
一种基于深度学习的端到端车牌识别方法.pdf

建英****66


1/8

2/8
3/8

4/8

5/8
6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于深度学习的端到端车牌识别方法.pdf
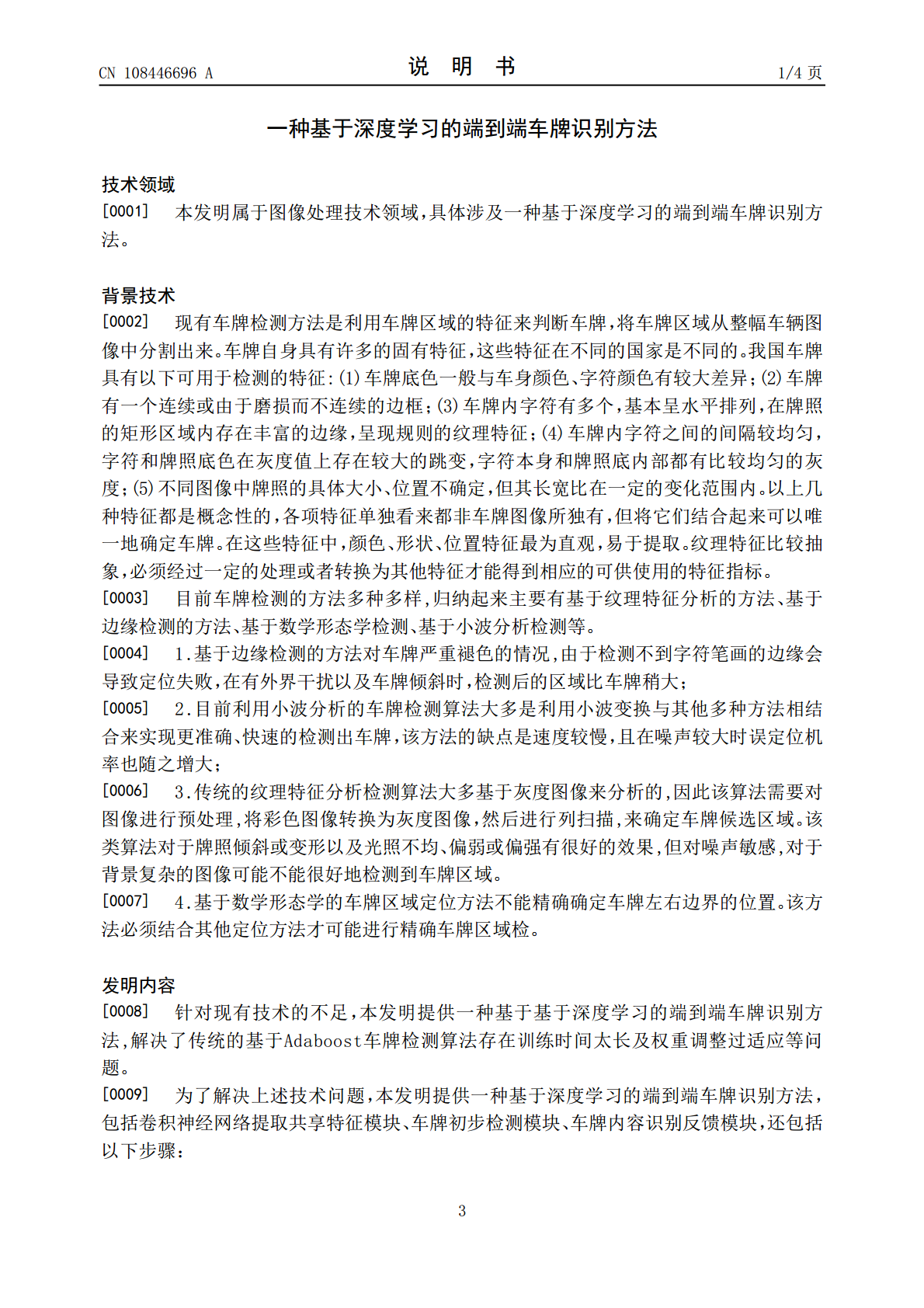
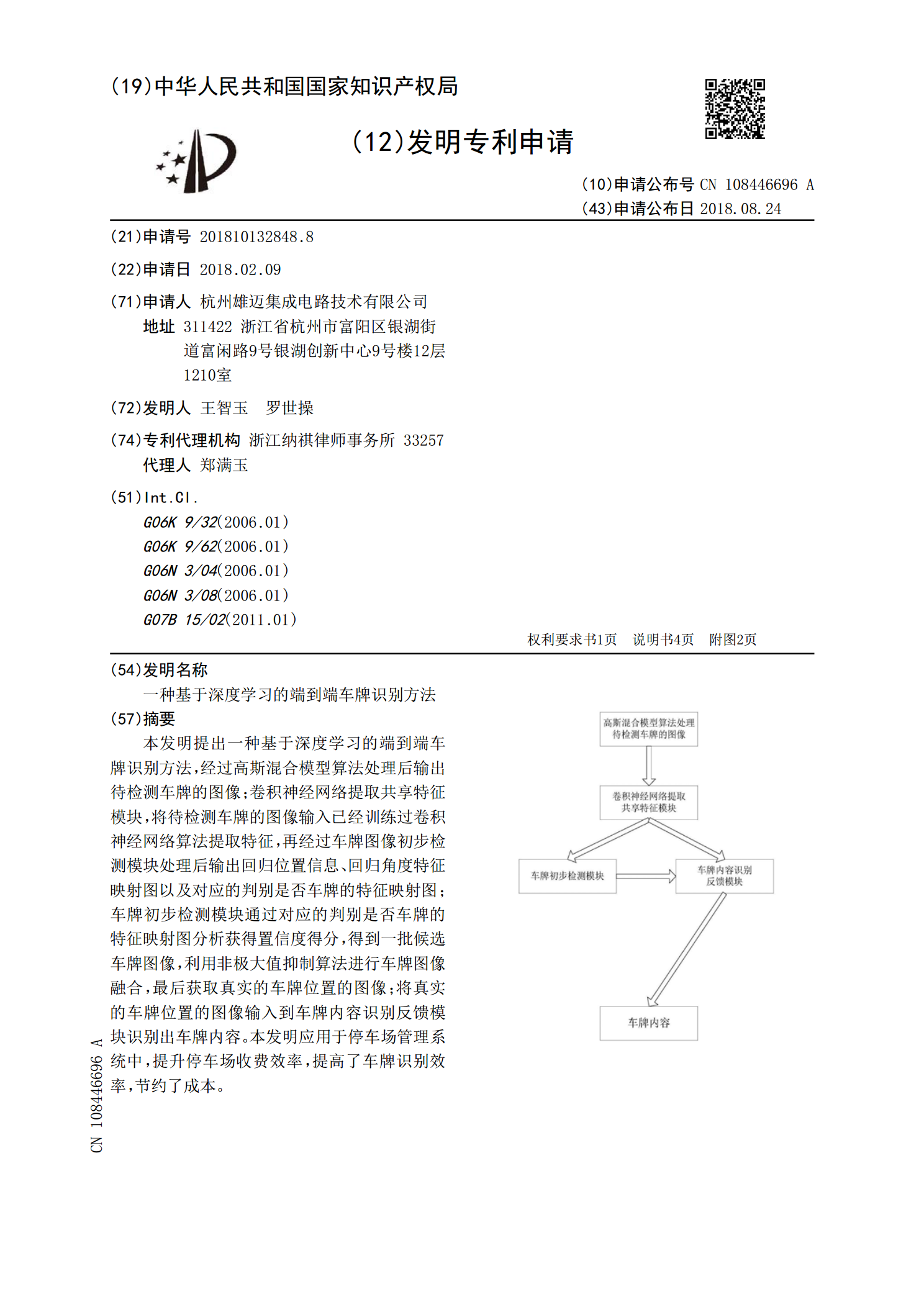
本发明提出一种基于深度学习的端到端车牌识别方法,经过高斯混合模型算法处理后输出待检测车牌的图像;卷积神经网络提取共享特征模块,将待检测车牌的图像输入已经训练过卷积神经网络算法提取特征,再经过车牌图像初步检测模块处理后输出回归位