
智能装卸机头、智能装卸机器人系统及货物装卸方法.pdf

An****70

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
智能装卸机头、智能装卸机器人系统及货物装卸方法.pdf
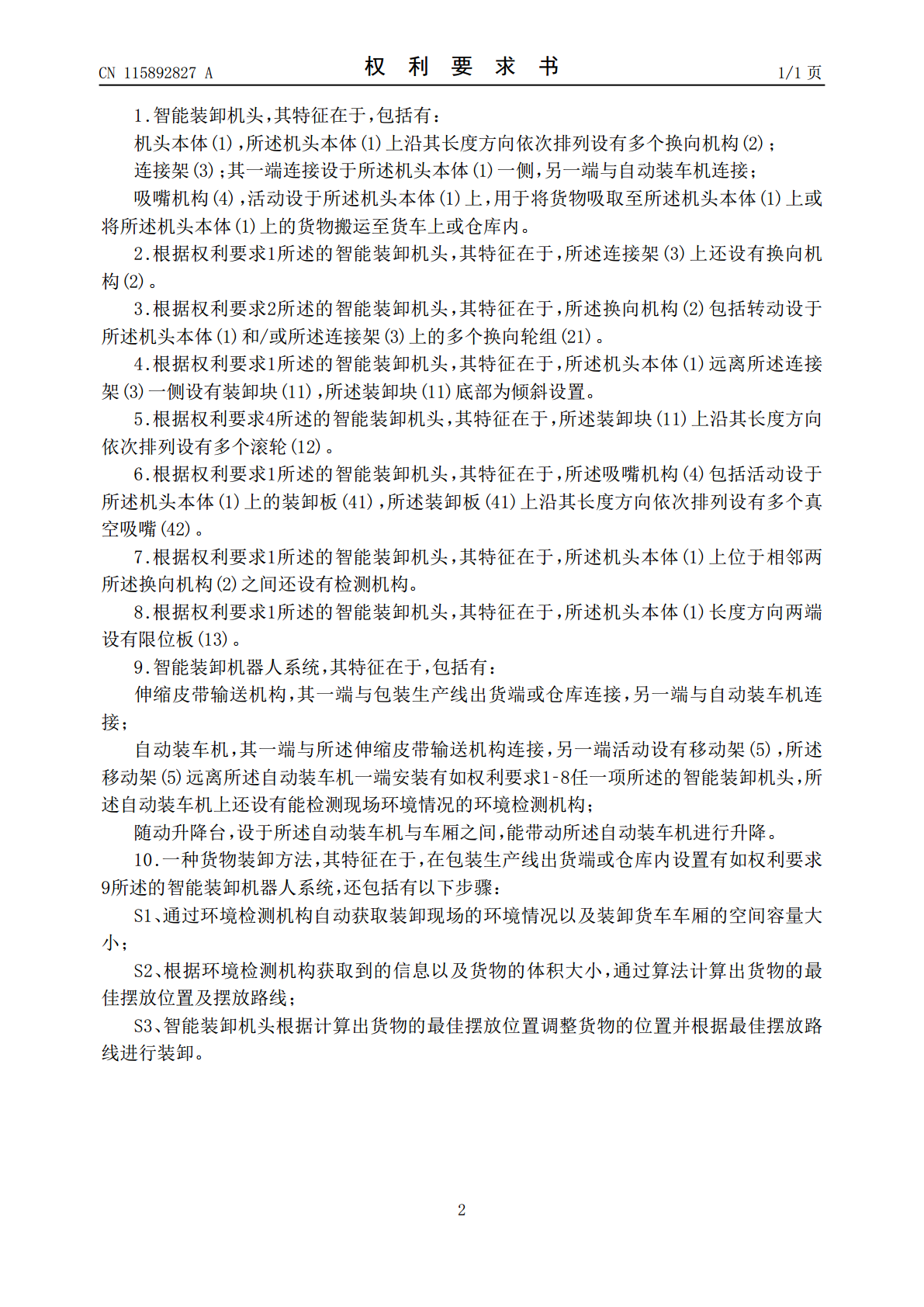
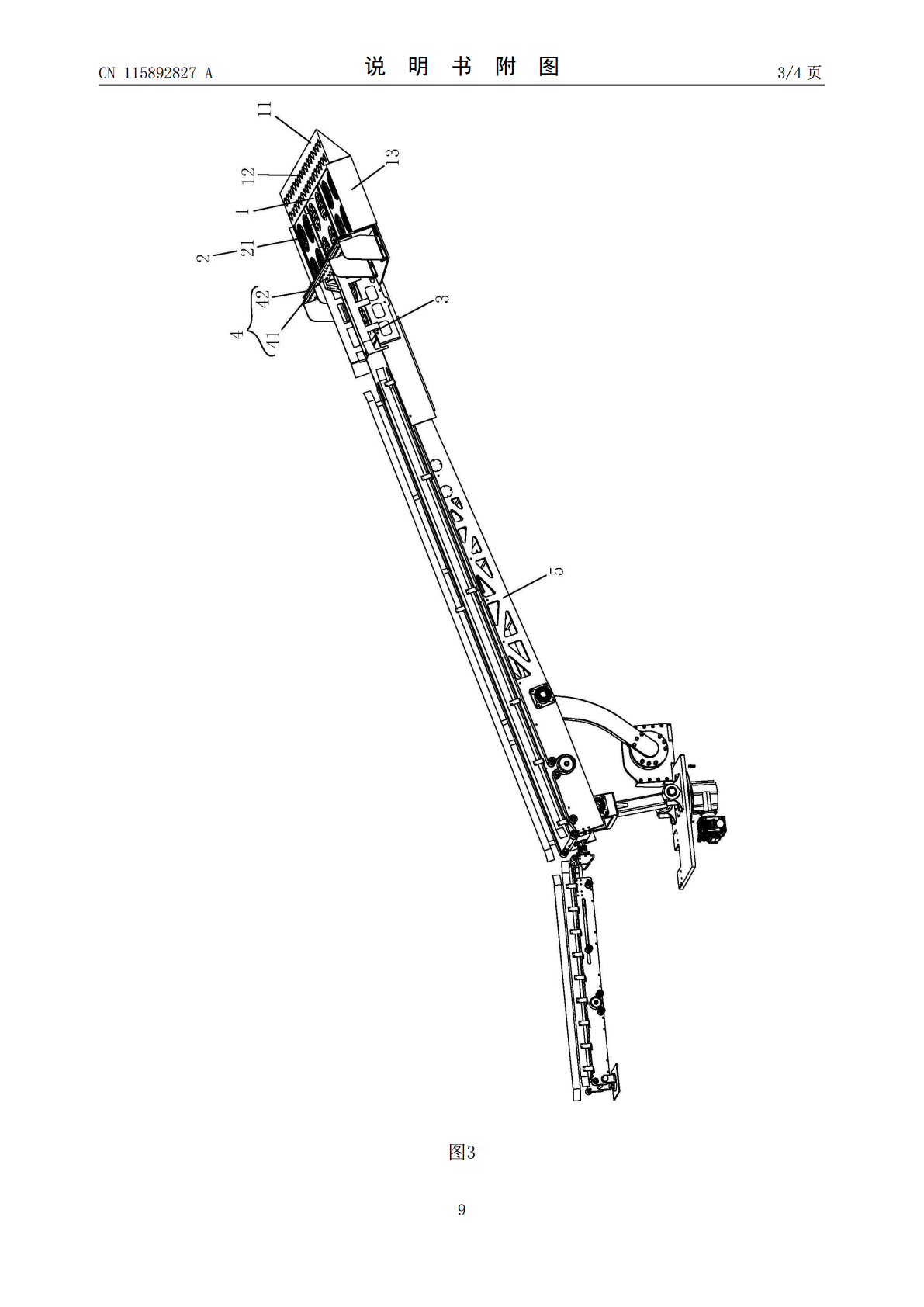
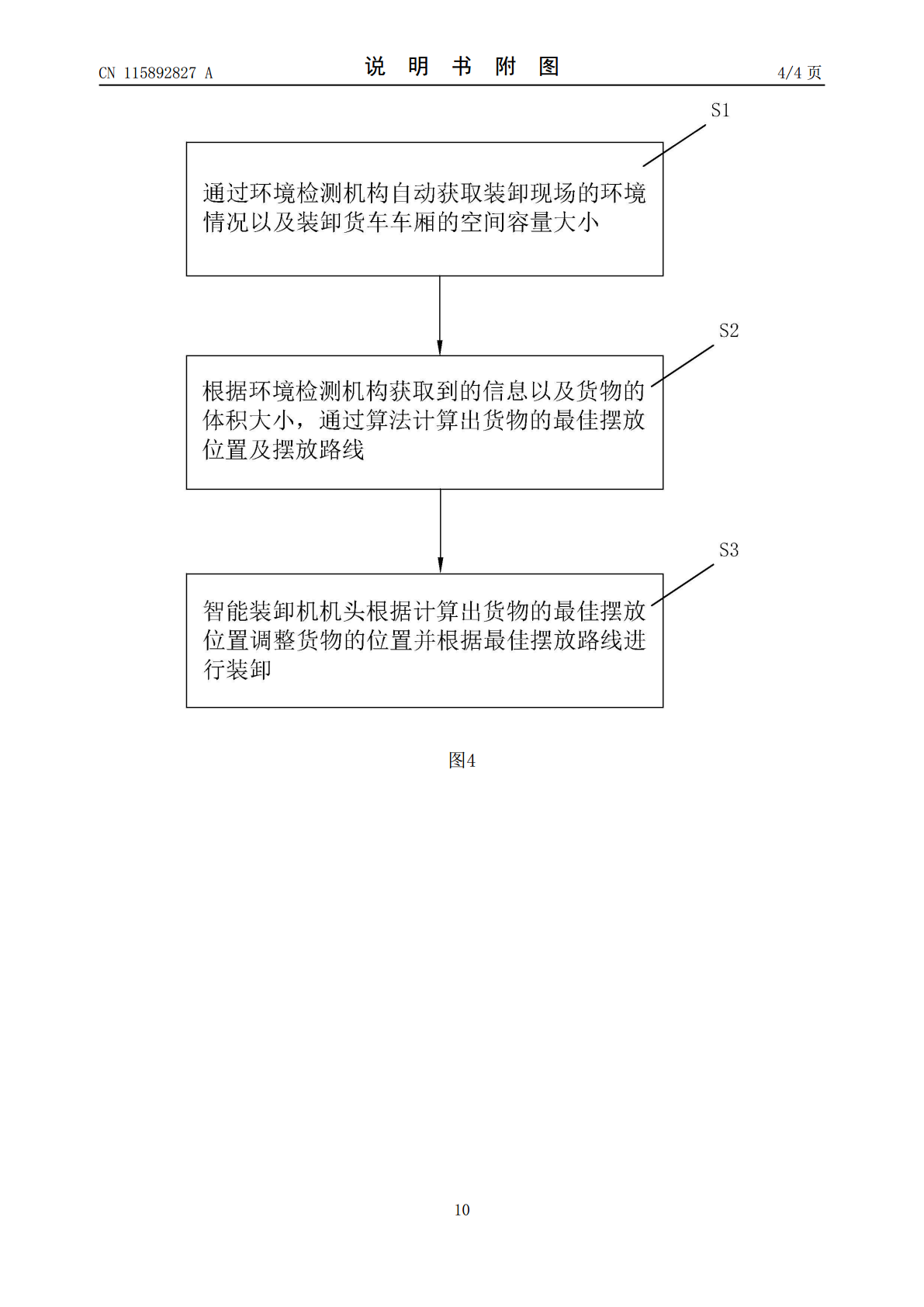
