
穿墙雷达成像方法、系统、终端设备及可读存储介质.pdf

Jo****34


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

穿墙雷达成像方法、系统、终端设备及可读存储介质.pdf
本发明提供了一种穿墙雷达成像方法、系统、终端设备及可读存储介质,该方法包括:获取预设雷达探测场景中的雷达回波数据,对预设雷达探测场景中的成像场景进行离散化;根据成像场景的离散化结果构建字典矩阵,根据字典矩阵构建低秩稀疏信号模型;确定低秩稀疏信号模型中的低秩稀疏优化问题,根据确定到的低秩稀疏优化问题构建穿墙雷达成像模型;对穿墙雷达成像模型进行模型训练,直至穿墙雷达成像模型收敛,将待成像回波数据输入收敛后的穿墙雷达成像模型进行成像分析,得到重建图像。本发明将墙体的杂波抑制和目标图像重建问题转化为求解低秩稀疏优
雷达成像方法、装置及计算机可读存储介质.pdf
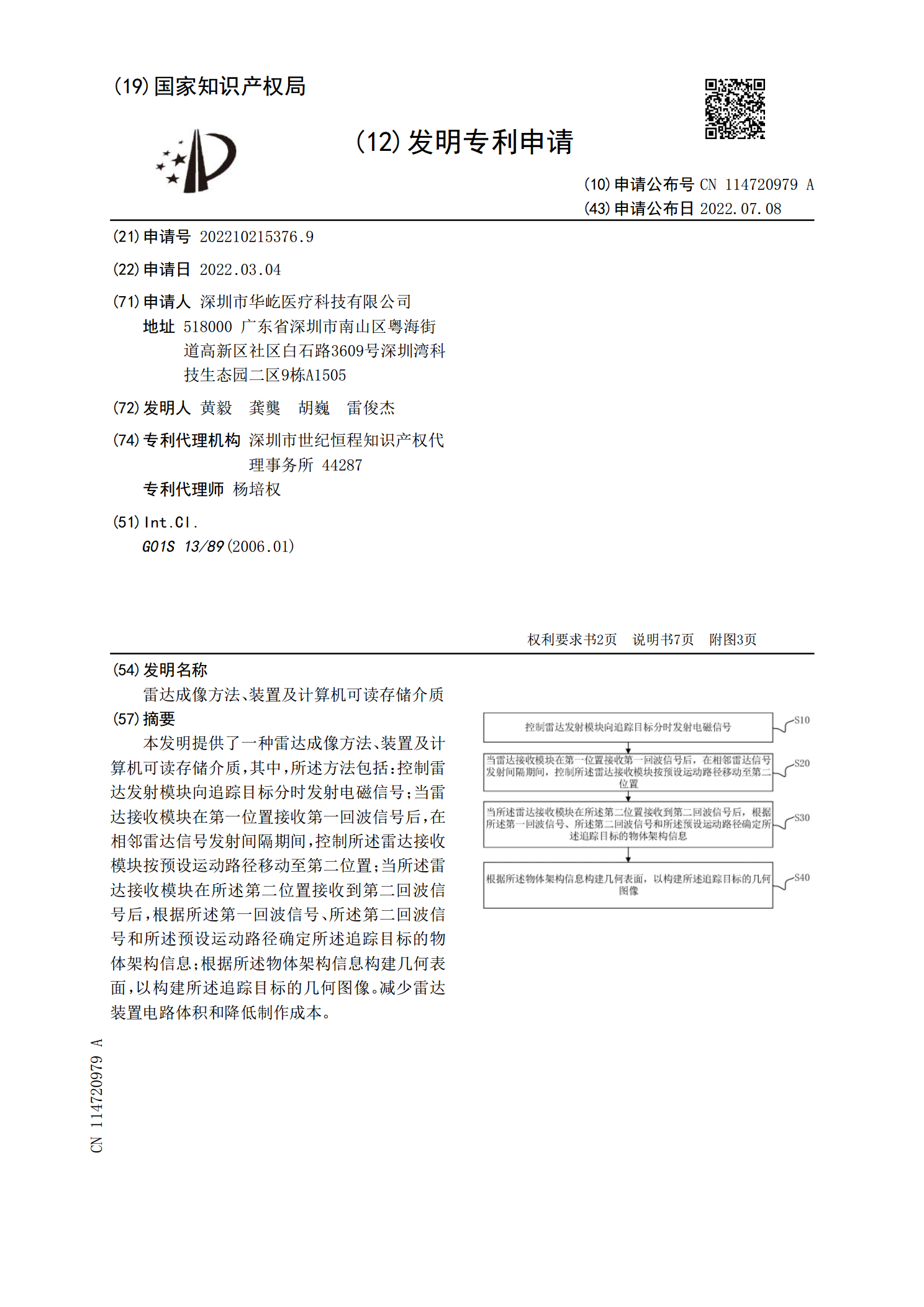
本发明提供了一种雷达成像方法、装置及计算机可读存储介质,其中,所述方法包括:控制雷达发射模块向追踪目标分时发射电磁信号;当雷达接收模块在第一位置接收第一回波信号后,在相邻雷达信号发射间隔期间,控制所述雷达接收模块按预设运动路径移动至第二位置;当所述雷达接收模块在所述第二位置接收到第二回波信号后,根据所述第一回波信号、所述第二回波信号和所述预设运动路径确定所述追踪目标的物体架构信息;根据所述物体架构信息构建几何表面,以构建所述追踪目标的几何图像。减少雷达装置电路体积和降低制作成本。
