
一种基于毫米波雷达点云的步态识别方法.pdf

高格****gu


1/8
2/8
3/8
4/8
5/8
6/8
7/8
8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于毫米波雷达点云的步态识别方法.pdf
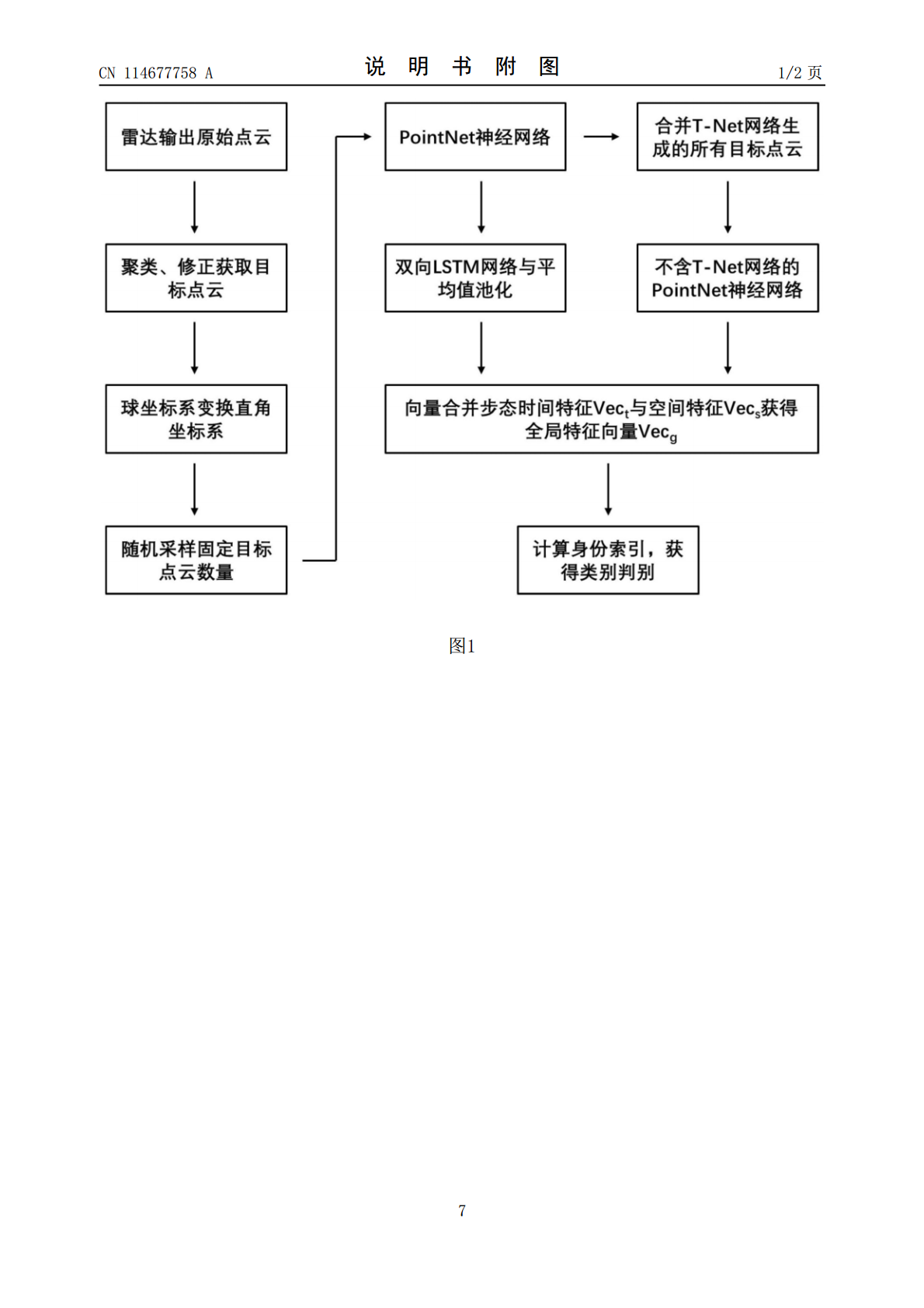
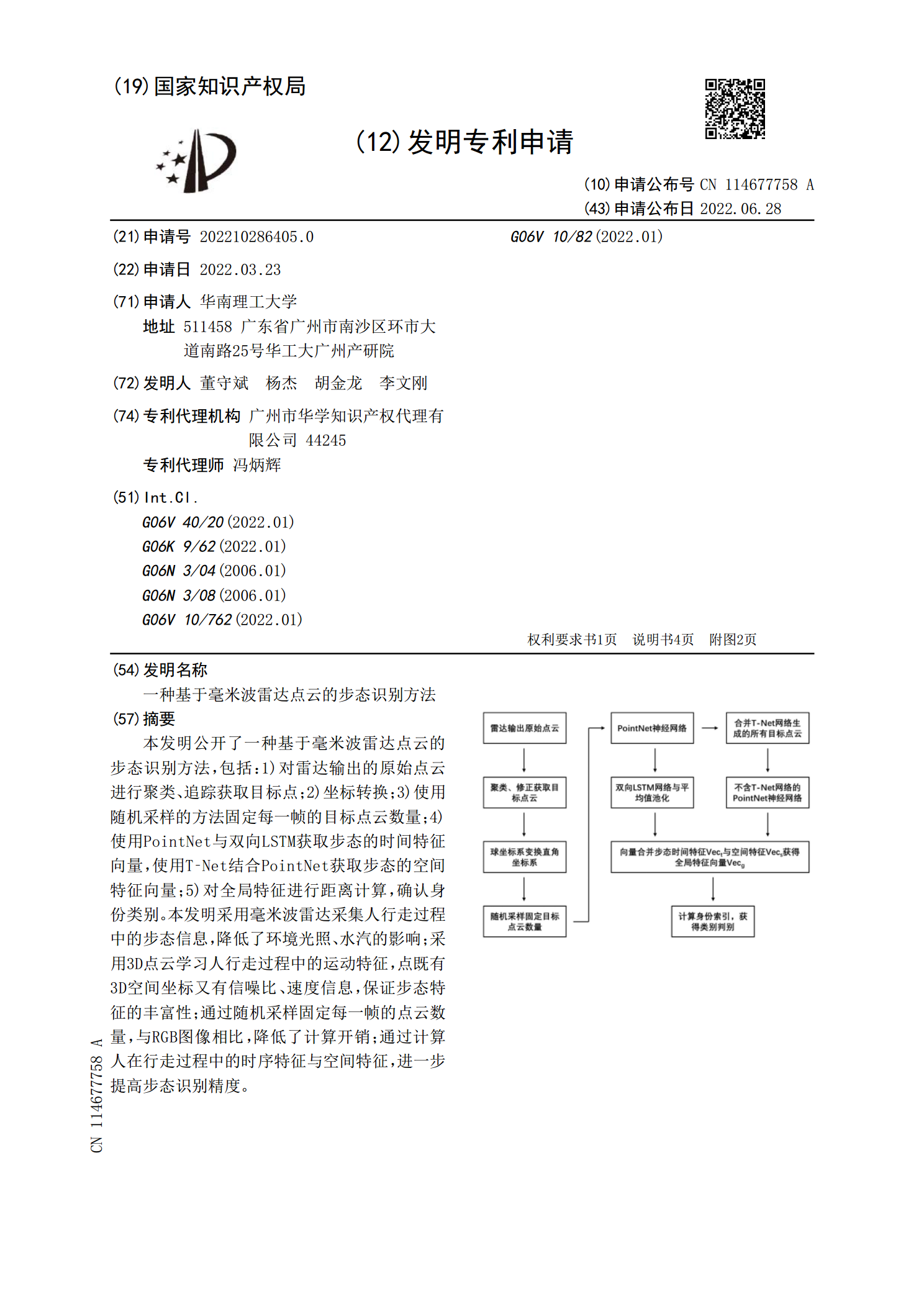
本发明公开了一种基于毫米波雷达点云的步态识别方法,包括:1)对雷达输出的原始点云进行聚类、追踪获取目标点;2)坐标转换;3)使用随机采样的方法固定每一帧的目标点云数量;4)使用PointNet与双向LSTM获取步态的时间特征向量