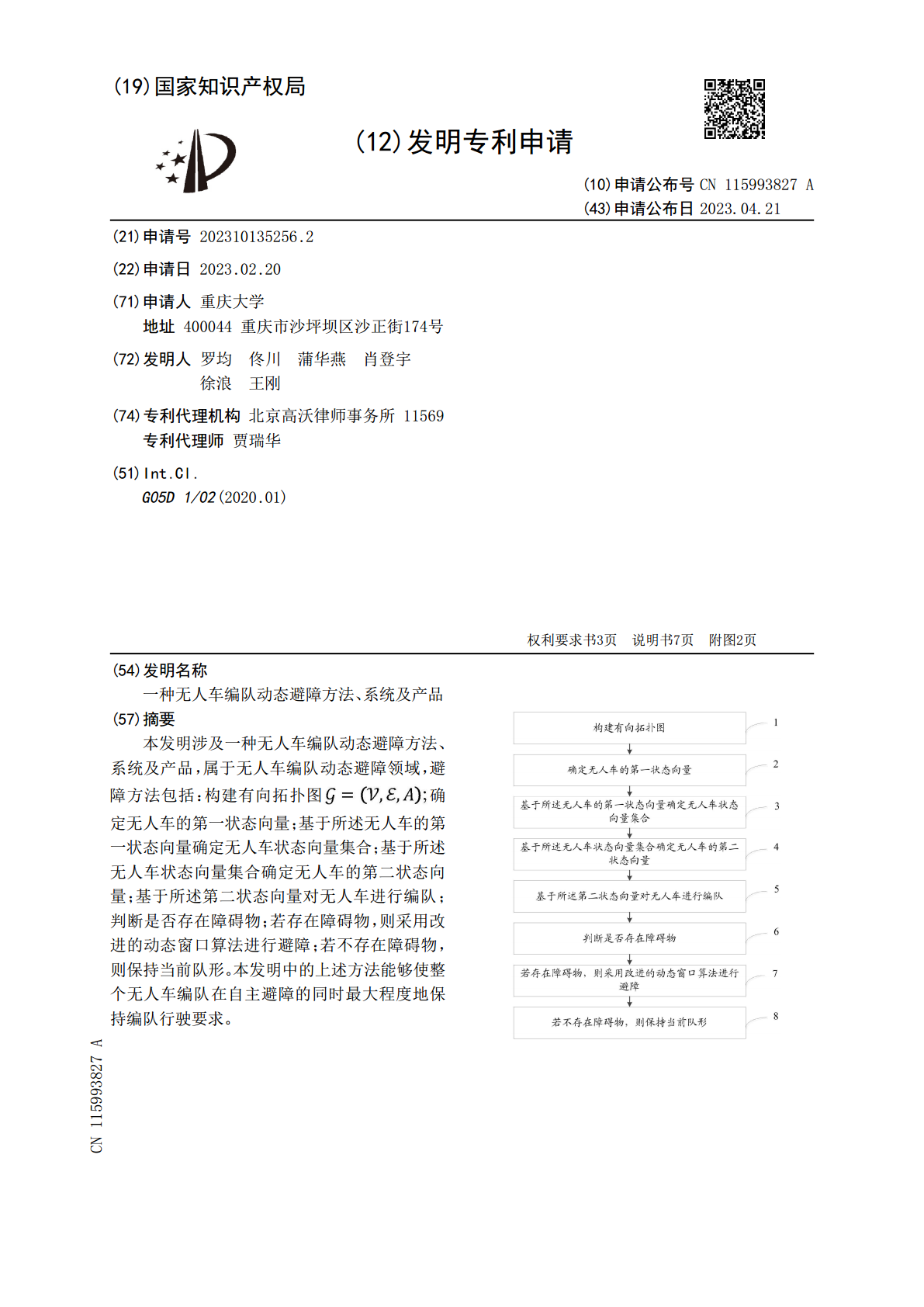
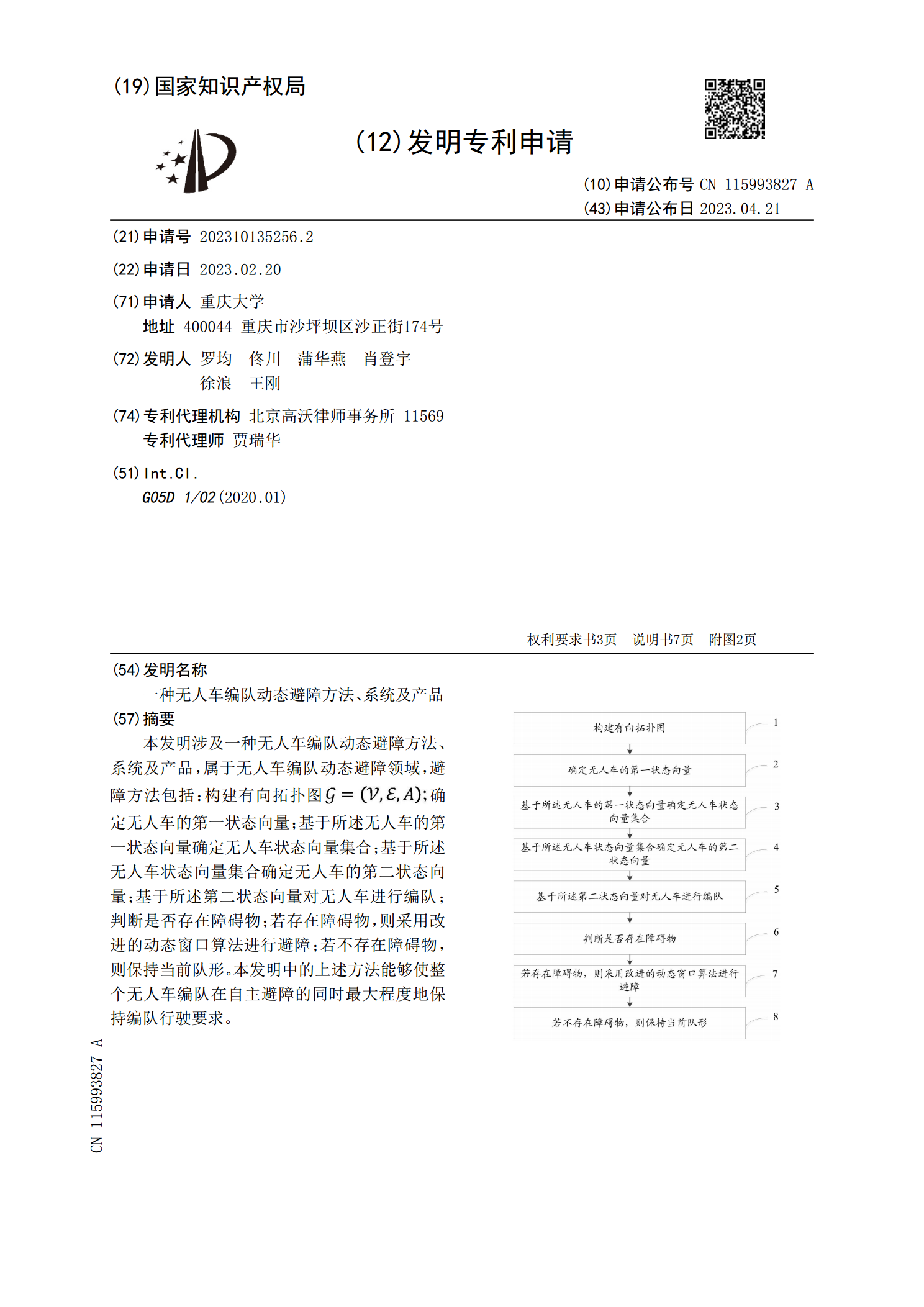
本发明涉及一种无人车编队动态避障方法、系统及产品,属于无人车编队动态避障领域,避障方法包括:构建有向拓扑图

一种多传感器融合的无人车探测避障系统及避障方法.pdf
本发明提供了一种多传感器融合的无人车探测避障系统及避障方法,该避障系统包括多个单线激光雷达、双CCD摄像机、微波雷达、前后方盲区超声波传感器组和基于ARM+FPGA+NUC的三核控制器;多个单线激光雷达信号处理由NUC微