
一种旋翼无人机视觉着舰引导方法与系统.pdf

和裕****az

1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种旋翼无人机视觉着舰引导方法与系统.pdf
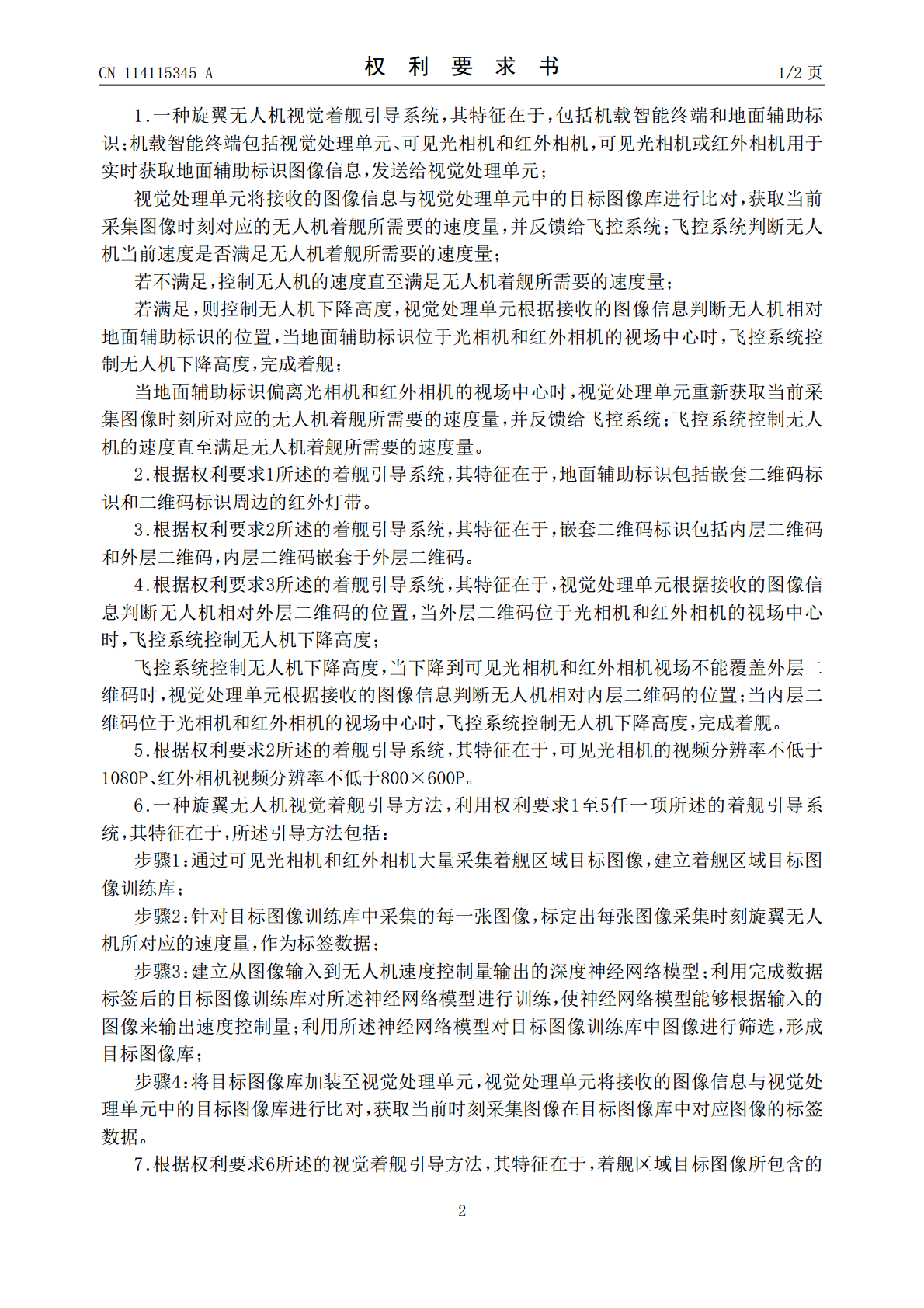
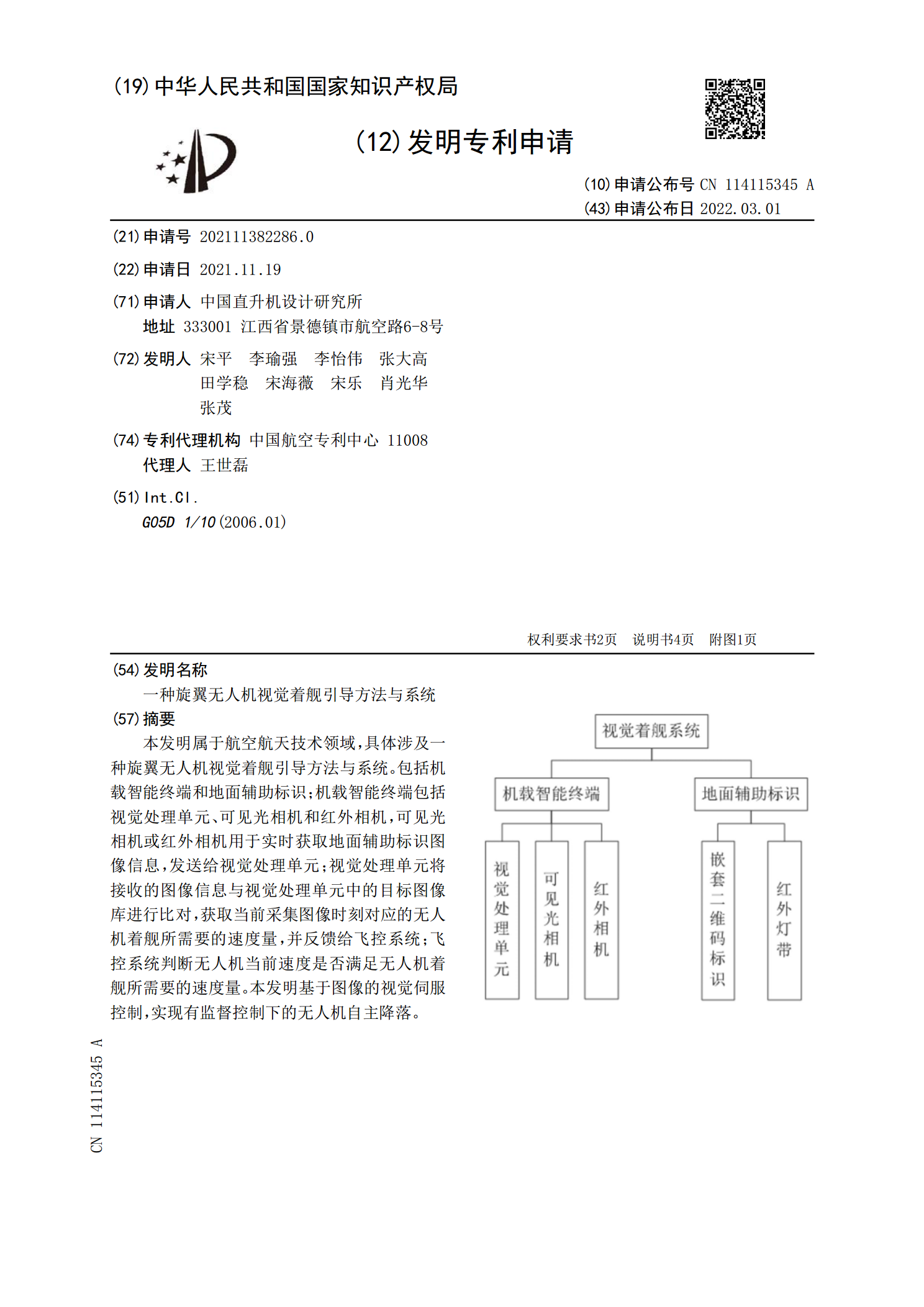
本发明属于航空航天技术领域,具体涉及一种旋翼无人机视觉着舰引导方法与系统。包括机载智能终端和地面辅助标识;机载智能终端包括视觉处理单元、可见光相机和红外相机,可见光相机或红外相机用于实时获取地面辅助标识图像信息,发送给视觉处理单元;视觉处理单元将接收的图像信息与视觉处理单元中的目标图像库进行比对,获取当前采集图像时刻对应的无人机着舰所需要的速度量,并反馈给飞控系统;飞控系统判断无人机当前速度是否满足无人机着舰所需要的速度量。本发明基于图像的视觉伺服控制,实现有监督控制下的无人机自主降落。

