
一种改进的高精度端到端车辆多目标跟踪方法.pdf

Do****76


1/10

2/10
3/10

4/10

5/10
6/10

7/10
8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种改进的高精度端到端车辆多目标跟踪方法.pdf
本发明涉及一种改进的高精度端到端车辆多目标跟踪方法,包括:基于改进的FasterR‑CNN模型对车辆进行检测,得到目标检测数据集;将所述目标检测数据集输入到区域生成网络模块中进行相似度学习,得到待匹配的候选目标数据集,最后通过最近邻匹配方法完成所述待匹配的候选目标数据集的匹配。本发明改进了Quasi‑Dense跟踪方法,结合了注意力机制、自适应等思想,提升模型对于尺度变化较大的目标检测和跟踪的能力,在网络结构中使用空间注意力机制,同时在设定锚框时使用启发式方法,改进模型的跟踪效果,有效的降低了跟踪时ID

一种级联检测和匹配的端到端多目标跟踪系统.pdf
本发明涉及智能视频监控和智能安保技术领域,特别是涉及一种级联检测和匹配的端到端多目标跟踪系统,包括输入模块、特征提取模块、输入预处理模块、目标检测模块以及目标数据关联模块;输入模块用于将该图像二元组以孪生形式输入到特征提取模块;特征提取模块采用DLA34网络作为下采样骨干网络,并在每一个下采样节点中加入上采样以实现语义融合;所述输入预处理模块用于将历史帧图像的特征进行融合;目标检测模块基于点的目标检测,定位目标位置,得到检测三元组;目标数据关联模块包括匹配模型和经过训练的基于卷积网络的非线性运动预测模型。