型电脑处理,CCD摄像机的双目视觉图形数据由ARM+FPGA控制器共同处理,而盲区探测和避障、人机界面、路径规划、在线输出等功能交给STM32F767单独完成,ARM+FPGA控制器通过解码输出控制信号精确控制直流无刷伺服电机,驱动无人车行驶。本发明使得无人车可以全天候较远地发现复杂环境下
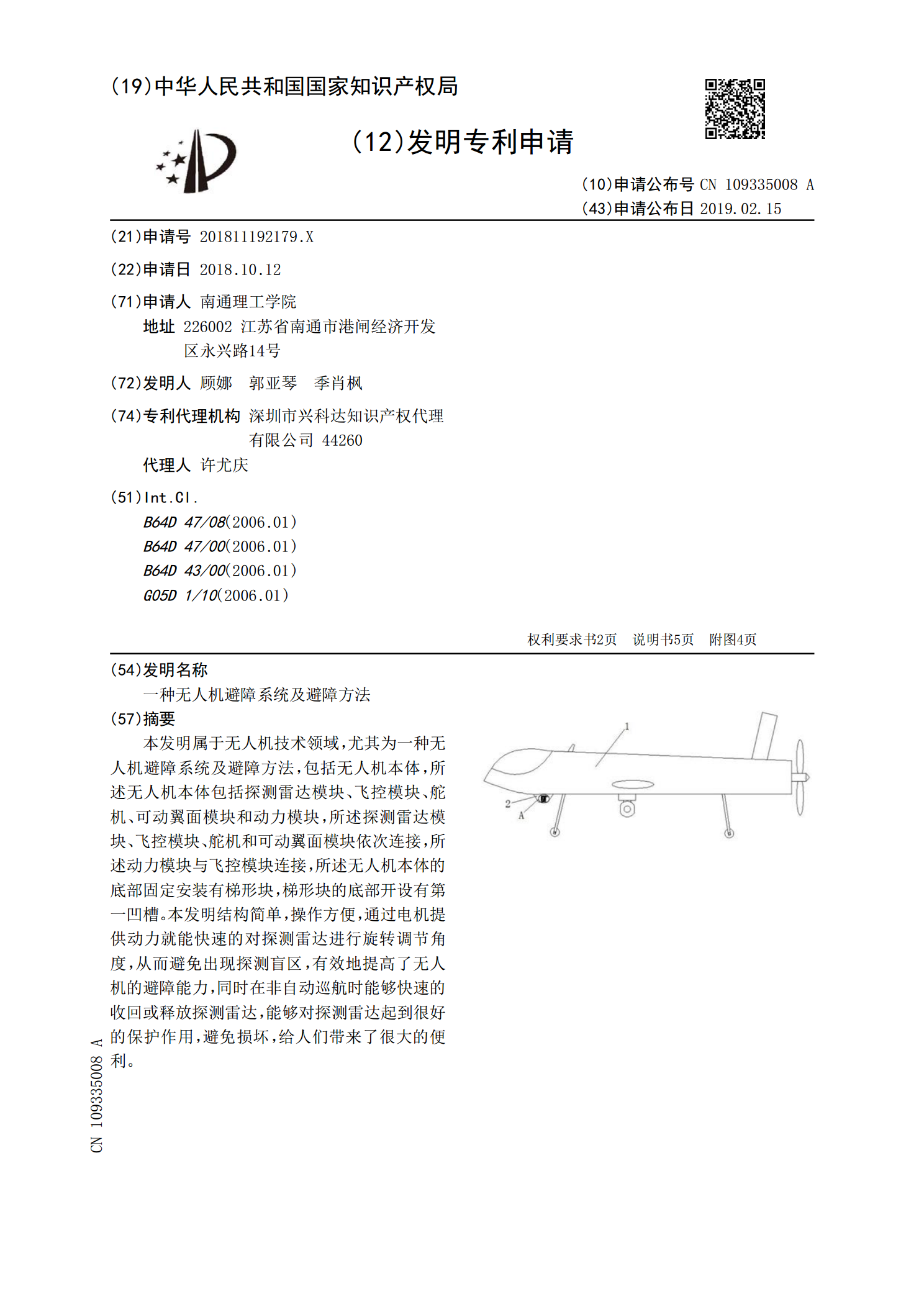
一种无人机避障系统及避障方法.pdf
本发明属于无人机技术领域,尤其为一种无人机避障系统及避障方法,包括无人机本体,所述无人机本体包括探测雷达模块、飞控模块、舵机、可动翼面模块