
一种基于毫米波雷达点云聚类方法及装置.pdf

书生****文章

1/10

2/10
3/10
4/10

5/10

6/10

7/10
8/10
9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于毫米波雷达点云聚类方法及装置.pdf
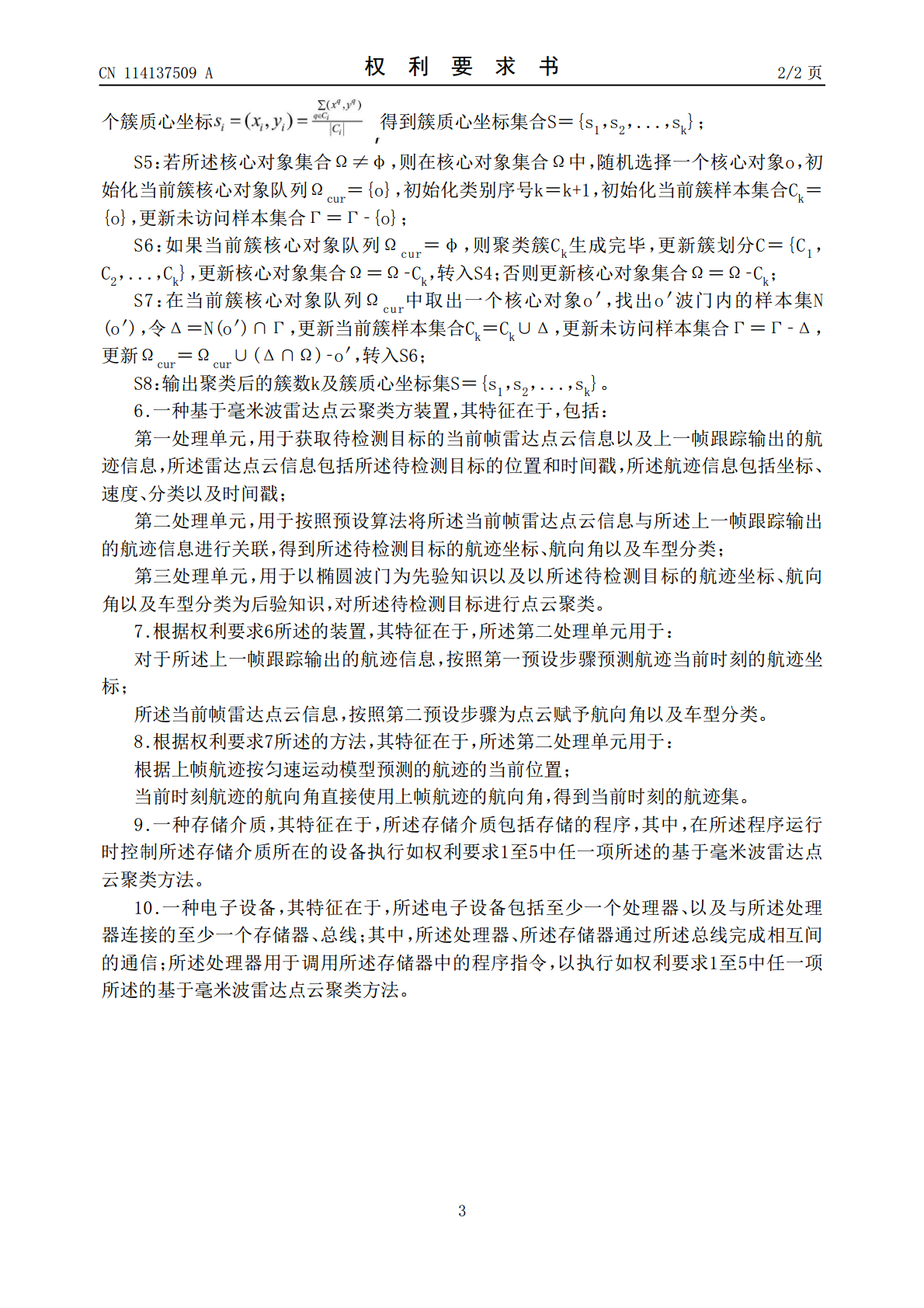
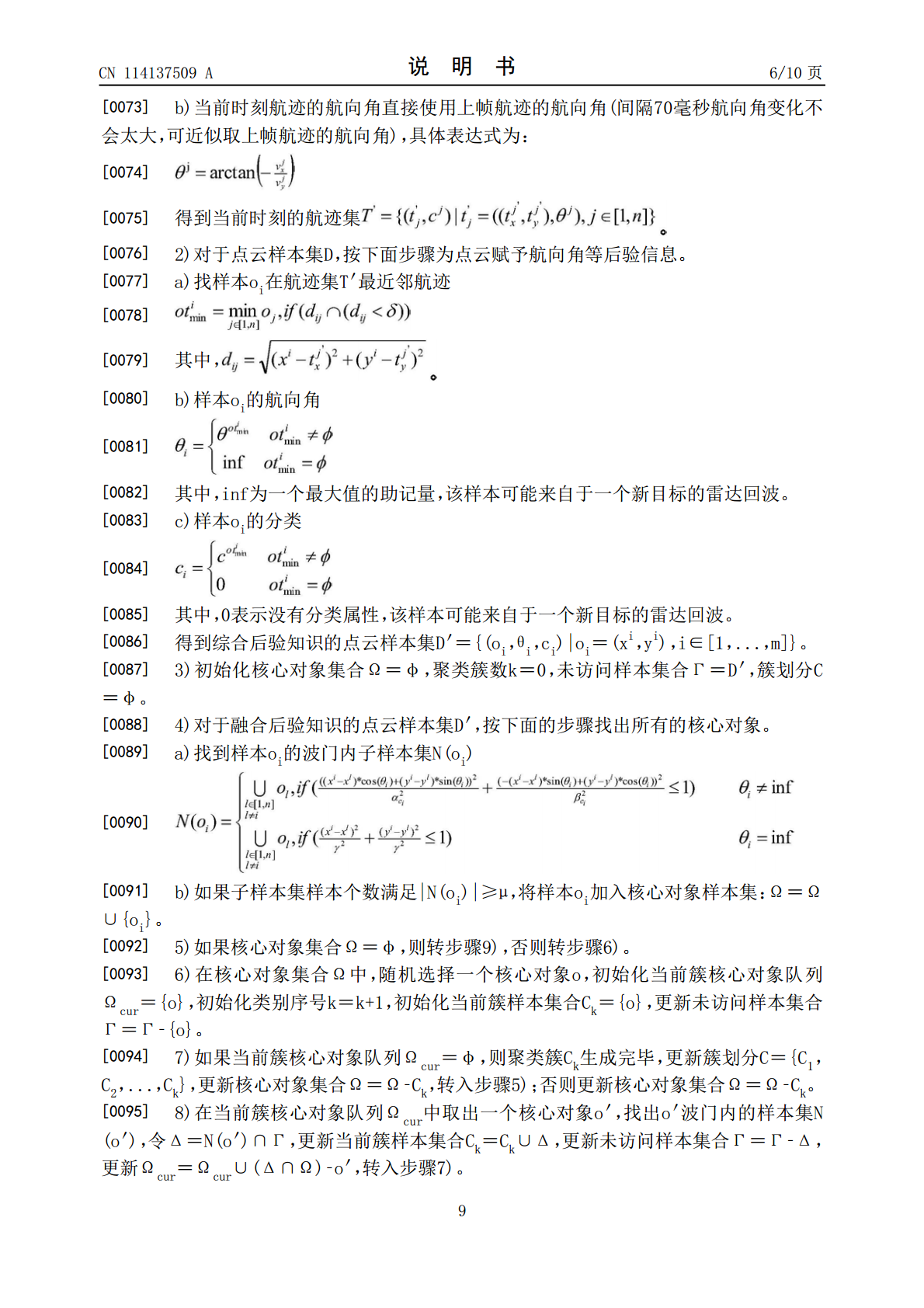
本申请提供一种基于毫米波雷达点云聚类方法及装置,通过获取待检测目标的当前帧雷达点云信息以及上一帧跟踪输出的航迹信息;然后按照预设算法将所述当前帧雷达点云信息与所述上一帧跟踪输出的航迹信息进行关联,得到所述待检测目标的航迹坐标、航向角以及车型分类;最后以椭圆波门为先验知识以及以所述待检测目标的航迹坐标、航向角以及车型分类为后验知识,对所述待检测目标进行点云聚类。