一种端到端的多目标识别、追踪与预测方法.pdf
本发明公开了一种端到端的多目标识别、追踪与预测方法,属于车联网、智能汽车技术领域。本发明方法包括:建立端到端的多目标识别、追踪和预测模型,包括目标检测器、目标追踪模块和轨迹预测模块;目标检测模块使用基于中心点的多目标检测器;目标追踪模块采用基于图卷积神经网络对多目标追踪;轨迹预测模块基于图网络对多目标进行运动轨迹预测,包括轨迹目的点的预测,智能体间信息传递,生成未来轨迹;本发明将端到端的多目标识别、追踪和预测模型作为一个整体,采用联合训练框架进行同时训练。本发明三个模块同时训练、相互促进,进一步提高了最终
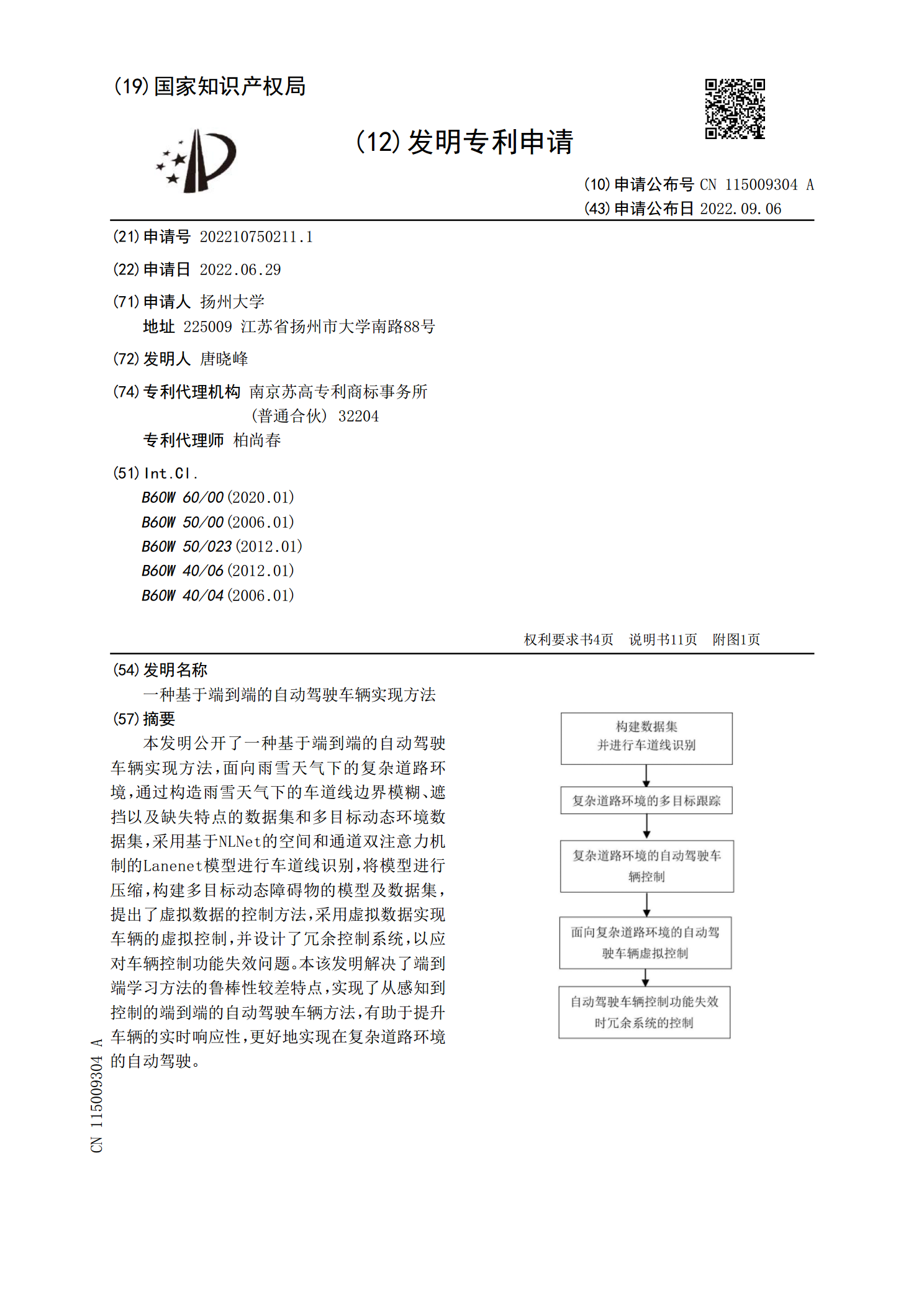
一种基于端到端的自动驾驶车辆实现方法.pdf
本发明公开了一种基于端到端的自动驾驶车辆实现方法,面向雨雪天气下的复杂道路环境,通过构造雨雪天气下的车道线边界模糊、遮挡以及缺失特点的数据集和多目标动态环境数据集,采用基于NLNet的空间和通道双注意力机制的Lanenet模型进行车道线识