
车辆定位方法、系统、设备及存储介质.pdf

Ja****20


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共26页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

车辆定位方法、系统、设备及存储介质.pdf
本发明提供了车辆定位方法、系统、设备及存储介质,其中,在车载端部署RTK定位系统和UWB定位系统,方法包括:利用RTK定位系统获取所在车辆的RTK定位观测值,利用UWB定位系统获取所在车辆的UWB定位观测值,获取RTK定位系统和UWB定位系统各自的置信度,在RTK定位观测值和UWB定位观测值中选择系统置信度满足设定条件的目标定位观测值,将目标定位观测值作为车端定位结果。本发明能够实现基于RTK‑UWB技术进行融合定位。在这种情况下,即使因为场景切换而导致系统误差的情况下,也可适时根据系统置信度选择误差较小
车辆定位方法、装置、设备及存储介质.pdf
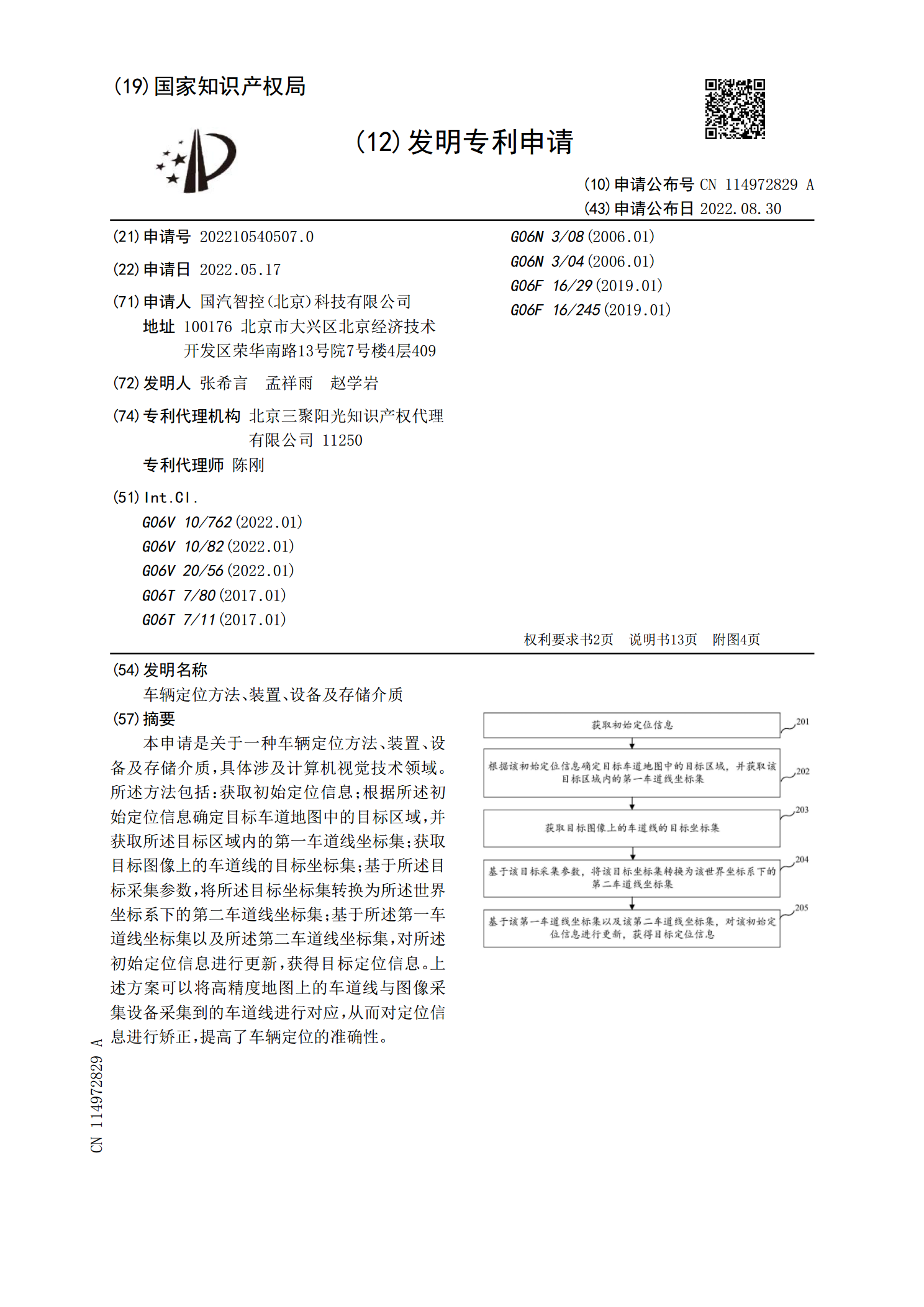
本申请是关于一种车辆定位方法、装置、设备及存储介质,具体涉及计算机视觉技术领域。所述方法包括:获取初始定位信息;根据所述初始定位信息确定目标车道地图中的目标区域,并获取所述目标区域内的第一车道线坐标集;获取目标图像上的车道线的目标坐标集;基于所述目标采集参数,将所述目标坐标集转换为所述世界坐标系下的第二车道线坐标集;基于所述第一车道线坐标集以及所述第二车道线坐标集,对所述初始定位信息进行更新,获得目标定位信息。上述方案可以将高精度地图上的车道线与图像采集设备采集到的车道线进行对应,从而对定位信息进行矫正,