一种无人机旋翼、旋翼的组装方法和旋翼式无人机.pdf
本发明涉及一种无人机旋翼和旋翼式无人机,无人机机身上开设安装槽,安装槽的上方固定连接槽盖,槽盖上方设置有桨叶,安装槽内部设置有内齿环、外齿盘和电机,内齿环固定于安装槽的内底壁,内齿环的内表面啮合有外齿盘,外齿盘的上表面固定有电机,电机的输出端向上连接旋转轴,槽盖中心位置开设中心孔,桨叶具有向下的连接轴,连接轴下端穿过中心孔,连接轴下端内部开设有连接槽,旋转轴插入连接槽中,连接轴上部和旋转轴内部开设大小相同的内螺纹槽,高强度螺栓由上至下穿过连接轴和旋转轴,上端以螺母锁定。本发明较好地解决了无人机机身和旋翼之
一种多旋翼无人机反制方法及系统.pdf
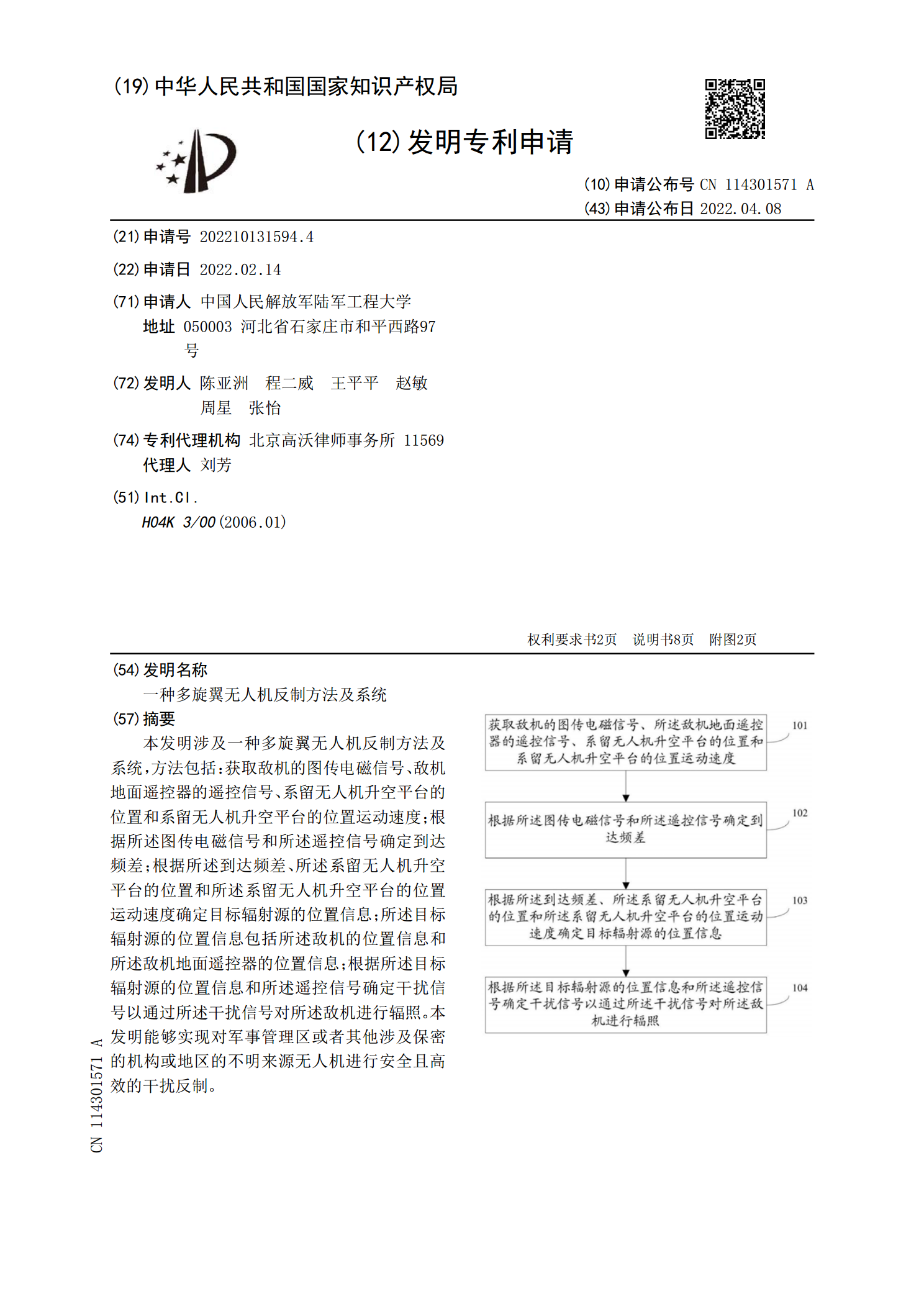
