
一种端到端的多目标识别、追踪与预测方法.pdf

悠柔****找我


1/10

2/10
3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

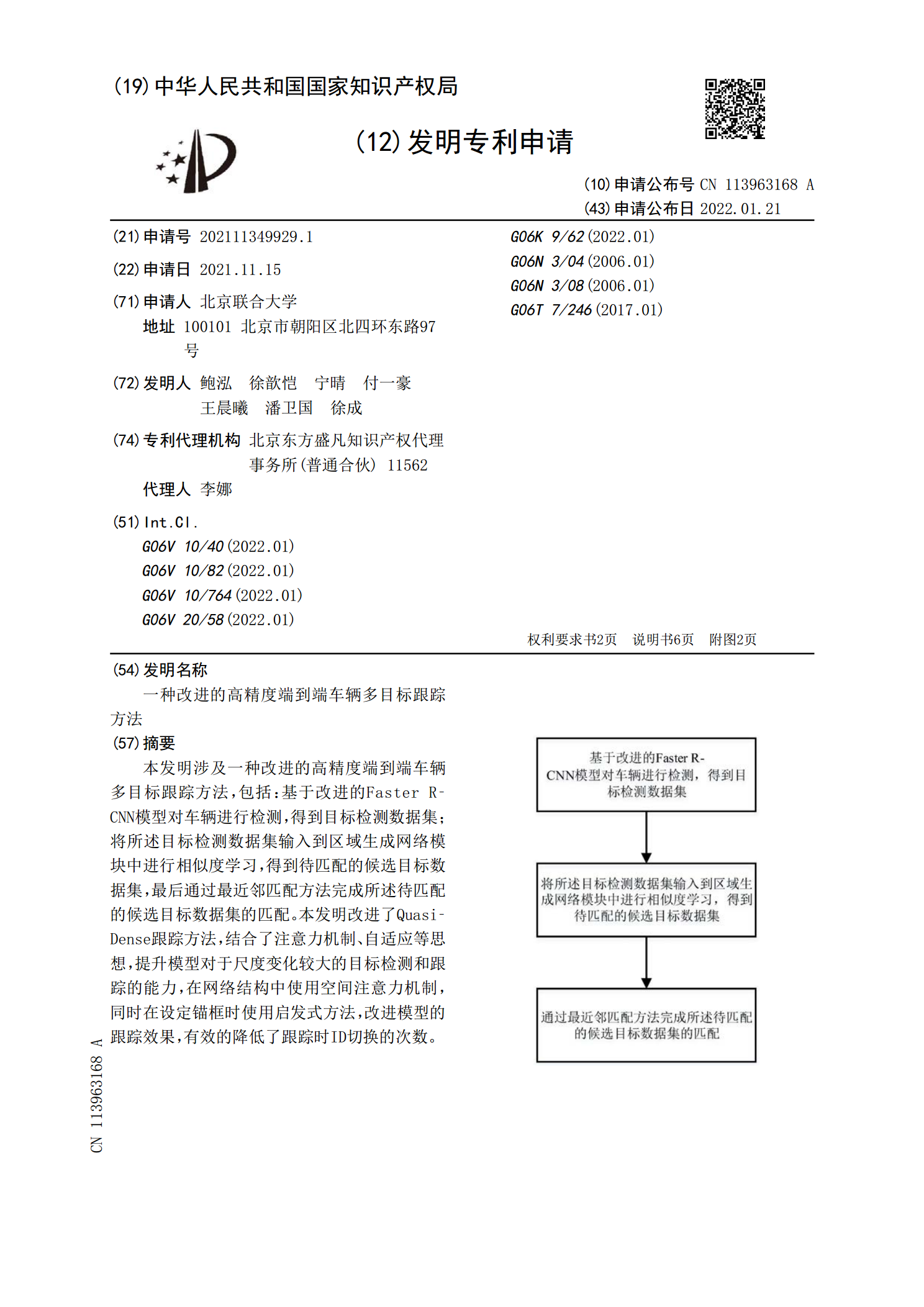
一种端到端的多目标识别、追踪与预测方法.pdf
本发明公开了一种端到端的多目标识别、追踪与预测方法,属于车联网、智能汽车技术领域。本发明方法包括:建立端到端的多目标识别、追踪和预测模型,包括目标检测器、目标追踪模块和轨迹预测模块;目标检测模块使用基于中心点的多目标检测器;目标追踪模块采用基于图卷积神经网络对多目标追踪;轨迹预测模块基于图网络对多目标进行运动轨迹预测,包括轨迹目的点的预测,智能体间信息传递,生成未来轨迹;本发明将端到端的多目标识别、追踪和预测模型作为一个整体,采用联合训练框架进行同时训练。本发明三个模块同时训练、相互促进,进一步提高了最终