雷达控制方法、装置、终端设备及计算机可读存储介质.pdf
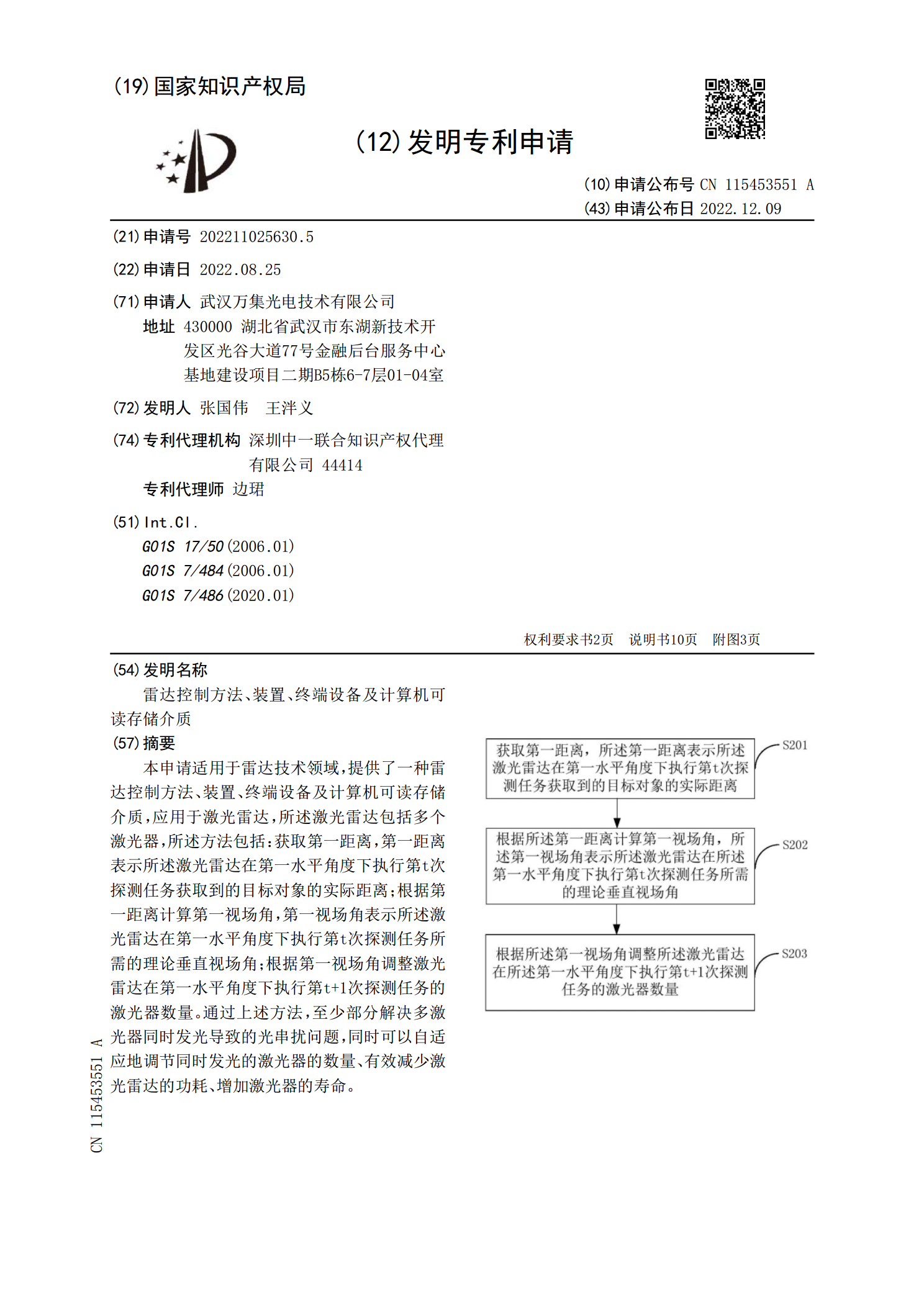
本申请适用于雷达技术领域,提供了一种雷达控制方法、装置、终端设备及计算机可读存储介质,应用于激光雷达,所述激光雷达包括多个激光器,所述方法包括:获取第一距离,第一距离表示所述激光雷达在第一水平角度下执行第t次探测任务获取到的目标对象的实际距离;根据第一距离计算第一视场角,第一视场角表示所述激光雷达在第一水平角度下执行第t次探测任务所需的理论垂直视场角;根据第一视场角调整激光雷达在第一水平角度下执行第t+1次探测任务的激光器数量。通过上述方法,至少部分解决多激光器同时发光导致的光串扰问题,同时可以自适应地调