,使用T?Net结合PointNet获取步态的空间特征向量;5)对全局特征进行距离计算,确认身份类别。本发明采用毫米波雷达采集人行走过程中的步态信息,降低了环境光照、水汽的影响;采用3D点云学习人行走过程中的运动特征,点既有3D空间坐标又有信噪比、速度信息,保证步态特征的丰富性;通

一种基于毫米波雷达点云聚类方法及装置.pdf
本申请提供一种基于毫米波雷达点云聚类方法及装置,通过获取待检测目标的当前帧雷达点云信息以及上一帧跟踪输出的航迹信息;然后按照预设算法将所述当前帧雷达点云信息与所述上一帧跟踪输出的航迹信息进行关联,得到所述待检测目标的航迹坐标、航向角以及车型分类;最后以椭圆波门为先验知识以及以所述待检测目标的航迹坐标、航向角以及车型分类为后验知识,对所述待检测目标进行点云聚类。本申请根据车辆为长方形这一先验知识,把聚类中核心对象计算所用的波门设定为椭圆,点云样本通过关联航迹获得航向角和车型分类,再通过航向角和车型分类改变椭
基于无线雷达信号的步态识别方法.pdf
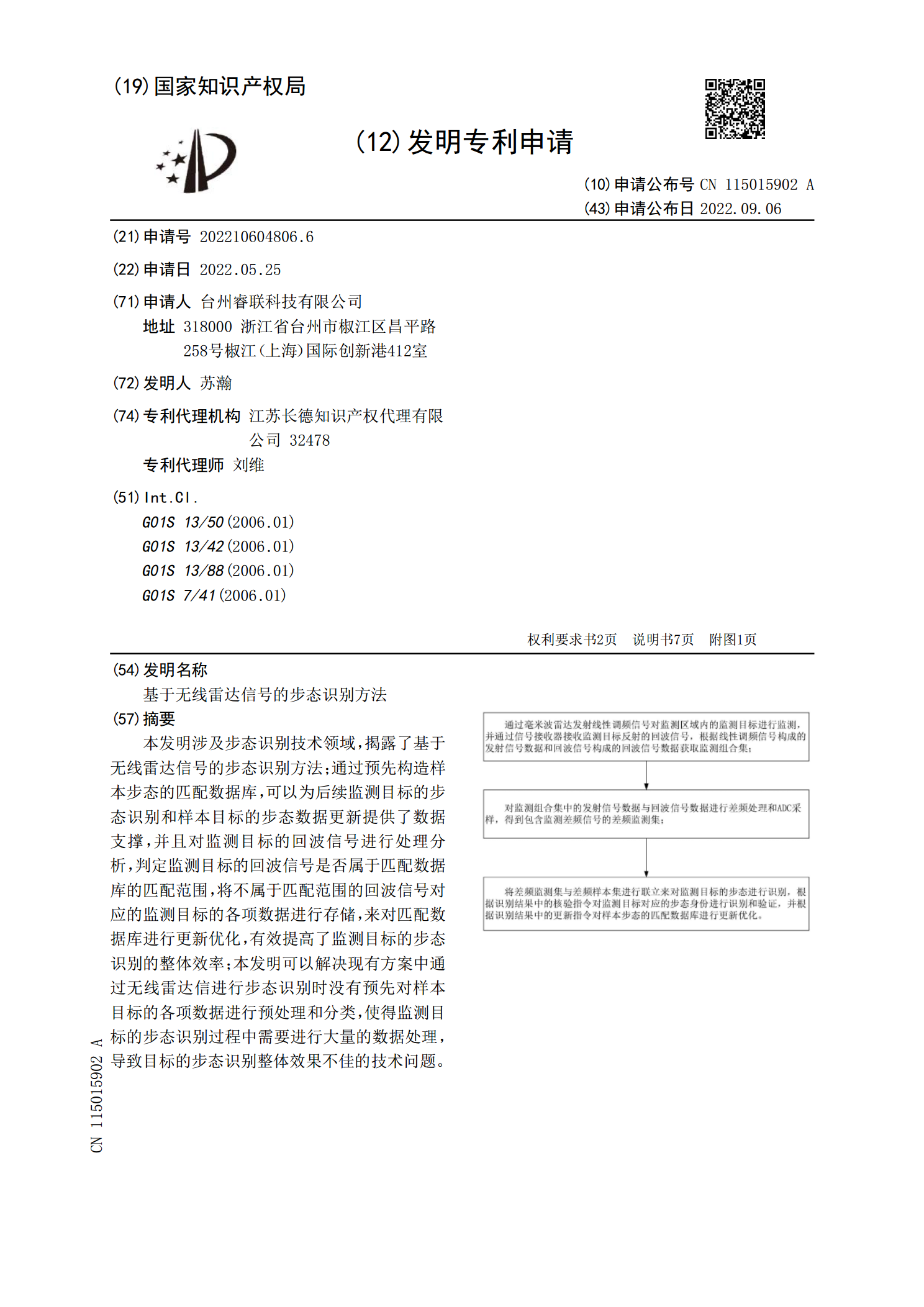
本发明涉及步态识别技术领域,揭露了基于无线雷达信号的步态识别方法;通过预先构造样本步态的匹配数据库,可以为后续监测目标的步态识别和样本目标的步态数据更新提供了数据支撑,并且对监测目标的回波信号进行处理分析,判定监测目标的回波信号是否属于匹配数据库的匹配范围,将不属于匹配范围的回波信号对应的监测目标的各项数据进行存储,来对匹配数据库进行更新优化,有效提高了监测目标的步