和动力模块,所述探测雷达模块、飞控模块、舵机和可动翼面模块依次连接,所述动力模块与飞控模块连接,所述无人机本体的底部固定安装有梯形块,梯形块的底部开设有第一凹槽。本发明结构简单,操作方便,通过电机提供动力就能快速的对探测雷达进行旋转调节角度,从而避免出现探测盲区,有效地提高了无人机的避障能力,同时在非自动巡航时能够快速的收回或释放探测雷达,能够对探测雷达起到很好的保护作
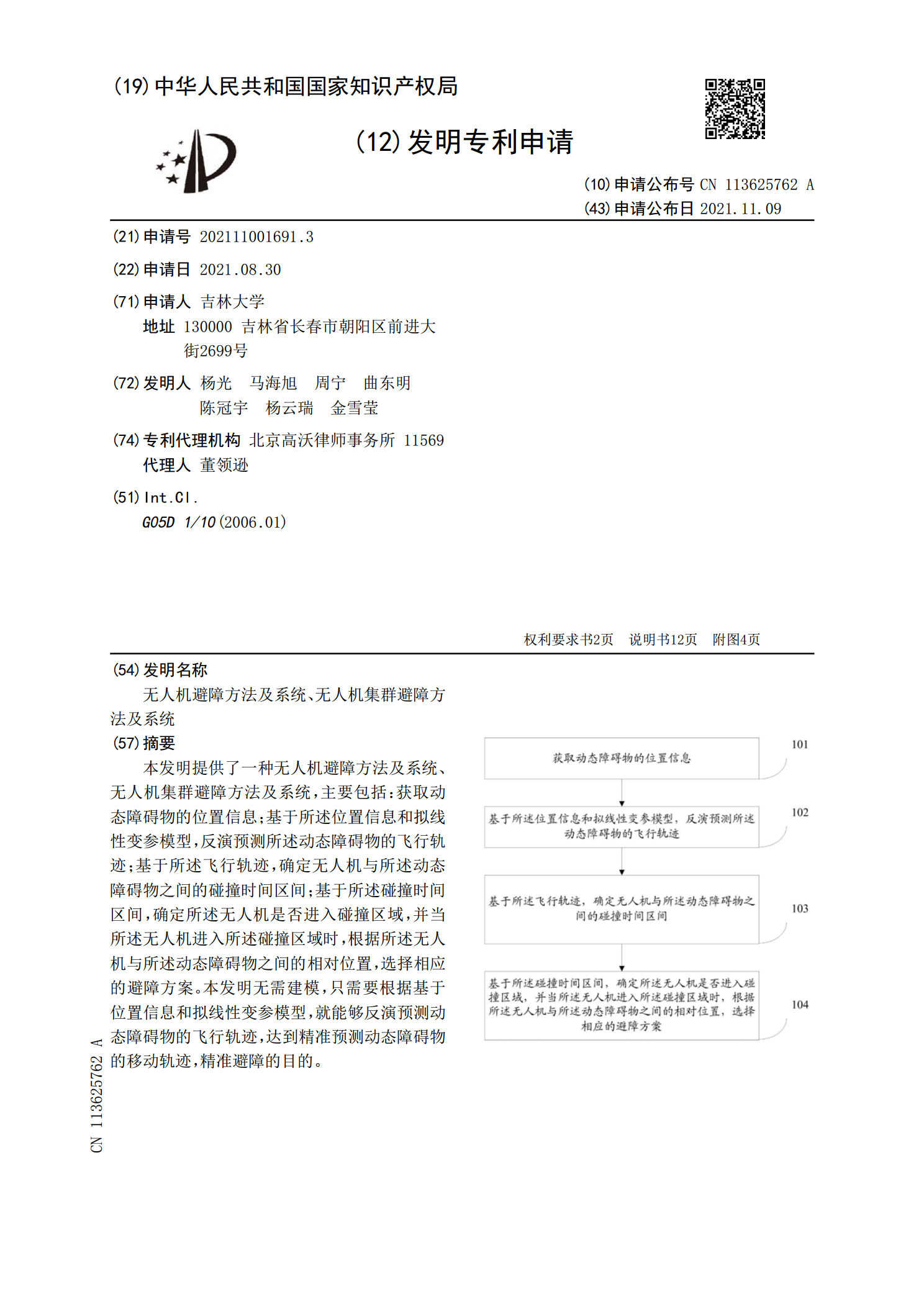
无人机避障方法及系统、无人机集群避障方法及系统.pdf