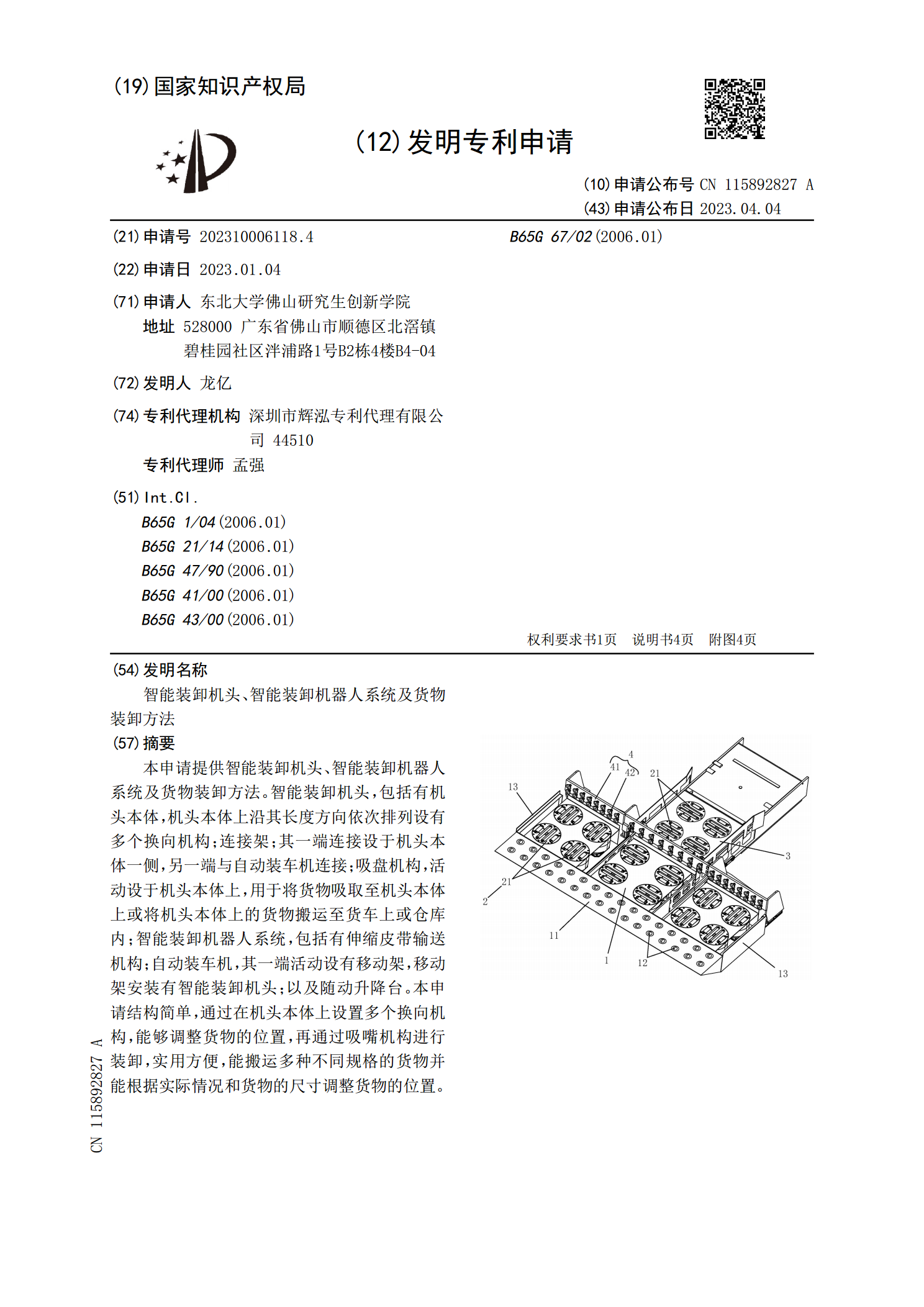
本申请提供智能装卸机头、智能装卸机器人系统及货物装卸方法。智能装卸机头,包括有机头本体,机头本体上沿其长度方向依次排列设有多个换向机构;连接架;其一端连接设于机头本体一侧,另一端与自动装车机连接;吸盘机构,活动设于机头本体上,用于将货物吸取至机头本体上或将机头本体上的货物搬运至货车上或仓库内;智能装卸机器人系统,包括有伸缩皮带输送机构;自动装车机,其一端活动设有移动架,移动架安装有智能装卸机头;以及随动升降台。