别,将模型进行压缩,构建多目标动态障碍物的模型及数据集,提出了虚拟数据的控制方法,采用虚拟数据实现车辆的虚拟控制,并设计了冗余控制系统,以应对车辆控制功能失效问题。本该发明解决了端到端学习方法的鲁棒性较差特点,实现了从感知到控制的端到端的自动驾驶车辆方法,有助于提升车辆的
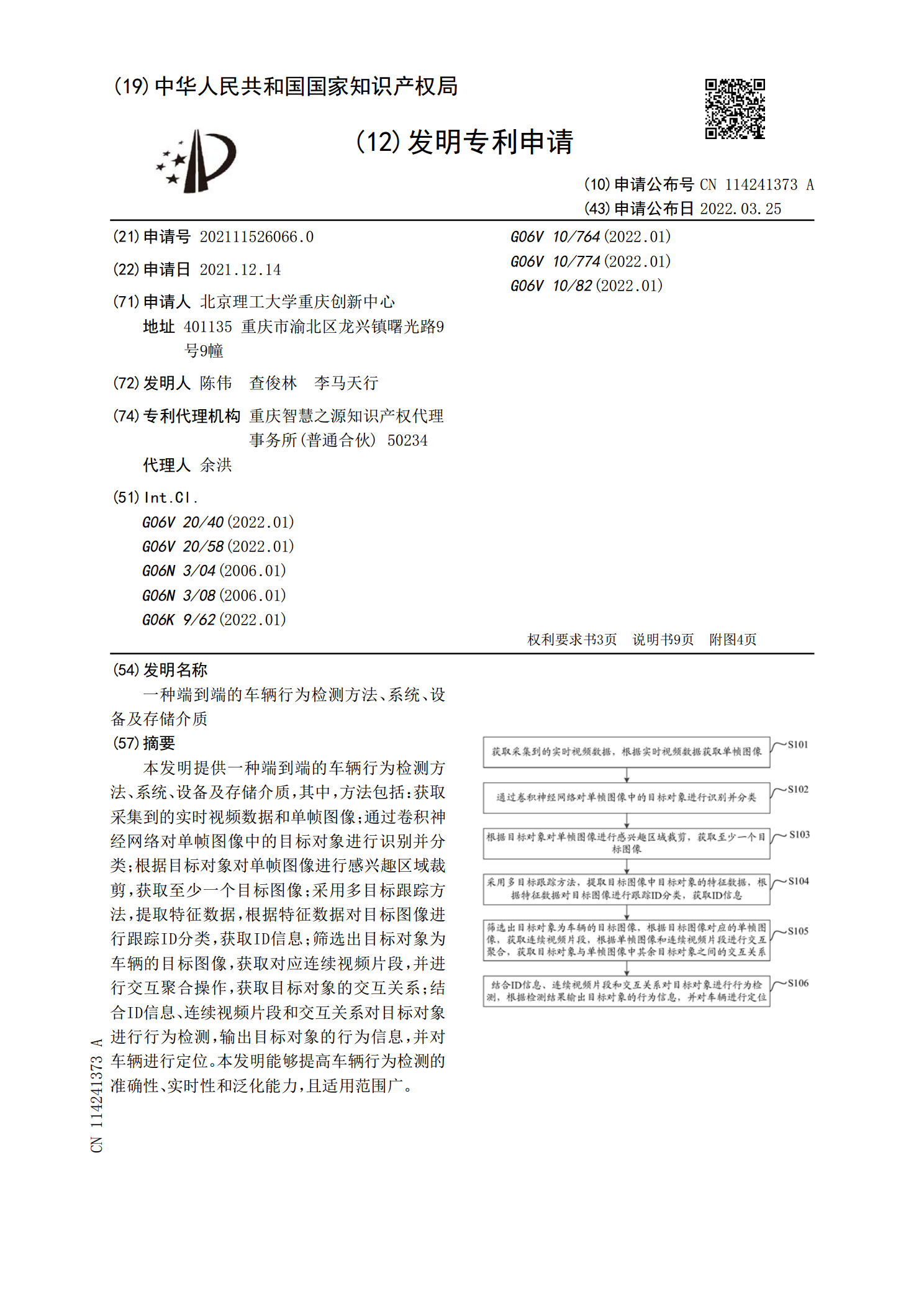
一种端到端的车辆行为检测方法、系统、设备及存储介质.pdf
本发明提供一种端到端的车辆行为检测方法、系统、设备及存储介质,其中,方法包括:获取采集到的实时视频数据和单帧图像;通过卷积神经网络对单帧图像中的目标对象进行识别并分类;根据目标对象对单帧图像进行感兴趣区域裁剪,获取至少一个目标图像;采用多目标跟踪方法,提取特征数据,根据特征数据对目标图像进行跟踪ID分类,获取ID信息;筛选出目标对象为车辆的目标图像,获取对应连续视频片段,并进行交互聚合操作,获取目标对象的交互关系;结合ID信息、连续视频片段和交互关系对目标对象进行行为检测,输出目标对象的行为信息,并对车辆