噪声评价预测方法、系统、终端设备及可读存储介质.pdf
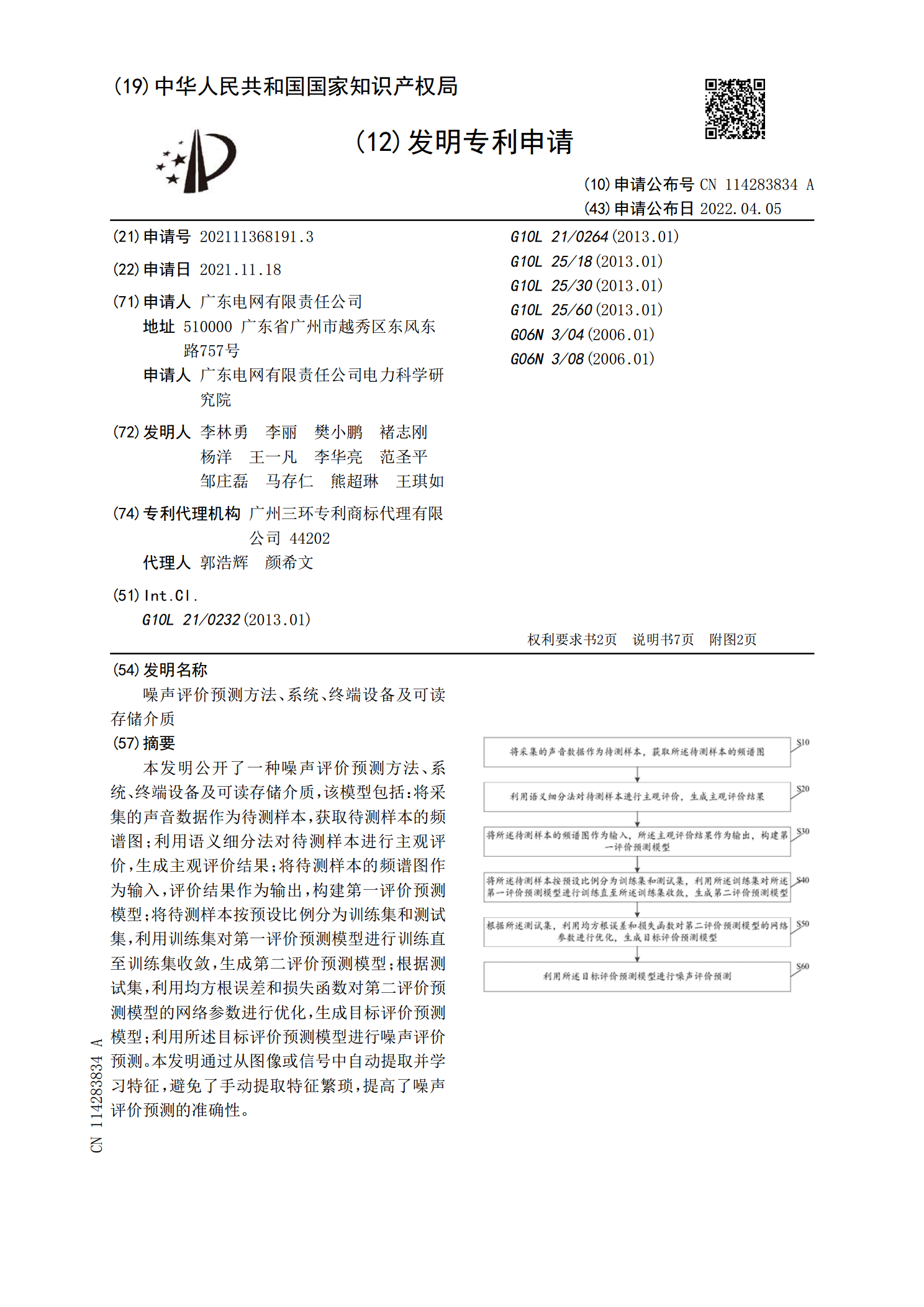
本发明公开了一种噪声评价预测方法、系统、终端设备及可读存储介质,该模型包括:将采集的声音数据作为待测样本,获取待测样本的频谱图;利用语义细分法对待测样本进行主观评价,生成主观评价结果;将待测样本的频谱图作为输入,评价结果作为输出,构建第一评价预测模型;将待测样本按预设比例分为训练集和测试集,利用训练集对第一评价预测模型进行训练直至训练集收敛,生成第二评价预测模型;根据测试集,利用均方根误差和损失函数对第二评价预测模型的网络参数进行优化,生成目标评价预测模型;利用所述目标评价预测模型进行噪声评价预测。本发明