本申请结构简单,通过在机头本体上设置多个换向机构,能够调整货物的位置,再通过吸嘴机构进行装卸,实
一种智能装卸机器人装卸方法.pdf
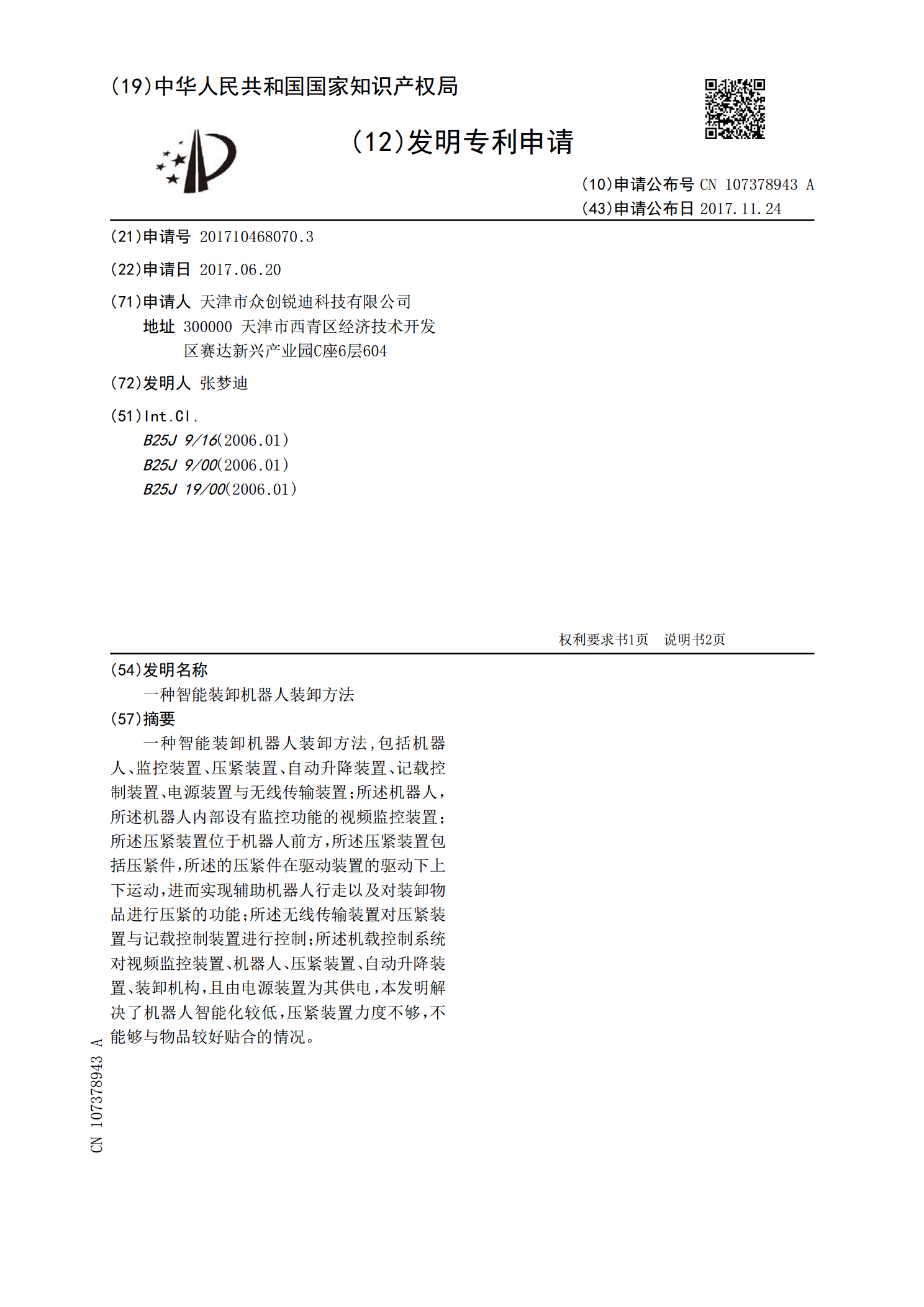
一种智能装卸机器人装卸方法,包括机器人、监控装置、压紧装置、自动升降装置、记载控制装置、电源装置与无线传输装置;所述机器人,所述机器人内部设有监控功能的视频监控装置;所述压紧装置位于机器人前方,所述压紧装置包括压紧件,所述的压紧件在驱动装置的驱动下上下运动,进