
一种基于DBSCAN聚类的雷达点迹处理方法.pptx

快乐****蜜蜂


1/10

2/10
3/10

4/10
5/10

6/10

7/10

8/10

9/10
10/10
亲,该文档总共30页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种基于DBSCAN聚类的雷达点迹处理方法.pptx
汇报人:/目录0102算法原理算法特点算法应用场景03雷达点迹的来源雷达点迹处理的意义雷达点迹处理的方法04数据预处理聚类过程聚类结果评估聚类结果应用05方法优势局限性分析改进方向06应用实例介绍效果评估方法效果评估结果结果分析07与传统聚类方法的比较与其他现代聚类方法的比较优缺点对比汇报人:

基于DBSCAN的4D毫米波雷达聚类方法及存储介质.pdf
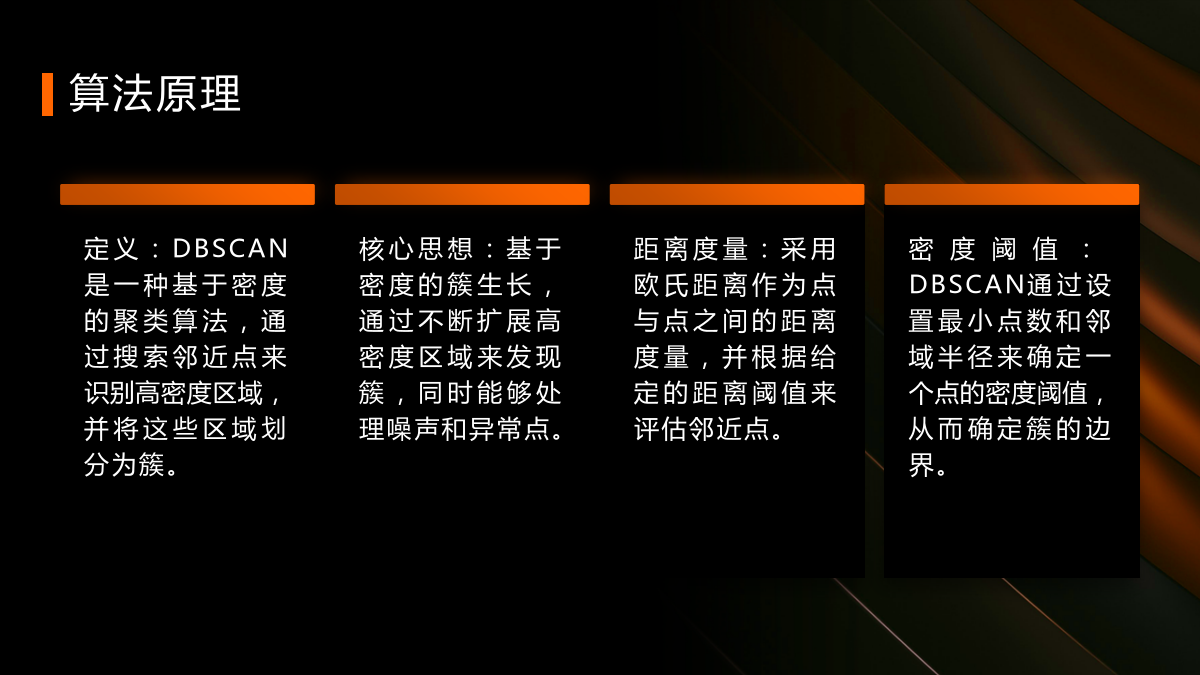
本发明公开了一种基于DBSCAN的4D毫米波雷达聚类方法及存储介质,包括以下步骤,S1、获取本车信号、车道线信号及4D毫米波雷达点云信号,并对该信号进行解析和预处理;S2、计算点云信号中各点的局部搜索半径,并对计算得到的各点局部搜索半径进行排序;S3、对点云信号进行基于DBSCAN算法的聚类处理。本发明以传统DBSCAN算法为基础,在其中添加了基于其他传感器以及各个点的物理属性进行数据预处理、对每一个点云依据其物理量的大小为其确定了局部搜索半径ε并对所有原始探测进行排序再进行聚类以及对聚类结果点数进行动态

一种基于峰值聚类的目标检测点迹凝聚方法.pdf
本发明公开了一种基于峰值聚类的目标检测点迹凝聚方法,涉及信号与信息处理技术领域,该算法考虑了CFAR检测点迹结果中同一类别的数据点向峰值点聚集的特点,同时该算法还考虑了CFAR检测点迹结果中不同类别的数据点有明显的差距的特点。该算法基于自动寻找峰值数据点的峰值聚类的点迹凝聚算法,通过采样CFAR检测结果的点迹数据,对采集的所有数据根据距离‑多普勒二维信息计算欧式距离,利用幅度信息寻找每一类别的峰值数据点进而进行聚类,能够克服彼此相邻、点迹数据幅度和密度分布差异较大的多个目标难以正确分类的难点,在不增加硬件

一种基于轮廓跟踪的雷达点迹凝聚方法.pdf
本发明公开了一种基于轮廓跟踪的雷达点迹凝聚方法,解决了逐行扫描数据导致耗时高的问题。其实现包括,输入雷达信息;确定雷达方位采样跨度,对输入视频数据按跨度方位采样;遍历跨方位上的采样点,找到有检测位标志的数据单元;对确定的有检测位标志的数据单元进行轮廓跟踪;用区域生长法获取搜索轮廓内的所有数据单元;进行点迹凝聚处理,完成雷达视频数据中目标点迹凝聚。本发明一改逐行扫描工作模式,跨方位采样结合轮廓跟踪、区域生长法构成一种快速查找目标的点迹凝聚方法,只需遍历数据中很小一部分,找出感兴趣目标,节省了大量计算,理论与

一种基于二次雷达询问机点迹数据容错处理的方法.docx
一种基于二次雷达询问机点迹数据容错处理的方法标题:一种基于二次雷达询问机点迹数据容错处理的方法摘要:在二次雷达系统中,询问机点迹数据的准确性对于实现高精度定位和导航至关重要。然而,在实际应用中,由于多种因素的干扰,例如信号反射、多径效应等,会导致点迹数据的误差。为了提高数据处理的容错性,本文提出了一种基于二次雷达询问机点迹数据容错处理的方法。该方法通过多传感器融合和滤波算法改善数据质量,并引入容错机制,从而提高点迹数据的准确性和可靠性。关键词:二次雷达、点迹数据、容错处理、多传感器融合、滤波算法1.引言二