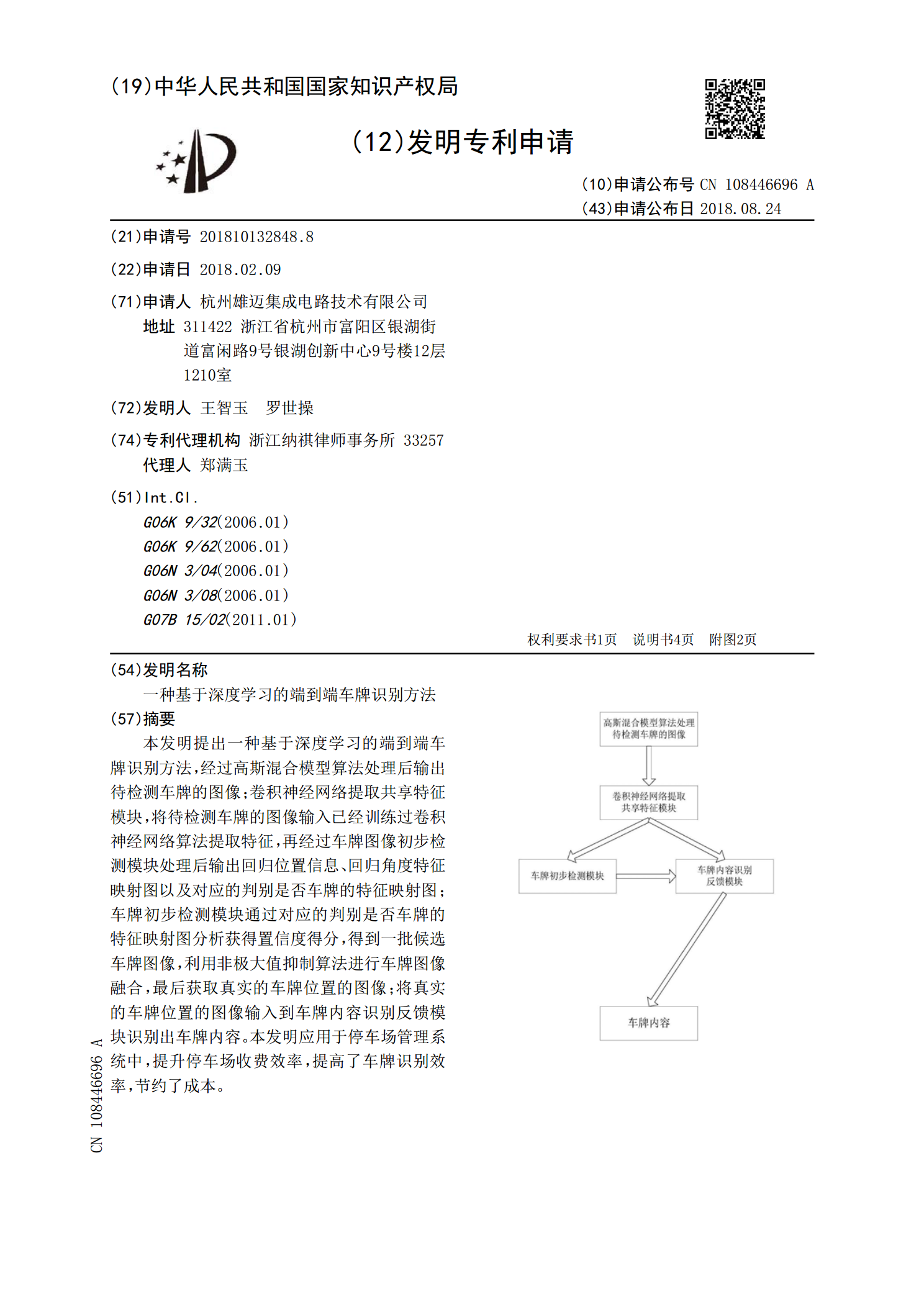
一种基于深度学习的端到端车牌识别方法.pdf
本发明提出一种基于深度学习的端到端车牌识别方法,经过高斯混合模型算法处理后输出待检测车牌的图像;卷积神经网络提取共享特征模块,将待检测车牌的图像输入已经训练过卷积神经网络算法提取特征,再经过车牌图像初步检测模块处理后输出回归位置信息、回归角度特征映射图以及对应的判别是否车牌的特征映射图;车牌初步检测模块通过对应的判别是否车牌的特征映射图分析获得置信度得分,得到一批候选车牌图像,利用非极大值抑制算法进行车牌图像融合,最后获取真实的车牌位置的图像;将真实的车牌位置的图像输入到车牌内容识别反馈模块识别出车牌内容

一种端到端的空心验证码识别方法.pdf