而实现辅助机器人行走以及对装卸物品进行压紧的功能;所述无线传输装置对压紧装置与记载控制装置进行控制;所述机载控制系统对视频监控装置、机器人、压紧装置、自动升降装置、装卸机构,且由电源装置为其供电,本发明解决了机器人智能化较低,压紧装置力度不够,不能够
一种智能装卸系统.pdf
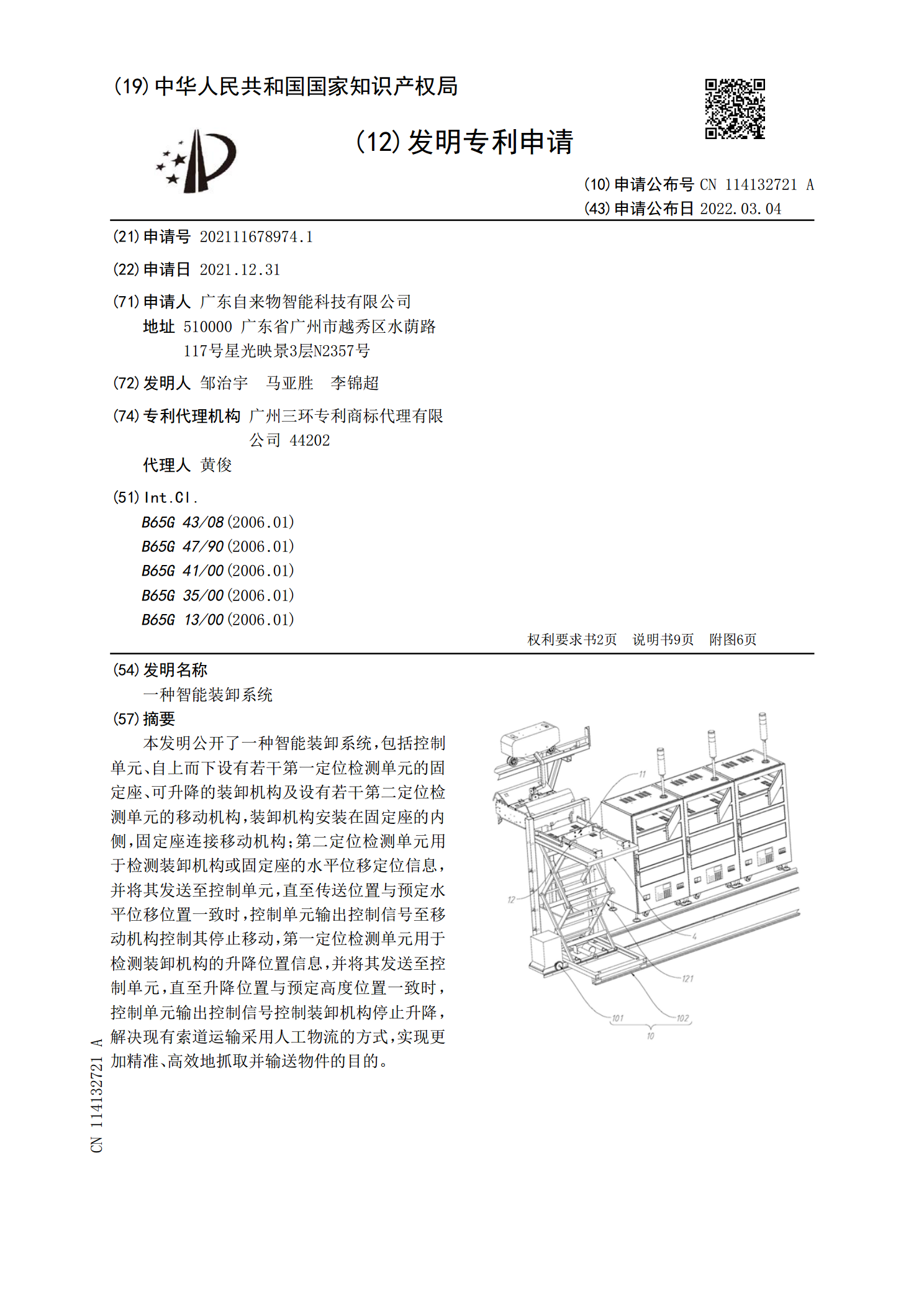
本发明公开了一种智能装卸系统,包括控制单元、自上而下设有若干第一定位检测单元的固定座、可升降的装卸机构及设有若干第二定位检测单