置信息、回归角度特征映射图以及对应的判别是否车牌的特征映射图;车牌初步检测模块通过对应的判别是否车牌的特征映射图分析获得置信度得分,得到一批候选车牌图像,利用非极大值抑制算法进行车牌图像融合,最后获取真实的车牌位置的图像;将真实的车牌位置的图像输入到车牌内容识别反馈模块识别出车牌内容

基于深度学习的端到端乐谱音符识别方法.pdf
本发明公开了基于深度学习的端到端乐谱音符识别方法,该方法一共分为三步:(1)数据预处理:需要从MuseScore中下载对应的数据集,重新编码音高和时值标签。(2)数据增强:对重新编码后的乐谱数据进行数据增强,本发明提出了4种不同的增强方法。(3)端到端模型:应用于端到端乐谱音符识别的深度卷积神经网络模型,将增强后的数据输入的模型,模型的输出为音符时值和音高。本发明在于针对打印体乐谱提出一个基于深度学习的乐谱音符识别模型,即输入整张乐谱图像到该模型,直接输出乐谱上音符的时值和音高,该模型完全端到端,能够精准
一种基于树莓派4B的端到端车牌识别方法.pdf
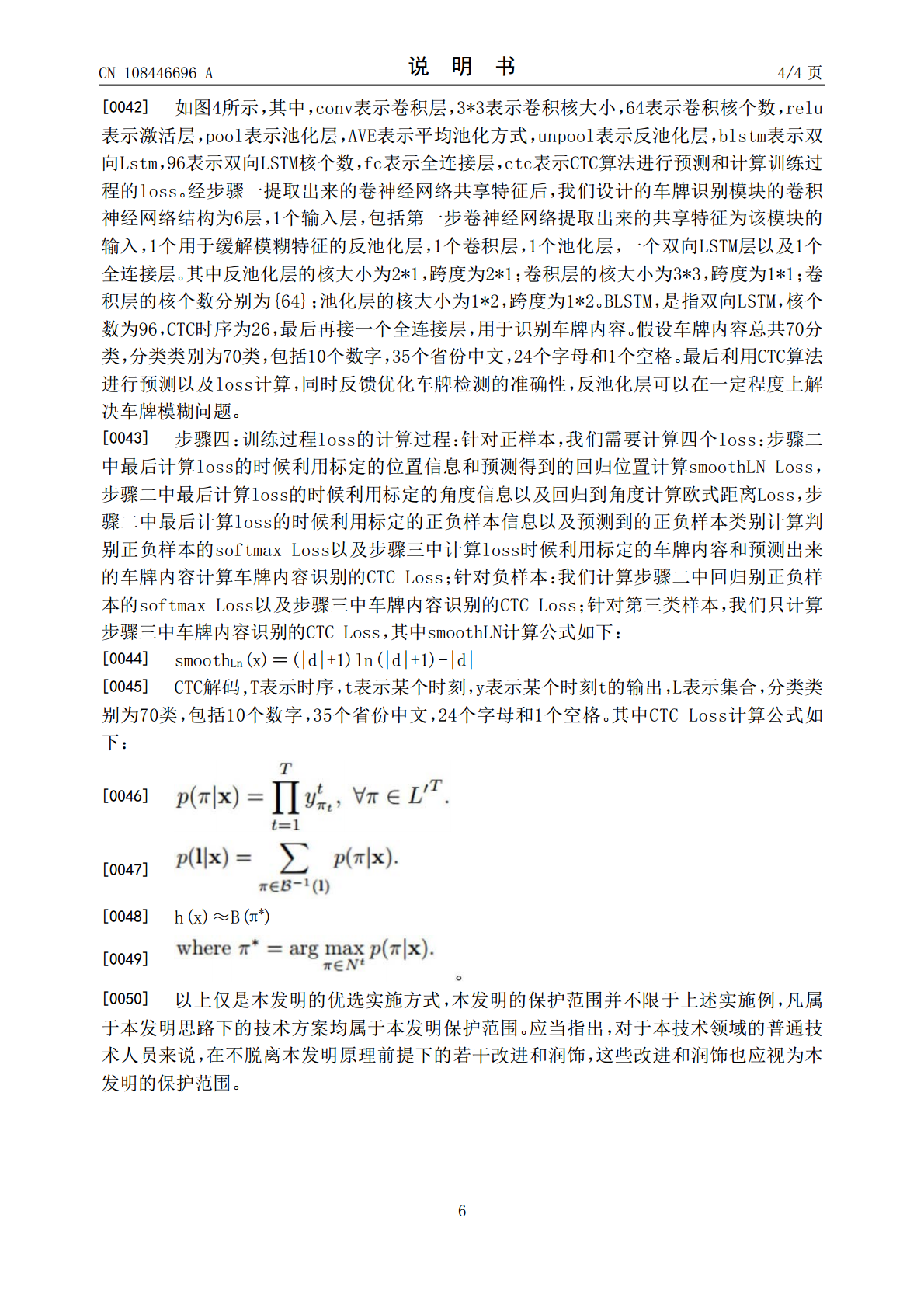
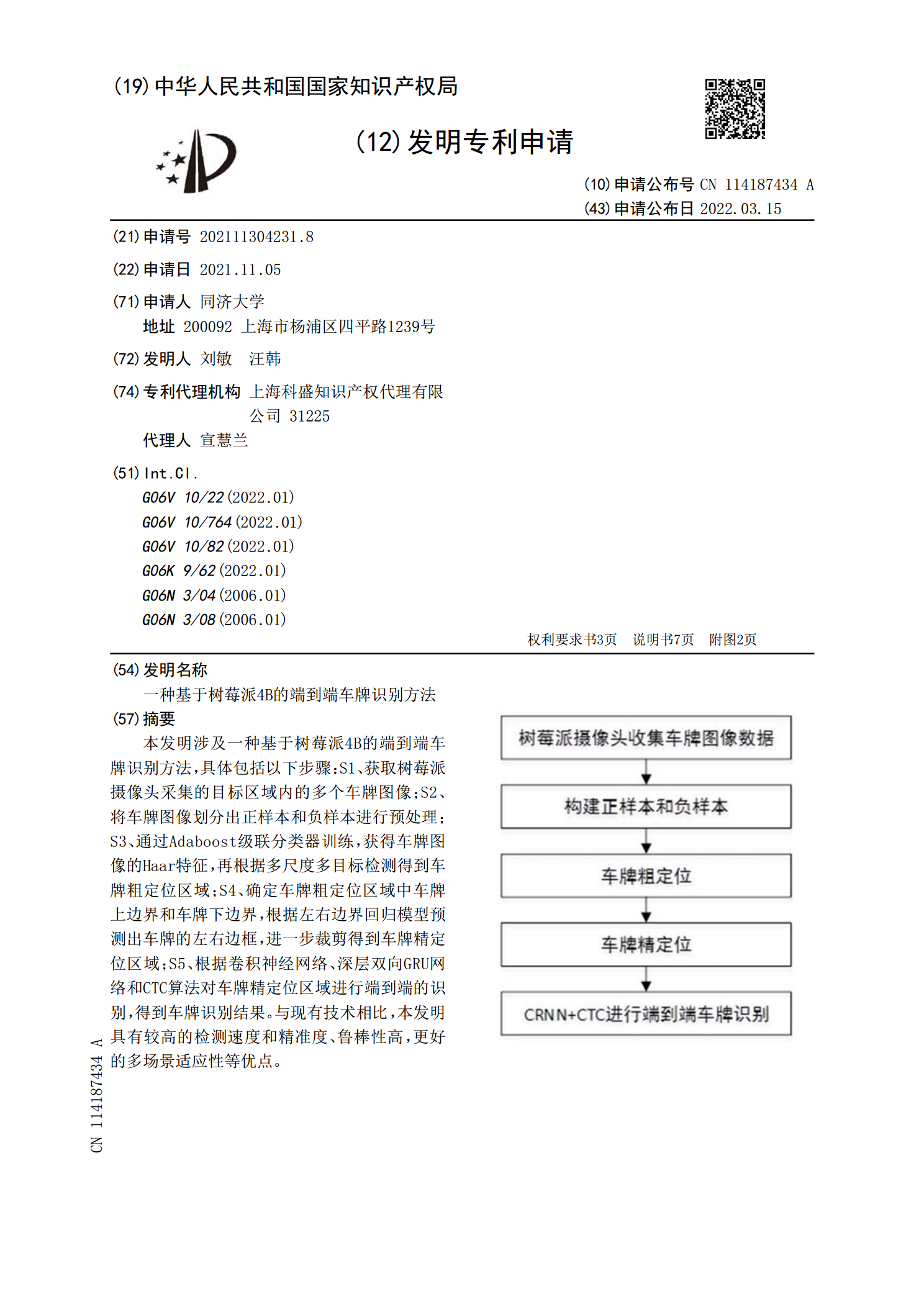
本发明涉及一种基于树莓派4B的端到端车牌识别方法,具体包括以下步骤:S1、获取树莓派摄像头采集的目标区域内的多个车牌图像;S2、将车牌图像划分出正样本和负样本进行预处理;S3、通过Adaboost级联分类器训练,获得车牌图像的Haar特征,再根据多尺度多目