本发明发明了一种端到端的空心验证码识别方法,步骤为:A、对扭曲粘连的空心验证码进行预处理,去干扰,获得只含有字符的实心验证码;B、设计卷积神经网络模型,训练预处理后已知标签的整张黑白验证码的模型;C、利用步骤B的卷积神经网络模型,对未知标签的验证码进行识别。本发明提供的技术方案简单实用,能及时的对背景有图像干扰的空心验证码进行预处理,去除背景干扰,保留验证码的有效字符。本技术方案不涉及字符分割,对扭曲粘连的验证码有较高的识别率,增加了验证码识别的统一性。
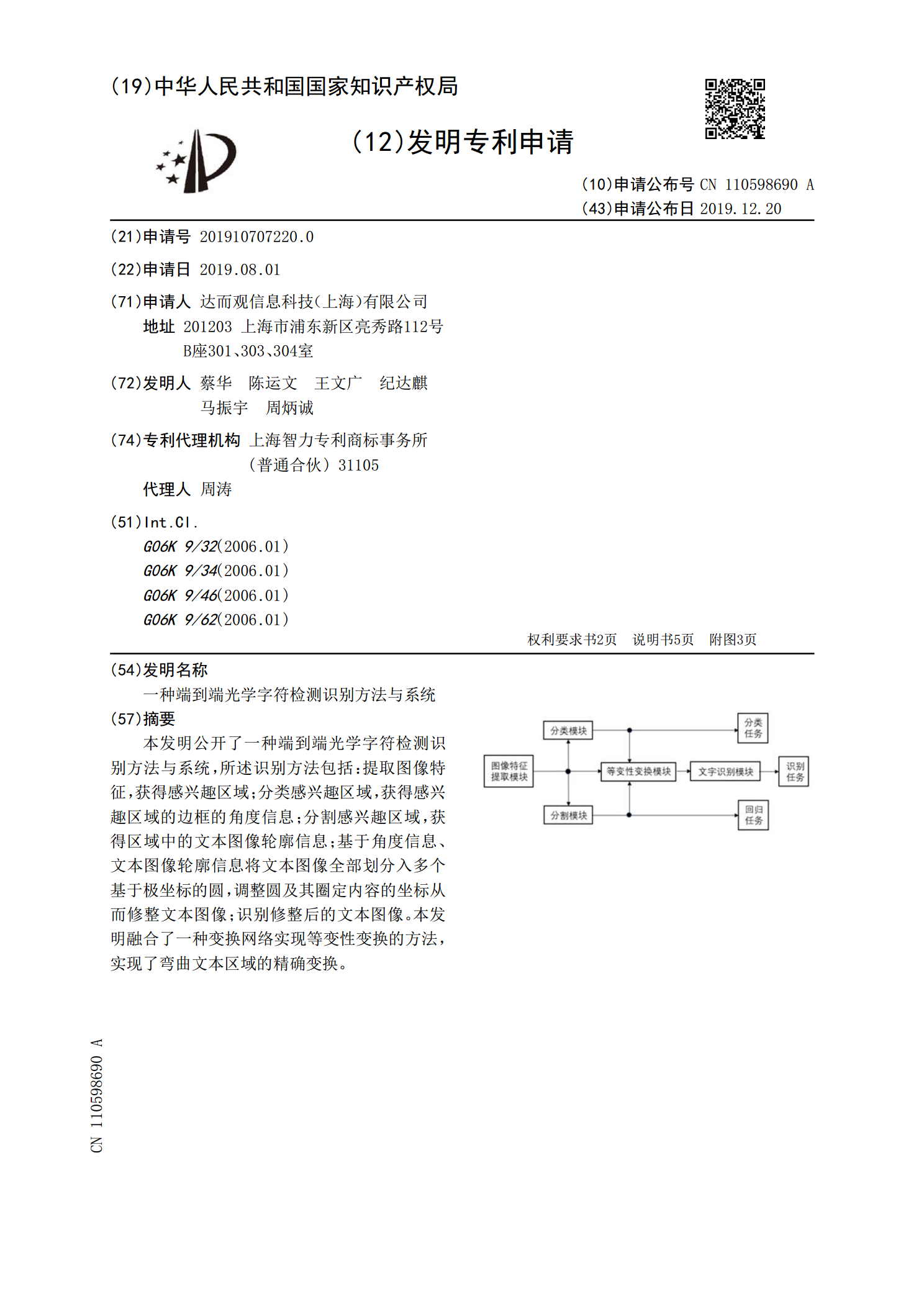
一种端到端光学字符检测识别方法与系统.pdf
本发明公开了一种端到端光学字符检测识别方法与系统,所述识别方法包括:提取图像特征,获得感兴趣区域;分类感兴趣区域,获得感兴趣区域的边框的角度信息;分割感兴趣区域,获得区域中的文本图像轮廓信息;基于角度信息、文本图像轮廓信息将文本图像全部划分入多个基于极坐标的圆,调整圆及其圈定内容的坐标从而修整文本图像;识别修整后的文本图像。