
一种智能装卸系统.pdf

爱欢****23

1/10

2/10
3/10
4/10
5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种智能装卸系统.pdf
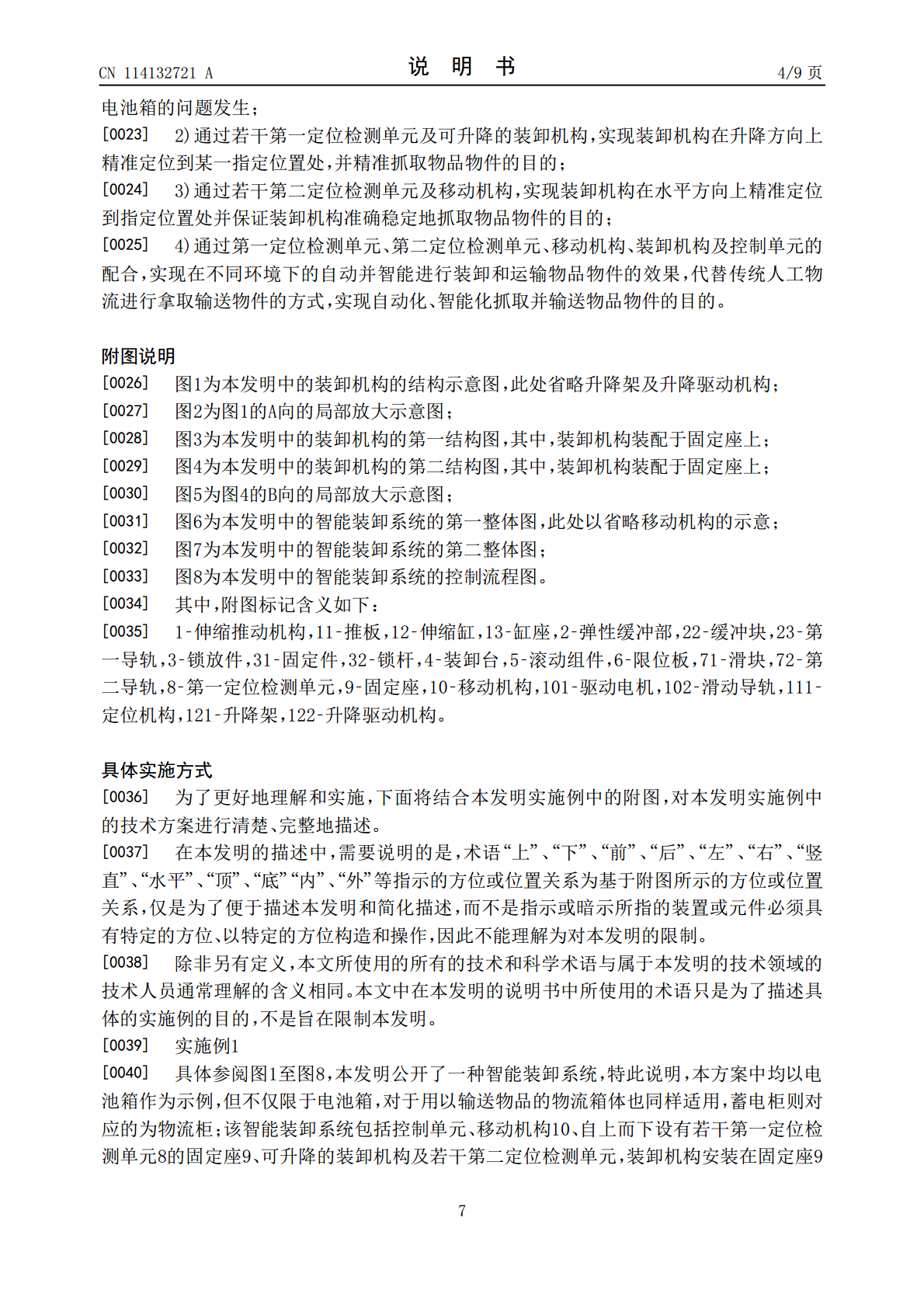
本发明公开了一种智能装卸系统,包括控制单元、自上而下设有若干第一定位检测单元的固定座、可升降的装卸机构及设有若干第二定位检测单元的移动机构,装卸机构安装在固定座的内侧,固定座连接移动机构;第二定位检测单元用于检测装卸机构或固定座的水平位移定位信息,并将其发送至控制单元,直至传送位置与预定水平位移位置一致时,控制单元输出控制信号至移动机构控制其停止