元的移动机构,装卸机构安装在固定座的内侧,固定座连接移动机构;第二定位检测单元用于检测装卸机构或固定座的水平位移定位信息,并将其发送至控制单元,直至传送位置与预定水平位移位置一致时,控制单元输出控制信号至移动机构控制其停止移动,第一定位检测单元用于检测装卸机构的升降位置信息,并将其发送至控制单元,直至升降位置与预定高度位置一致时,控制单元输出控制信号控制装卸机构停止升降,解决现有索

货物装卸系统.pdf
本发明公开了货物装卸系统,包括:卸货车,其包括方形车体、一对第一推动架以及一对第一直线驱动机构,方形车体包括方形承载架和轮体,方形承载架的顶面具有方形承载台;货架,其具有搁板、第二推动架以及第二直线驱动机构,第二直线驱动机构连接至第二推动架;货物固定机构,其包括方形框架和四个固定爪,方形框架可沿方形承载架上下移动的方式套设于方形承载架上,一第一拉伸弹簧连接于固定爪的下端与侧边框之间,以向固定爪施加使固定爪的上端向方形框架的中间靠拢的拉力,第三直线驱动机构连接至方形框架。本发明实现了对货物装卸的自动化,提高

一种智能装卸机系统.pdf
本发明公开了一种智能装卸机系统。本发明包括场操作控制台、货物转向台、装卸机主机、智能装卸作业车头、连接板、货车;装卸机主机与货物转向台一侧相连,智能装卸作业车头与装卸机主机上表面滑动连接,连接板设置在装卸机主机的右端,卸货时连接板可自动放下与货车车厢相连;现场操作控制台上设置有PLC触摸屏,PLC液晶触摸屏可进行现场半自动作业控制,也可通过远程通信实现远程作业,滚轮安装在装卸机主机的底部,连接器的前端设置有轨道开口,轨道设置在装卸机主机上表面的两侧,且轨道与连接器上的轨道开口相连通,多根滚筒平行安装在装卸