本发明融合了一种变换网络实现等变性变换的方法,实现了弯曲文本区域的精确变换。
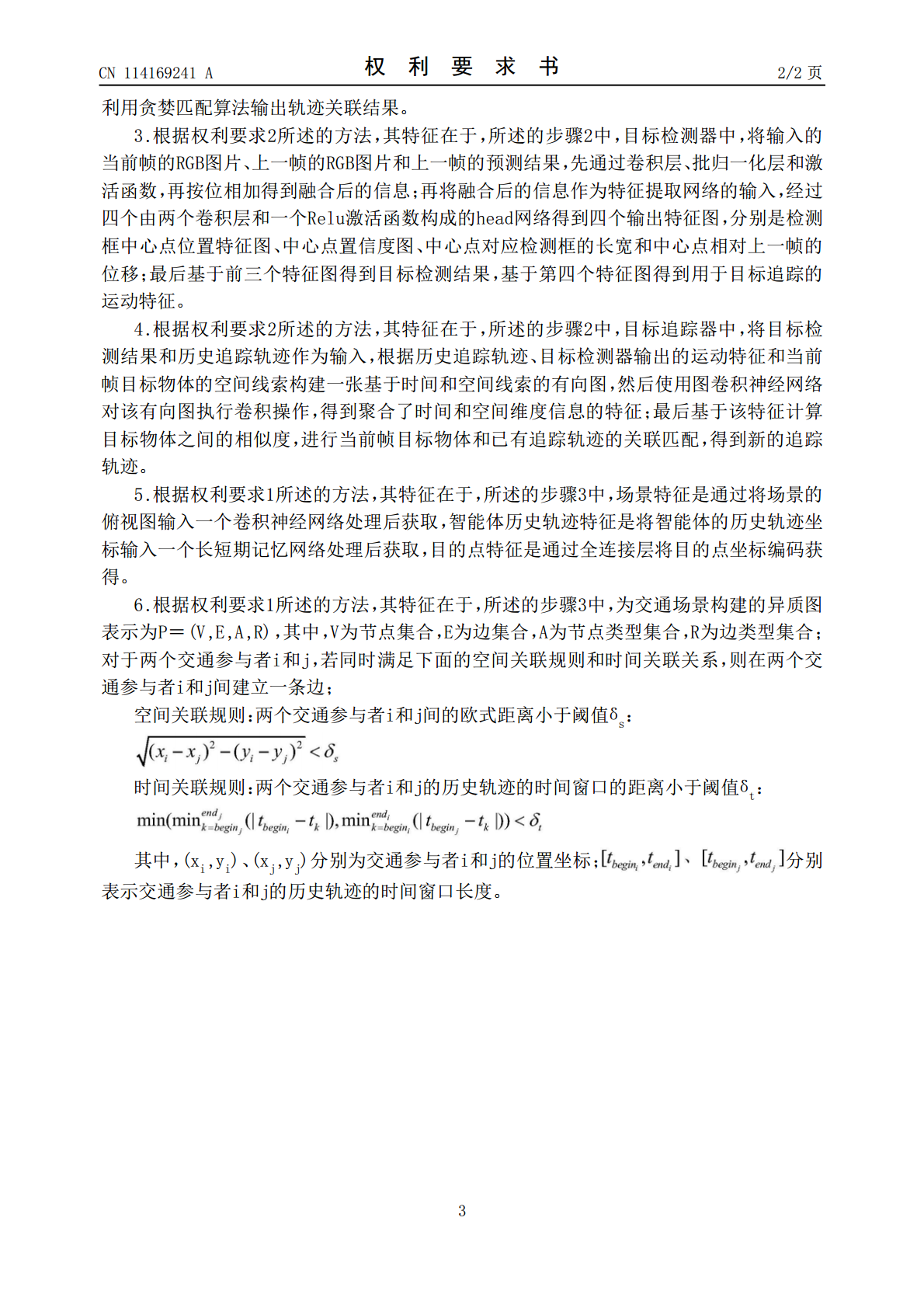
一种改进的高精度端到端车辆多目标跟踪方法.pdf
本发明涉及一种改进的高精度端到端车辆多目标跟踪方法,包括:基于改进的FasterR‑CNN模型对车辆进行检测,得到目标检测数据集;将所述目标检测数据集输入到区域生成网络模块中进行相似度学习,得到待匹配的候选目标数据集,最后通过最近邻匹配方法完成所述待匹配的候选目标数据集的匹配。本发明改进了Quasi‑Dense跟踪方法,结合了注意力机制、自适应等思想,提升模型对于尺度变化较大的目标检测和跟踪的能力,在网络结构中使用空间注意力机制,同时在设定锚框时使用启发式方法,改进模型的跟踪效果,有效的降低了跟踪时ID