标检测得到车牌粗定位区域;S4、确定车牌粗定位区域中车牌上边界和车牌下边界,根据左右边界回归模型预测出车牌的左右边框,进一步裁剪得到车牌精定位区域;S5、根据卷积神经网络、深层双向GRU网络和CTC算法对车牌精定位区域进行端到端的识别,得到车牌识别结果。

一种基于对比学习的端到端音障语音识别方法.pdf
本发明公开了一种基于对比学习的端到端音障语音识别方法,该方法具备语音识别能力前需要使用大量正常发音数据预训练得到一个基本模型,再迁移到音障语音识别的任务中。在训练完成后,本方法就有了音障语音识别的能力。本发明首先对音障语音数据进行频谱图上的数据增强,再通过Transformer模型中的编码器提取隐层信息,然后该隐层信息经过投影模块被提取出低维的隐表示。最后本方法在隐表示所在的低维隐空间上进行对比损失的计算。在解码过程中,解码器直接使用隐层信息进行解码。本发明的创新点在于将对比学习与Transformer模

基于空间转换网络的端到端车牌检测与识别.pptx
基于空间转换网络的端到端车牌检测与识别目录添加目录项标题空间转换网络(STN)的原理空间转换网络的基本概念空间转换网络在车牌检测与识别中的应用空间转换网络的优势与局限性端到端车牌检测与识别的技术流程图像预处理基于深度学习的车牌定位基于空间转换网络的车牌字符分割字符识别与车牌合成实验结果与性能评估实验数据集与实验环境实验结果展示性能评估指标与其他方法的比较应用前景与展望在智能交通系统中的应用在自动驾驶系统中的应用技术发展趋势与挑战感谢观看