本申请根据车辆为长方形这一先验知识,把聚类中核心对象计算所用的波门设定为椭圆,点云样本通过关联航迹获得航向角和车型分类,再通过航向角和车型分类改变椭
一种基于毫米波雷达点云的步态识别方法.pdf
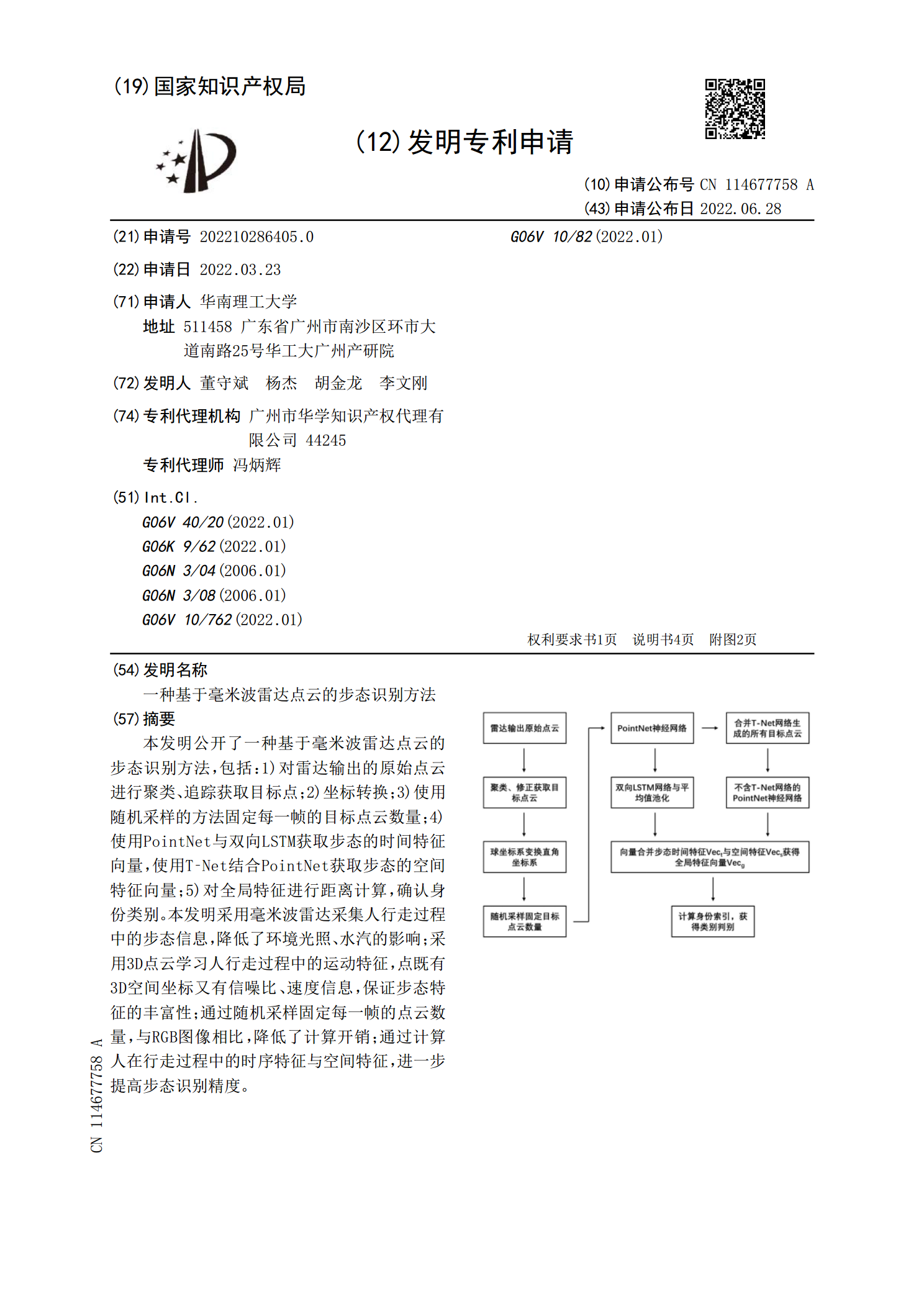
本发明公开了一种基于毫米波雷达点云的步态识别方法,包括:1)对雷达输出的原始点云进行聚类、追踪获取目标点;2)坐标转换;3)使用随机采样的方法固定每一帧的目标点云数量;4)使用PointNet与双向LSTM获取步态的时间特征向量,使用T?Net结合PointNet获取步态的空间特征向量;5)对全局特征进行距离计算,确认身份类别。本发明采用毫米波雷达采集人行走过程中的步态信息,降低了环境光照、水汽的影响;采用3D点云学习人行走过程中的运动特征,点既有3D空间坐标又有信噪比、速度信息,保证步态特征的丰富性;通