本发明涉及一种多旋翼无人机反制方法及系统,方法包括:获取敌机的图传电磁信号、敌机地面遥控器的遥控信号、系留无人机升空平台的位置和系留无人机升空平台的位置运动速度;根据所述图传电磁信号和所述遥控信号确定到达频差;根据所述到达频差、所述系留无人机升空平台的位置和所述系留无人机升空平台的位置运动速度确定目标辐射源的位置信息;所述目标辐射源的位置信息包括所述敌机的位置信息和所述敌机地面遥控器的位置信息;根据所述目标辐射源的位置信息和所述遥控信号确定干扰信号以通过所述干扰信号对所述敌机进行辐照。本发明能够实现对军事

一种用于旋翼无人机姿态模拟系统及方法.pdf
本发明属于无人机仿真/测试装置技术领域,公开了一种用于旋翼无人机姿态模拟系统及方法;设置有:回转内环;回转内环通过螺栓与支撑装置连接,回转内环位于回转外环内部,回转内环与回转外环组成类似轴承的结构,可以相对转动;回转外环通过螺栓与转动装置底座通过螺钉连接,V型滑轮通过固定螺钉固定在转动装置底座,导轨座上下两侧均固定有V型滑轮,用于夹持导轨座。本发明可以实现旋翼无人机三个旋转自由度的模拟,且三个自由度的转动中心相重合,即实现无人机的偏航、俯仰、翻转三种飞行姿态的模拟。三个旋转自由度的运动模拟通过三个转动装置

一种双引擎旋翼无人机系统.pdf
本发明涉及无人驾驶航空飞行器领域,特别是一种双引擎旋翼无人机系统。本发明的一种双引擎旋翼无人机系统由动力传动系统(1)、旋翼系统(2)、机身(3)、飞行控制系统(4)、电力供应及分配系统(5)、地面控制中心(6)和通信链路系统(7)组成,动力传动系统(1)包括两个引擎(101)和主齿轮箱(102),两个引擎(101)同步驱动主齿轮箱(102)和旋翼系统(2),在一个引擎(101)不工作时,另一个引擎(101)仍可独立驱动主齿轮箱(102)和旋翼系统(2),保障无人机系统的正常运转。本发明的有益效果在于:极