移动,第一定位检测单元用于检测装卸机构的升降位置信息,并将其发送至控制单元,直至升降位置与预定高度位置一致时,控制单元输出控制信号控制装卸机构停止升降,解决现有索

一种智能装卸机系统.pdf
本发明公开了一种智能装卸机系统。本发明包括场操作控制台、货物转向台、装卸机主机、智能装卸作业车头、连接板、货车;装卸机主机与货物转向台一侧相连,智能装卸作业车头与装卸机主机上表面滑动连接,连接板设置在装卸机主机的右端,卸货时连接板可自动放下与货车车厢相连;现场操作控制台上设置有PLC触摸屏,PLC液晶触摸屏可进行现场半自动作业控制,也可通过远程通信实现远程作业,滚轮安装在装卸机主机的底部,连接器的前端设置有轨道开口,轨道设置在装卸机主机上表面的两侧,且轨道与连接器上的轨道开口相连通,多根滚筒平行安装在装卸
智能装卸机头、智能装卸机器人系统及货物装卸方法.pdf
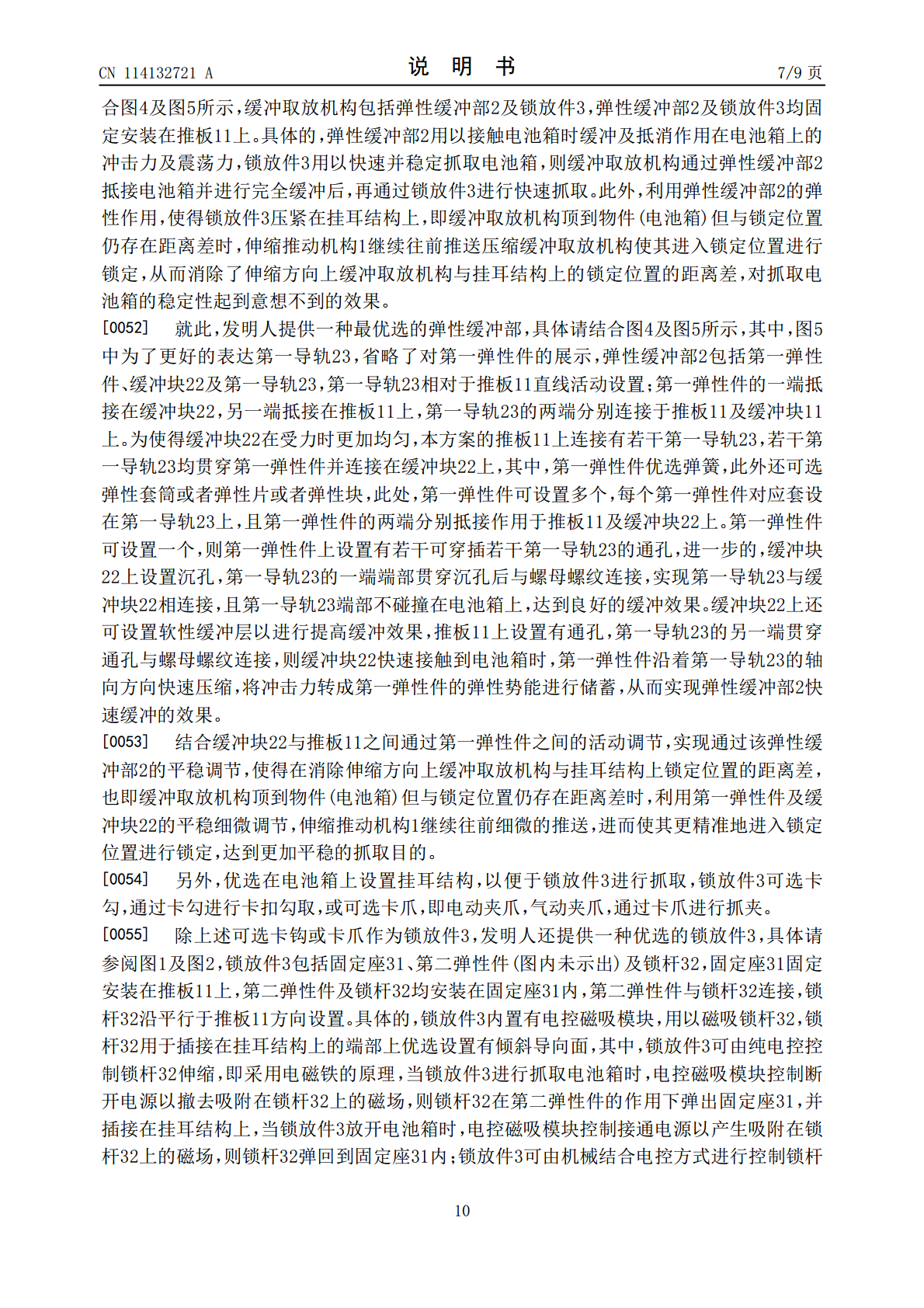
本申请提供智能装卸机头、智能装卸机器人系统及货物装卸方法。智能装卸机头,包括有机头本体,机头本体上沿其长度方向依次排列设有多个换向机构;连接架;其一端连接设于机头本体一侧,另一端与自动装车机连接;吸盘机构,活动设于机头本体上,用于将货物吸取至机头本体上或将机头本体上的货物搬运至货车上或仓库内;智能装卸机器人系统,包括有伸缩皮带输送机构;自动装车机,其一端活动设有移动架,移动架安装有智能装卸机头;以及随动升降台。本申请结构简单,通过在机头本体上设置多个换向机构,能够调整货物的位置,再通过吸嘴机构进行装卸,实