一种基于图结构的点云聚类GPU优化方法及装置.pdf
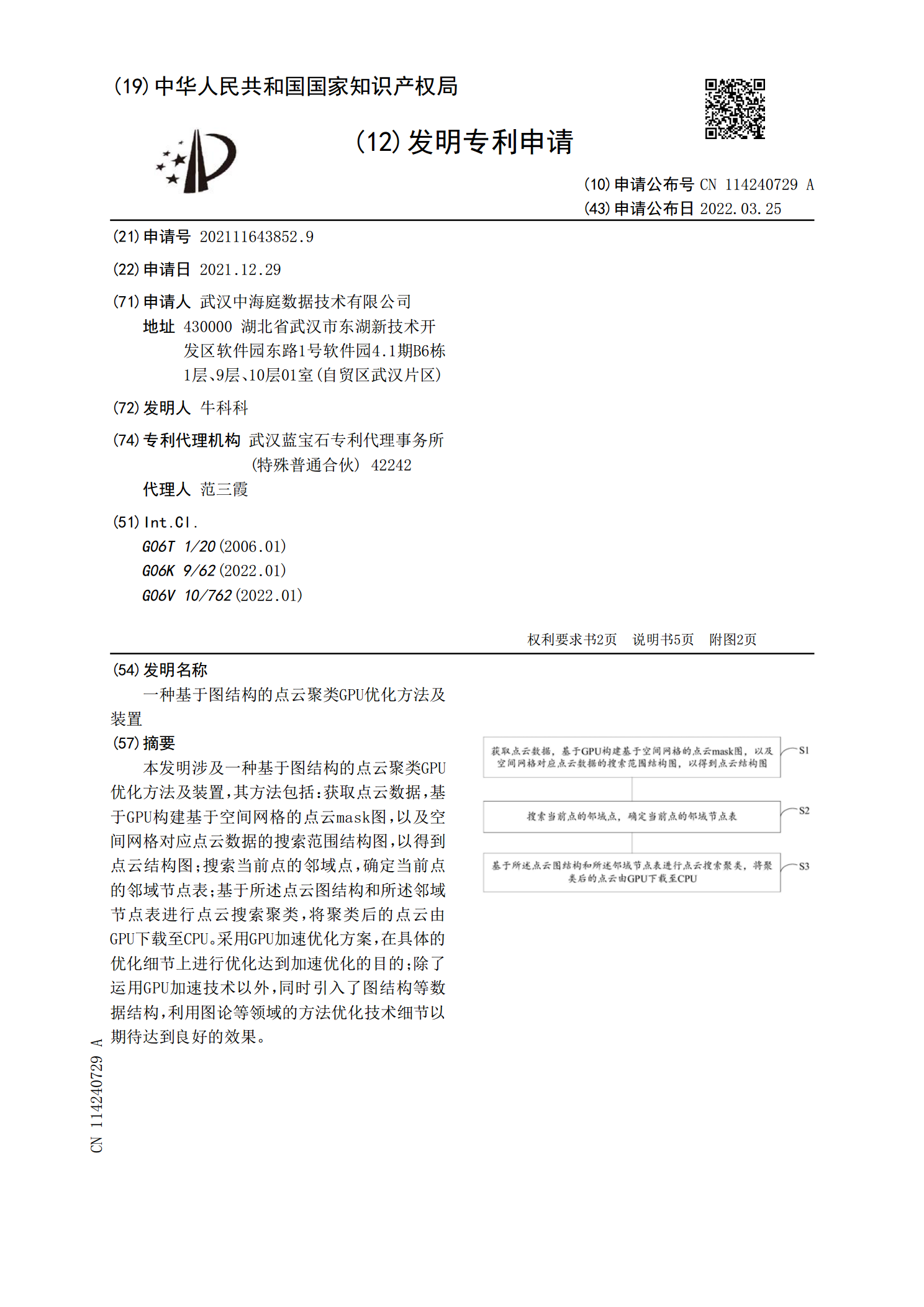
本发明涉及一种基于图结构的点云聚类GPU优化方法及装置,其方法包括:获取点云数据,基于GPU构建基于空间网格的点云mask图,以及空间网格对应点云数据的搜索范围结构图,以得到点云结构图;搜索当前点的邻域点,确定当前点的邻域节点表;基于所述点云图结构和所述邻域节点表进行点云搜索聚类,将聚类后的点云由GPU下载至CPU。采用GPU加速优化方案,在具体的优化细节上进行优化达到加速优化的目的;除了运用GPU加速技术以外,同时引入了图结构等数据结构,利用图论等领域的方法优化技术细节以期待达到良好的效果。

一种基于DBSCAN聚类的雷达点迹处理方法.pptx
汇报人:/目录0102算法原理算法特点算法应用场景03雷达点迹的来源雷达点迹处理的意义雷达点迹处理的方法04数据预处理聚类过程聚类结果评估聚类结果应用05方法优势局限性分析改进方向06应用实例介绍效果评估方法效果评估结果结果分析07与传统聚类方法的比较与其他现代聚类方法的比较优缺点对比汇报人:

一种机载毫米波测云雷达地杂波抑制方法、装置及雷达.pdf
本公开实施例提供了一种机载毫米波测云雷达地杂波抑制方法、装置及机载毫米波测云雷达,属于雷达技术领域。包括:获取机载毫米波测云雷达的回波信号及其对应的距离‑多普勒谱;获取地杂波的距离分布区域;估计所述地杂波距离分布区域内每个距离门的多普勒频率中心;根据每个所述距离门的多普勒频率中心,在所述回波信号的距离‑多普勒谱中估计所述距离门内地杂波的频率门范围;剔除所述频率门范围内的地杂波。提取当前条件下地杂波出现的距离范围,对该范围内的数据进行地杂波多普勒中心和宽度估计,将地杂波多普勒宽度范围内的数据进行剔除,该方法