车辆制动提示方法、系统、终端设备及可读存储介质.pdf
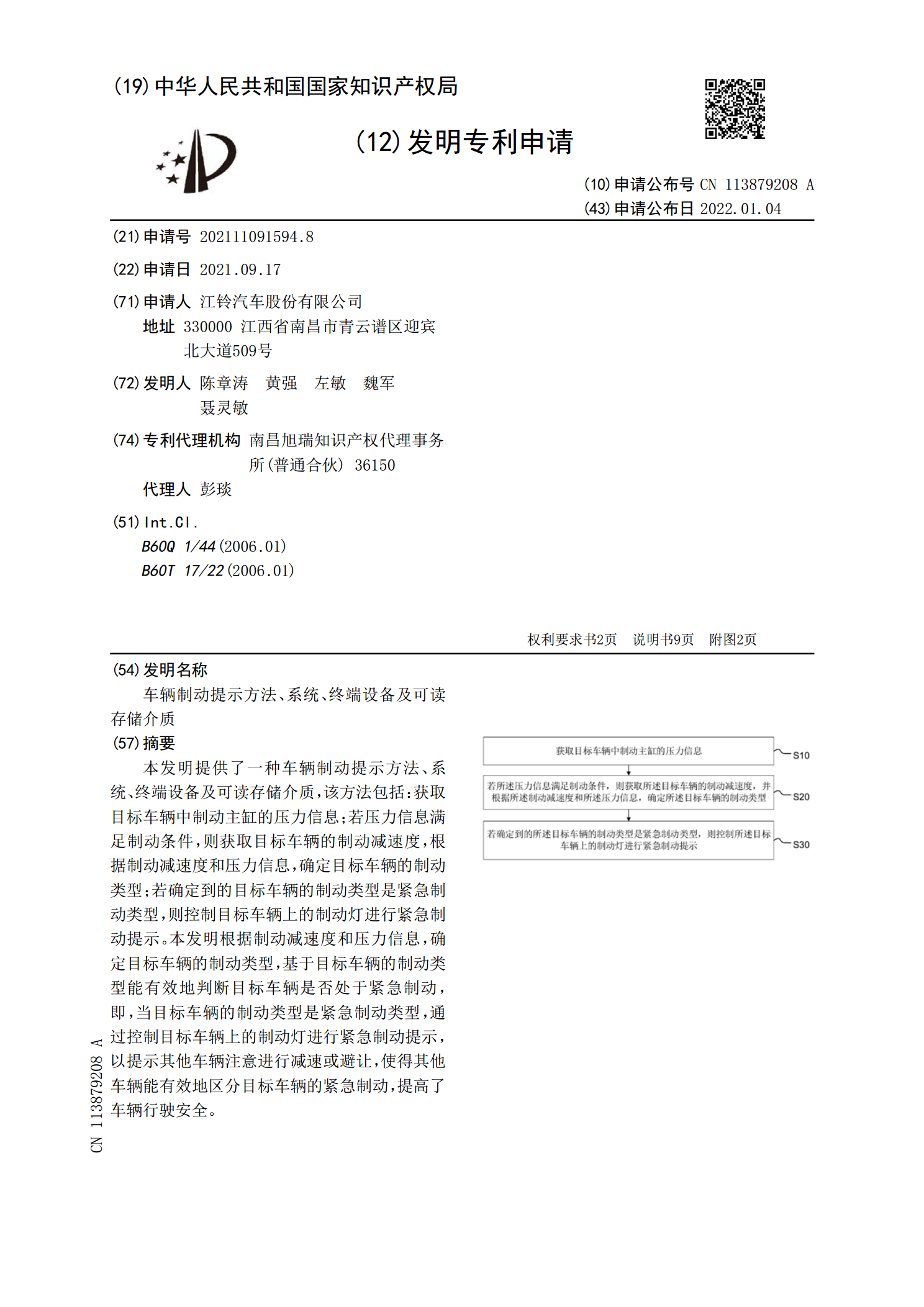
本发明提供了一种车辆制动提示方法、系统、终端设备及可读存储介质,该方法包括:获取目标车辆中制动主缸的压力信息;若压力信息满足制动条件,则获取目标车辆的制动减速度,根据制动减速度和压力信息,确定目标车辆的制动类型;若确定到的目标车辆的制动类型是紧急制动类型,则控制目标车辆上的制动灯进行紧急制动提示。本发明根据制动减速度和压力信息,确定目标车辆的制动类型,基于目标车辆的制动类型能有效地判断目标车辆是否处于紧急制动,即,当目标车辆的制动类型是紧急制动类型,通过控制目标车辆上的制动灯进行紧急制动提示,以提示其他车