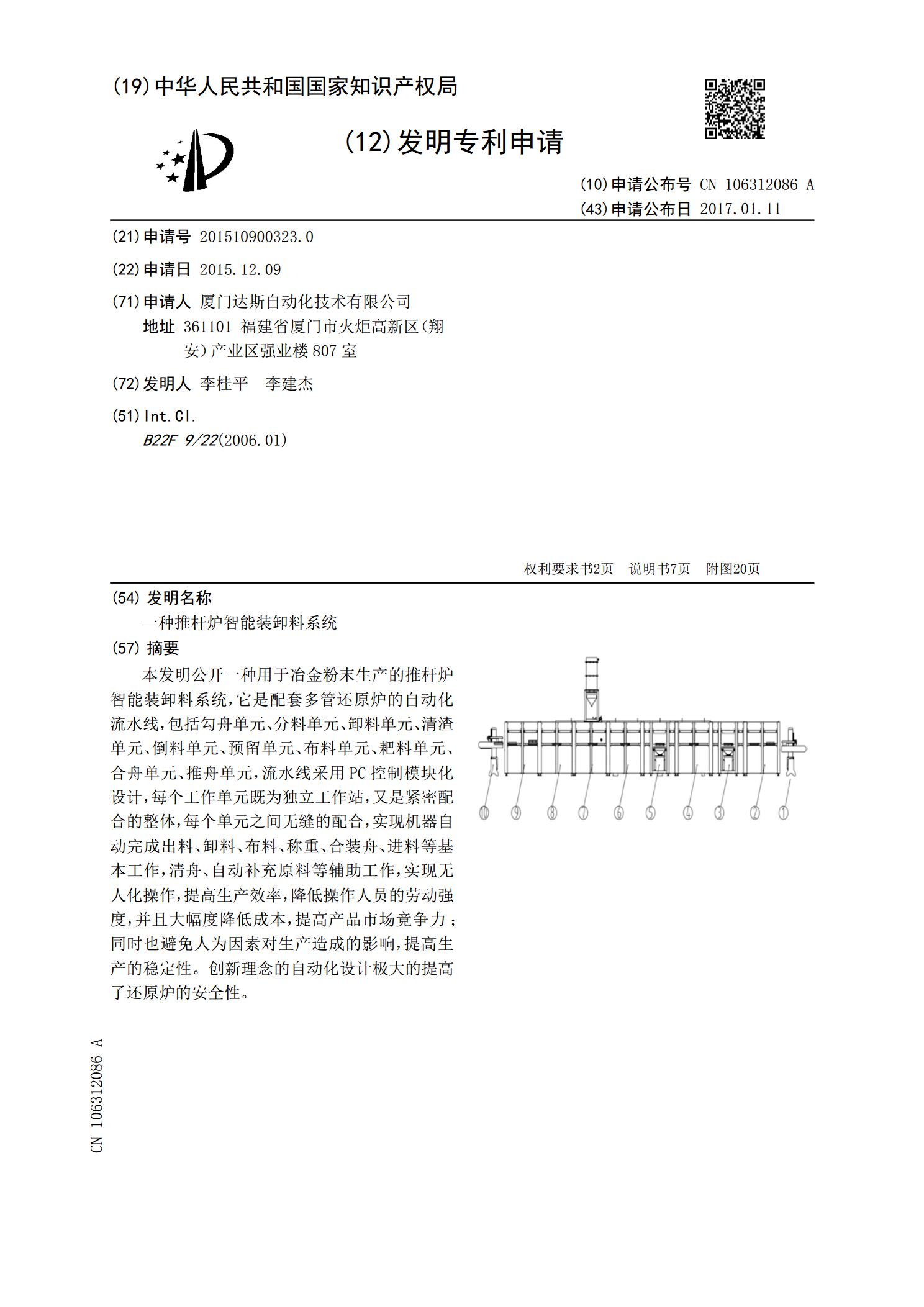
一种推杆炉智能装卸料系统.pdf
本发明公开一种用于冶金粉末生产的推杆炉智能装卸料系统,它是配套多管还原炉的自动化流水线,包括勾舟单元、分料单元、卸料单元、清渣单元、倒料单元、预留单元、布料单元、耙料单元、合舟单元、推舟单元,流水线采用PC控制模块化设计,每个工作单元既为独立工作站,又是紧密配合的整体,每个单元之间无缝的配合,实现机器自动完成出料、卸料、布料、称重、合装舟、进料等基本工作,清舟、自动补充原料等辅助工作,实现无人化操作,提高生产效率,降低操作人员的劳动强度,并且大幅度降低成本,提高产品市场竞争力;同时也避免人为因素对生产造成
