
一种数据抓取方法、装置、设备及存储介质.pdf

一条****淑淑

1/10

2/10

3/10

4/10
5/10

6/10

7/10
8/10

9/10
10/10
亲,该文档总共20页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种数据抓取方法、装置、设备及存储介质.pdf
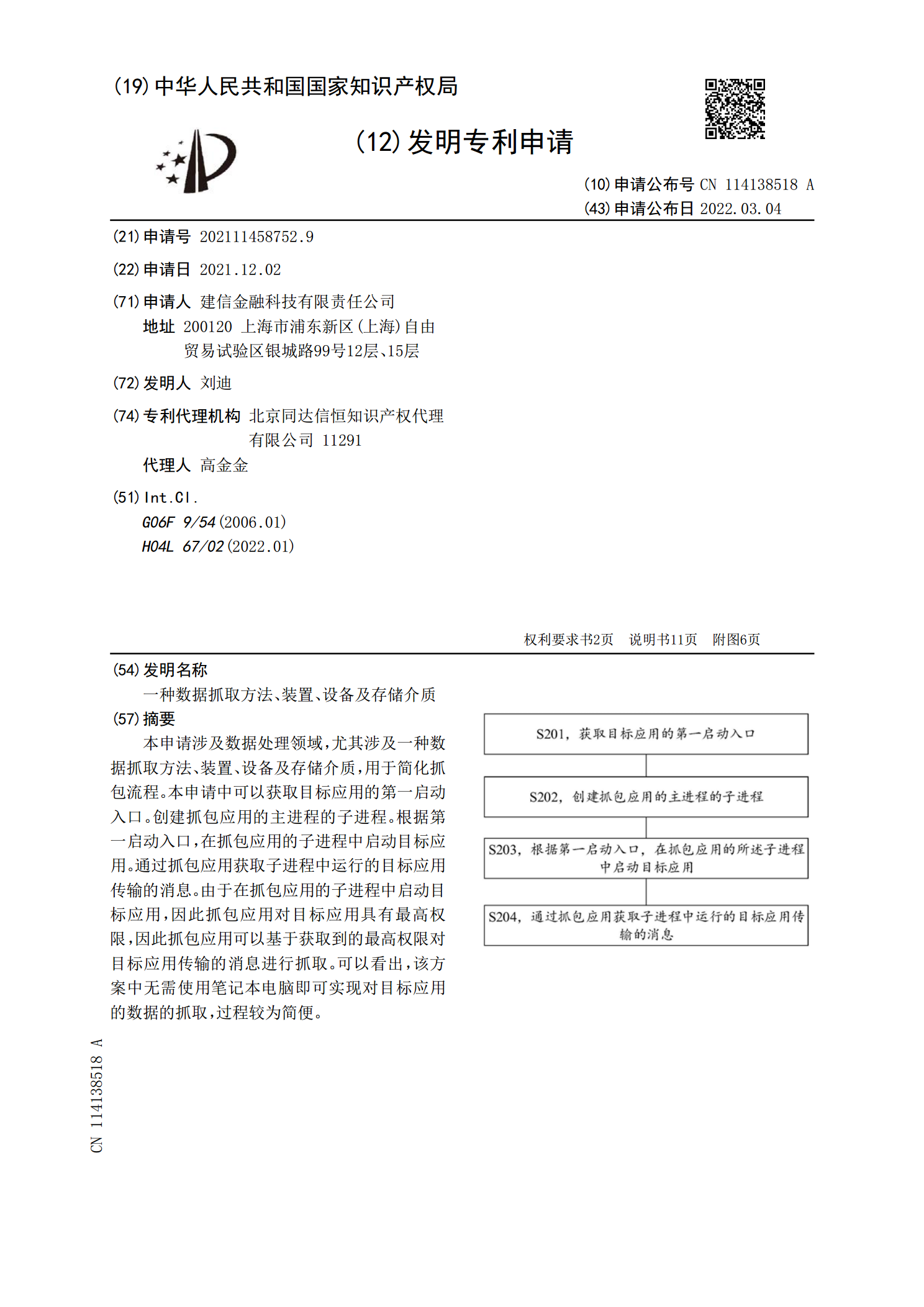
本申请涉及数据处理领域,尤其涉及一种数据抓取方法、装置、设备及存储介质,用于简化抓包流程。本申请中可以获取目标应用的第一启动入口。创建抓包应用的主进程的子进程。根据第一启动入口,在抓包应用的子进程中启动目标应用。通过抓包应用获取子进程中运行的目标应用传输的消息。由于在抓包应用的子进程中启动目标应用,因此抓包应用对目标应用具有最高权限,因此抓包应用可以基于获取到的最高权限对目标应用传输的消息进行抓取。可以看出,该方案中无需使用笔记本电脑即可实现对目标应用的数据的抓取,过程较为简便。

数据抓取方法、装置、存储介质及电子设备.pdf
本公开涉及一种数据抓取方法、装置、存储介质及电子设备,以使用户可以根据需求配置数据抓取任务,无需针对不同网站进行定制开发,就能够抓取所需的数据,耗时短、灵活性高。所述方法包括:获取用户配置的目标数据抓取任务,并从所述目标数据抓取任务中获取目标抓取地址以及所述目标抓取地址对应的目标解析模板;访问所述目标抓取地址对应的目标网页,并获取所述目标网页的页面信息;根据所述目标解析模板解析所述目标网页的页面信息,得到目标数据,并存储所述目标数据。

一种工件抓取方法、装置、设备和存储介质.pdf
本发明公开了一种工件抓取方法、装置、设备和存储介质。该方法包括:通过深度相机获取工作场景对应的场景点云;基于点云匹配算法,根据场景点云、预先构建的工件模型以及预先构建的料框模型,确定深度相机坐标系下的第一工件姿态和第一料框姿态;根据预设的深度相机坐标系与机械臂坐标系之间的对应关系,以及第一工件姿态、第一料框姿态和预设抓取姿态,确定机械臂的目标抓取姿态;获取目标抓取姿态对应的可调夹爪的调整关节角度;根据调整关节角度控制机械臂对料框中的工件进行抓取。本发明实施例利用可调整夹爪提供的额外自由度,可以在使用成本较

对象的抓取方法、装置、存储介质及电子装置.pdf
本发明实施例提供了一种对象的抓取方法、装置、存储介质及电子装置,其中,该方法包括:获取摄像设备对目标区域进行拍摄所得到的场景点云,其中,目标区域中包括目标对象;基于场景点云的场景特征以及模型点云的模型特征确定出由模型坐标系转换至场景坐标系的初始匹配矩阵集;确定初始匹配矩阵集中包括的每个初始匹配矩阵中与模型点云中匹配成功的点的目标数量,并基于目标数量从初始匹配矩阵集中确定出目标匹配矩阵;基于目标匹配矩阵确定抓取目标对象中包括的第一对象的目标位姿;控制目标设备按照目标位姿抓取第一对象。通过本发明,解决了相关技

数据存储方法、装置、设备及存储介质.pdf
本公开实施例涉及一种数据存储方法、装置、设备及存储介质,通过在获取到用户设备发送的文件版本控制请求后,基于文件版本控制请求,在接收到文件的新版本时,将文件的新版本存储到对象存储设备中,并保留该文件在对象存储设备中的历史版本,使得文件在对象存储设备中可以保留多个版本,这样即使文件在对象存储设备中的某一个或几个版本被破坏或者删除,也可以根据文件的其他版本进行恢复,从而避免了单一文件存储时,因覆盖写、误改数据或者篡改数据等问题发生时,历史数据无法恢复的问题,提高了数据存储和数据备份的安全性。