一种车辆定位方法、装置、设备、系统及存储介质.pdf
本发明公开了一种车辆定位方法、装置、设备、系统及存储介质。该方法包括:向目标路侧设备发送定位请求信号,并控制车载设备的多个天线开启;通过各天线接收目标路侧设备发送的包含特征值的无线电波信号;根据同一时刻各天线接收到的无线电波信号中所包含的特征值和目标路侧设备的坐标确定车辆的位置。通过本发明的技术方案,能够解决现有的车载定位设备间精确校对时间困难,需要使用的路侧设备数量较多,容易引入测量误差的问题;实现只使用一个路侧设备对车辆进行定位,降低车辆定位计算的复杂度,减少测量误差,提高车辆定位精确度。

车辆的定位方法、系统、设备及计算机可读存储介质.pdf
本发明提供一种车辆的定位方法、系统、设备及计算机可读存储介质,定位方法包括:实时获取车辆于多个时刻的位姿;将实时获取的多个时刻的位姿定义为观测数据依次接收至预先构建的校正模型,其中,预设校正模型包括若干用于预测车辆位姿的滤波器;在当前时刻预先构建的校正模型接收到第i+1个观测数据时,对前i个滤波器分别进行融合检测,若前i个滤波器中的滤波器检测通过,则利用第i+1个观测数据,更新检测通过的滤波器,并提取出校正后的车辆于当前时刻的位姿;第i+1个观测数据非第一个观测数据。本发明适用于任何有车位号的停车场,且通
车辆的定位方法、系统、设备及计算机可读存储介质.pdf
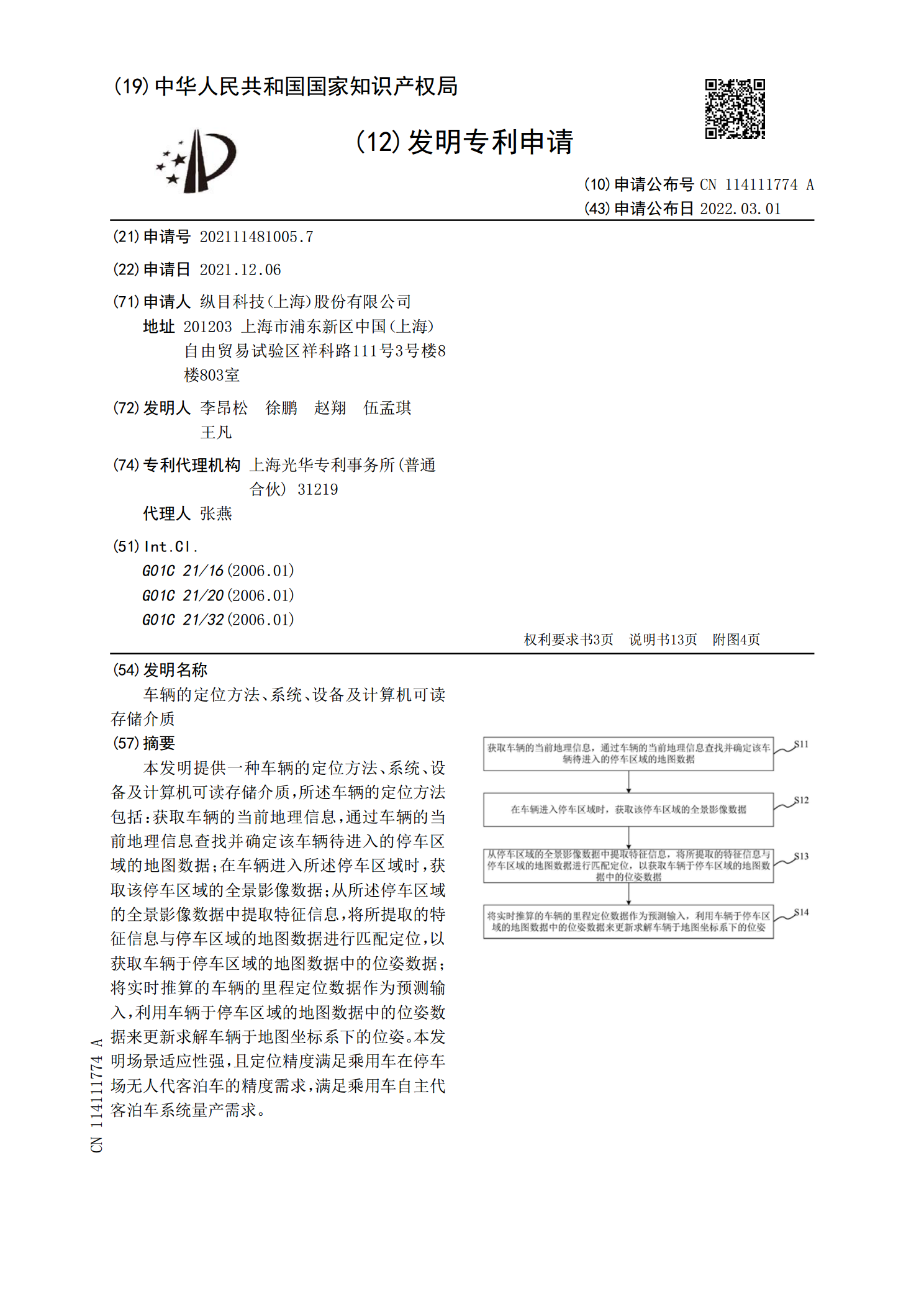
本发明提供一种车辆的定位方法、系统、设备及计算机可读存储介质,所述车辆的定位方法包括:获取车辆的当前地理信息,通过车辆的当前地理信息查找并确定该车辆待进入的停车区域的地图数据;在车辆进入所述停车区域时,获取该停车区域的全景影像数据;从所述停车区域的全景影像数据中提取特征信息,将所提取的特征信息与停车区域的地图数据进行匹配定位,以获取车辆于停车区域的地图数据中的位姿数据;将实时推算的车辆的里程定位数据作为预测输入,利用车辆于停车区域的地图数据中的位姿数据来更新求解车辆于地图坐标系下的位姿。本发明场景适应性强