本发明提供了一种无人机避障方法及系统、无人机集群避障方法及系统,主要包括:获取动态障碍物的位置信息;基于所述位置信息和拟线性变参模型,反演预测所述动态障碍物的飞行轨迹;基于所述飞行轨迹,确定无人机与所述动态障碍物之间的碰撞时间区间;基于所述碰撞时间区间,确定所述无人机是否进入碰撞区域,并当所述无人机进入所述碰撞区域时,根据所述无人机与所述动态障碍物之间的相对位置,选择相应的避障方案。本发明无需建模,只需要根据基于位置信息和拟线性变参模型,就能够反演预测动态障碍物的飞行轨迹,达到精准预测动态障碍物的移动轨迹
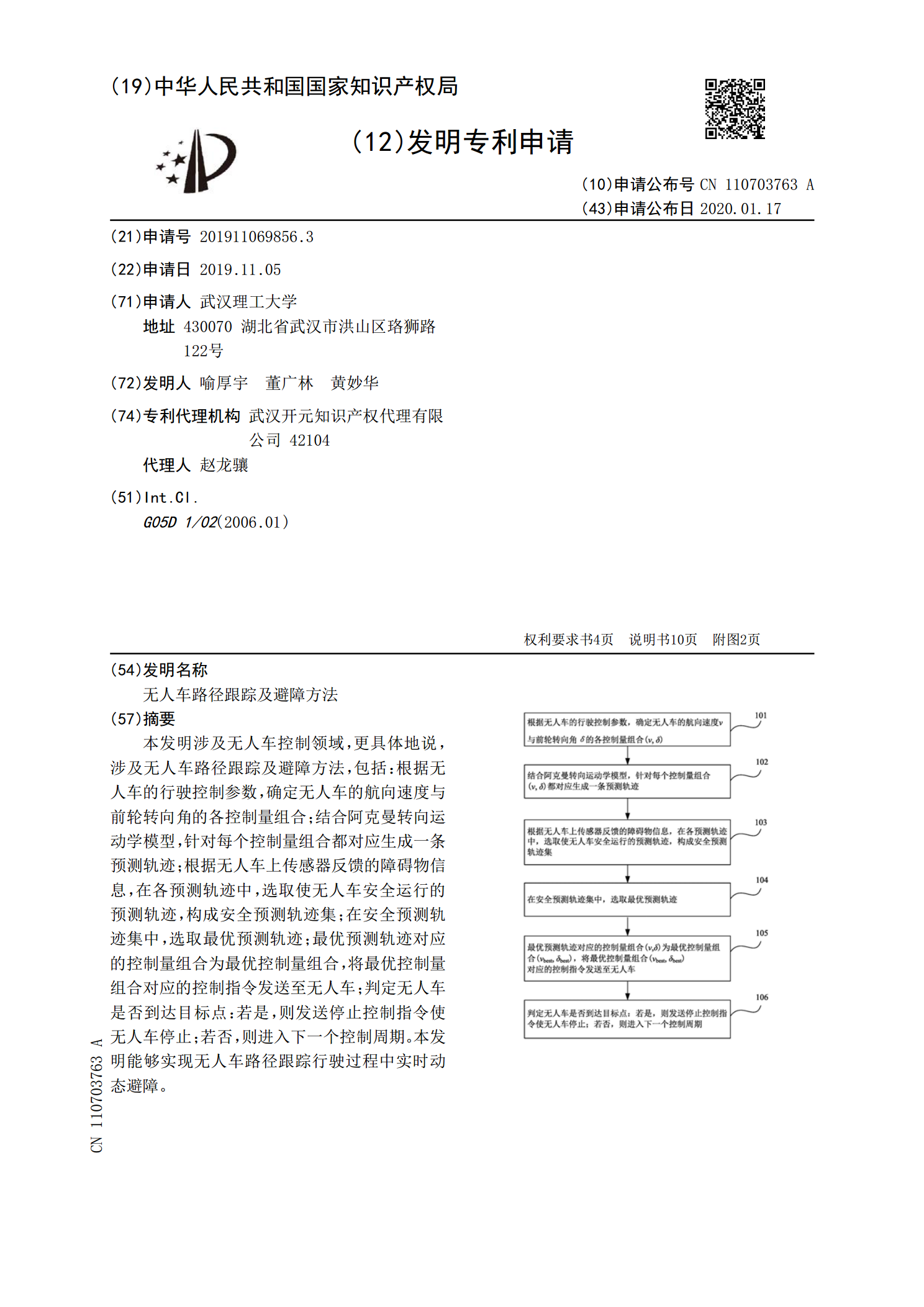
无人车路径跟踪及避障方法.pdf
本发明涉及无人车控制领域,更具体地说,涉及无人车路径跟踪及避障方法,包括:根据无人车的行驶控制参数,确定无人车的航向速度与前轮转向角的各控制量组合;结合阿克曼转向运动学模型,针对每个控制量组合都对应生成一条预测轨迹;根据无人车上传感器反馈的障碍物信息,在各预测轨迹中,选取使无人车安全运行的预测轨迹,构成安全预测轨迹集;在安全预测轨迹集中,选取最优预测轨迹;最优预测轨迹对应的控制量组合为最优控制量组合,将最优控制量组合对应的控制指令发送至无人车;判定无人车是否到达目标点:若是,则发送停止控制指令使无人车停止