态识别的整体效率;本发明可以解决现有方案中通过无线雷达信进行步态识别时没有预先对样本目标的各项数据进行预处理和分类,使得监测目标的步态识别过程

一种基于毫米波雷达的手势识别方法.pdf
本发明公开了一种基于毫米波雷达的手势识别方法,该方法包括:构建卷积神经网络模型;获取多种手势的轨迹图作为训练集F,基于所述训练集F对所述卷积神经网络模型训练,得到优化识别模型;所述手势轨迹图为最大峰值对应的动目标在距离‑多普勒坐标系下的移动轨迹;将识别手势的轨迹图输入所述优化识别模型,以识别出所述识别手势的手势类型。本发明实施方式提供的手势识别方法中利用卷积神经网络模型对多种手势的轨迹图训练,得到优化识别模型,将识别手势的轨迹图输入优化识别模型,能够快速并准确的得到手势类型。手势识别方法较为简单,数据处理
一种基于毫米波雷达的手势识别方法.pdf
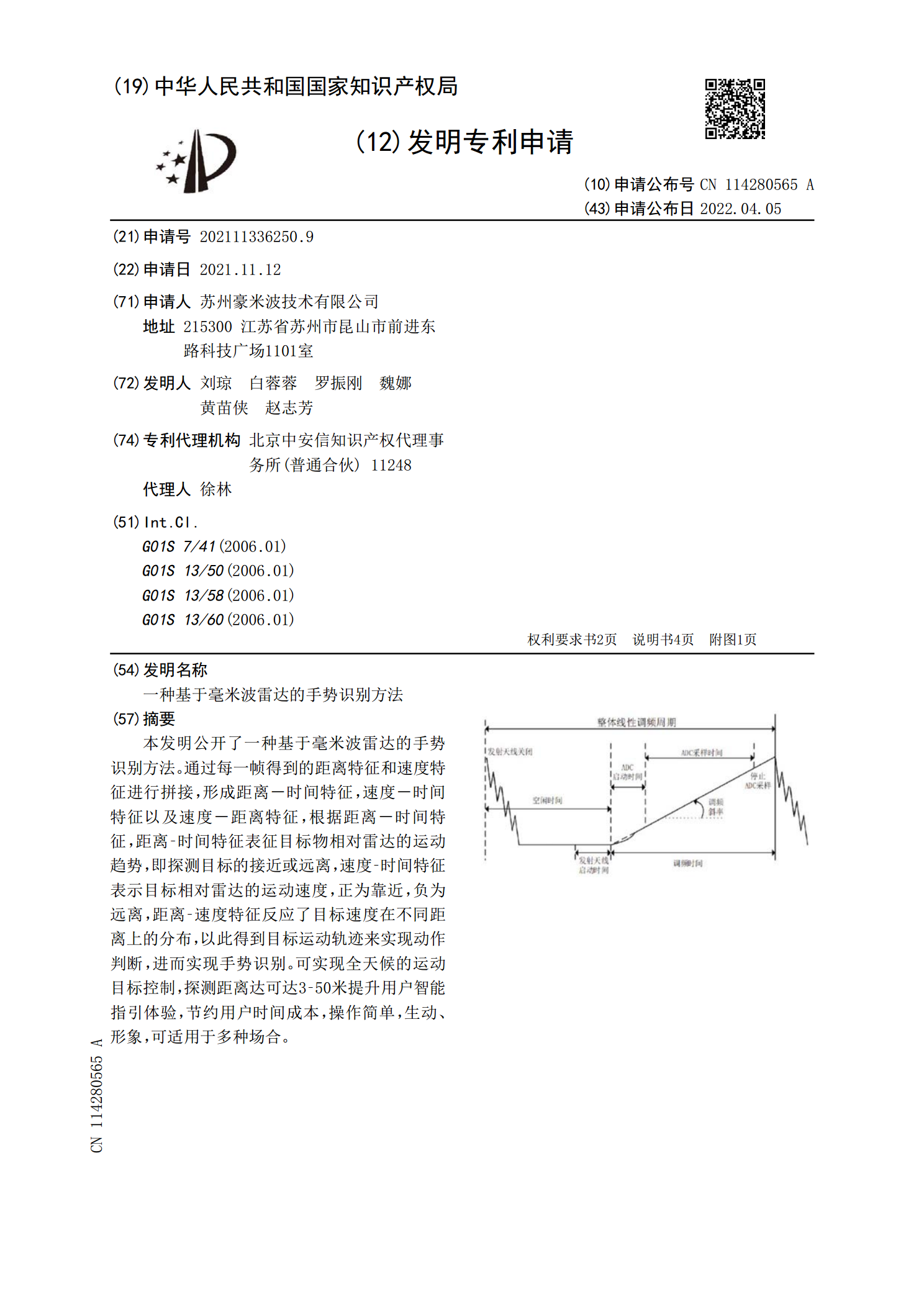
本发明公开了一种基于毫米波雷达的手势识别方法。通过每一帧得到的距离特征和速度特征进行拼接,形成距离-时间特征,速度-时间特征以及速度-距离特征,根据距离-时间特征,距离‑时间特征表征目标物相对雷达的运动趋势,即探测目标的接近或远离,速度‑时间特征表示目标相对雷达的运动速度,正为靠近,负为远离,距离‑速度特征反应了目标速度在不同距离上的分布,以此得到目标运动轨迹来实现动作判断,进而实现手势识别。可实现全天候的运动目标控制,探测距离达可达3‑50米提升用户智能指引体验,节约用户时间成本,操作简单,生动、形象,