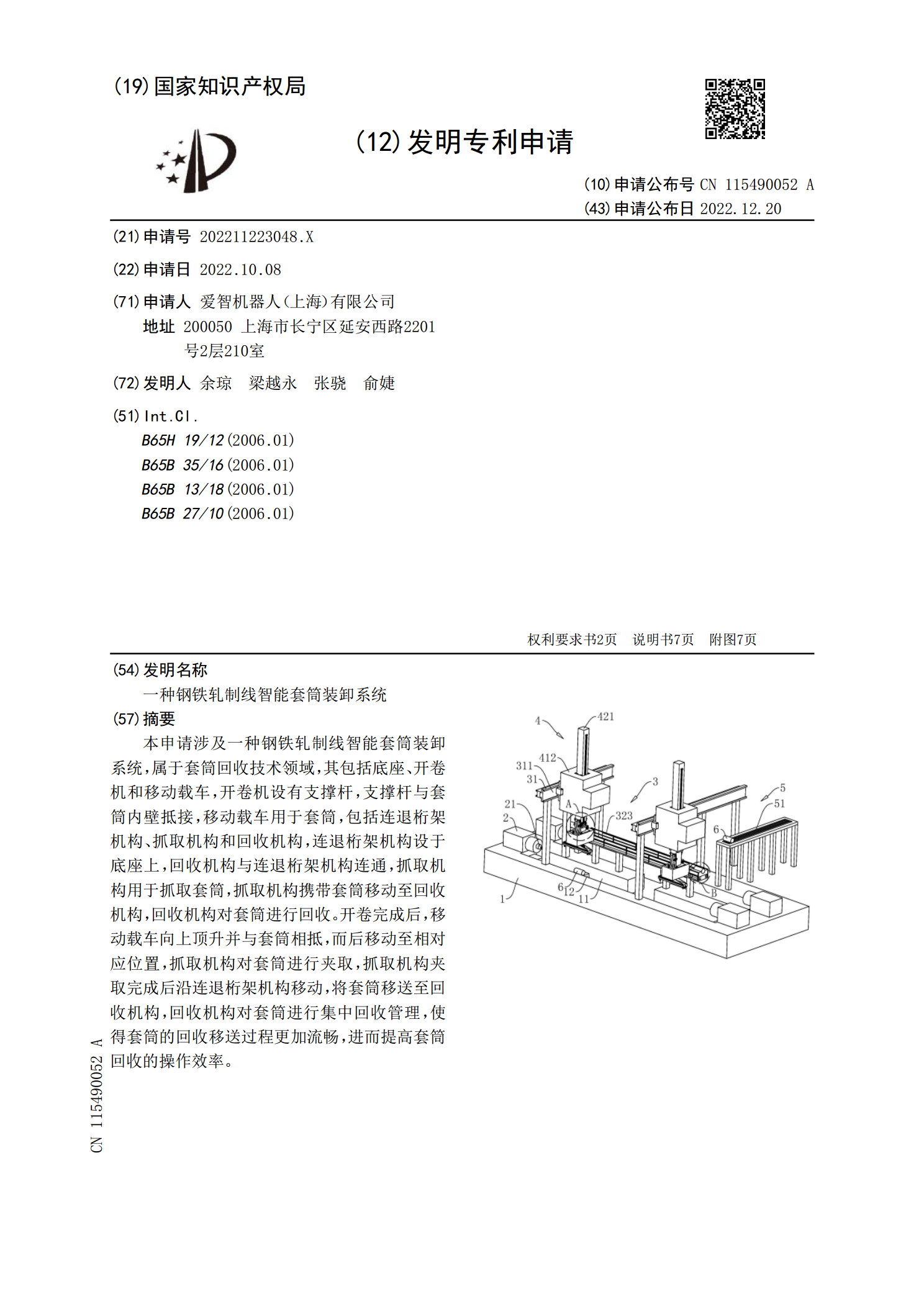
一种钢铁轧制线智能套筒装卸系统.pdf
本申请涉及一种钢铁轧制线智能套筒装卸系统,属于套筒回收技术领域,其包括底座、开卷机和移动载车,开卷机设有支撑杆,支撑杆与套筒内壁抵接,移动载车用于套筒,包括连退桁架机构、抓取机构和回收机构,连退桁架机构设于底座上,回收机构与连退桁架机构连通,抓取机构用于抓取套筒,抓取机构携带套筒移动至回收机构,回收机构对套筒进行回收。开卷完成后,移动载车向上顶升并与套筒相抵,而后移动至相对应位置,抓取机构对套筒进行夹取,抓取机构夹取完成后沿连退桁架机构移动,将套筒移送至回收机构,回收机构对套筒进行集中回收管理,使得套筒的