
一种基于势场蚁群算法的导弹编队避障方法.pdf

努力****妙风

1/10

2/10

3/10
4/10

5/10
6/10

7/10

8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
一种基于势场蚁群算法的导弹编队避障方法.pdf
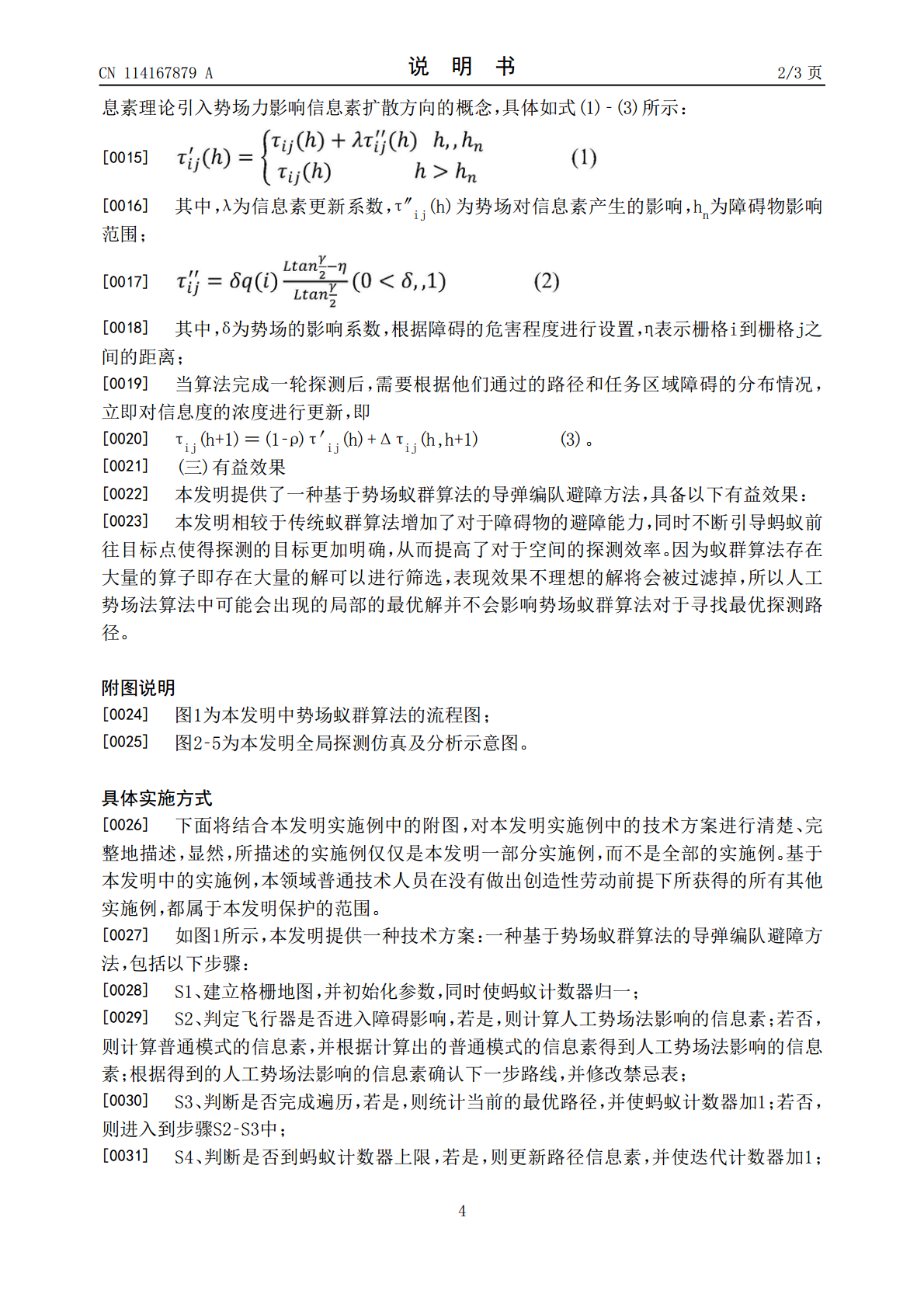
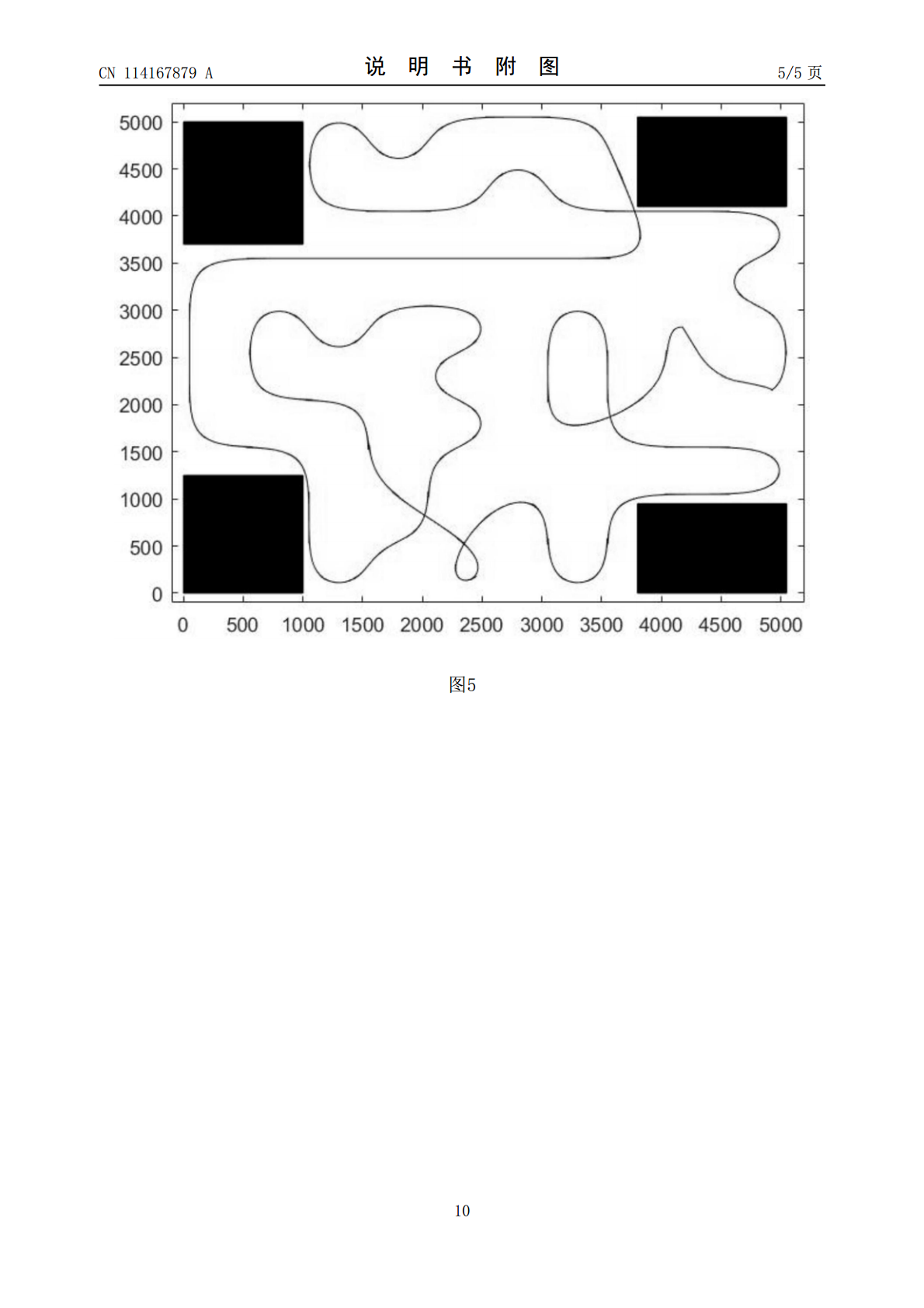
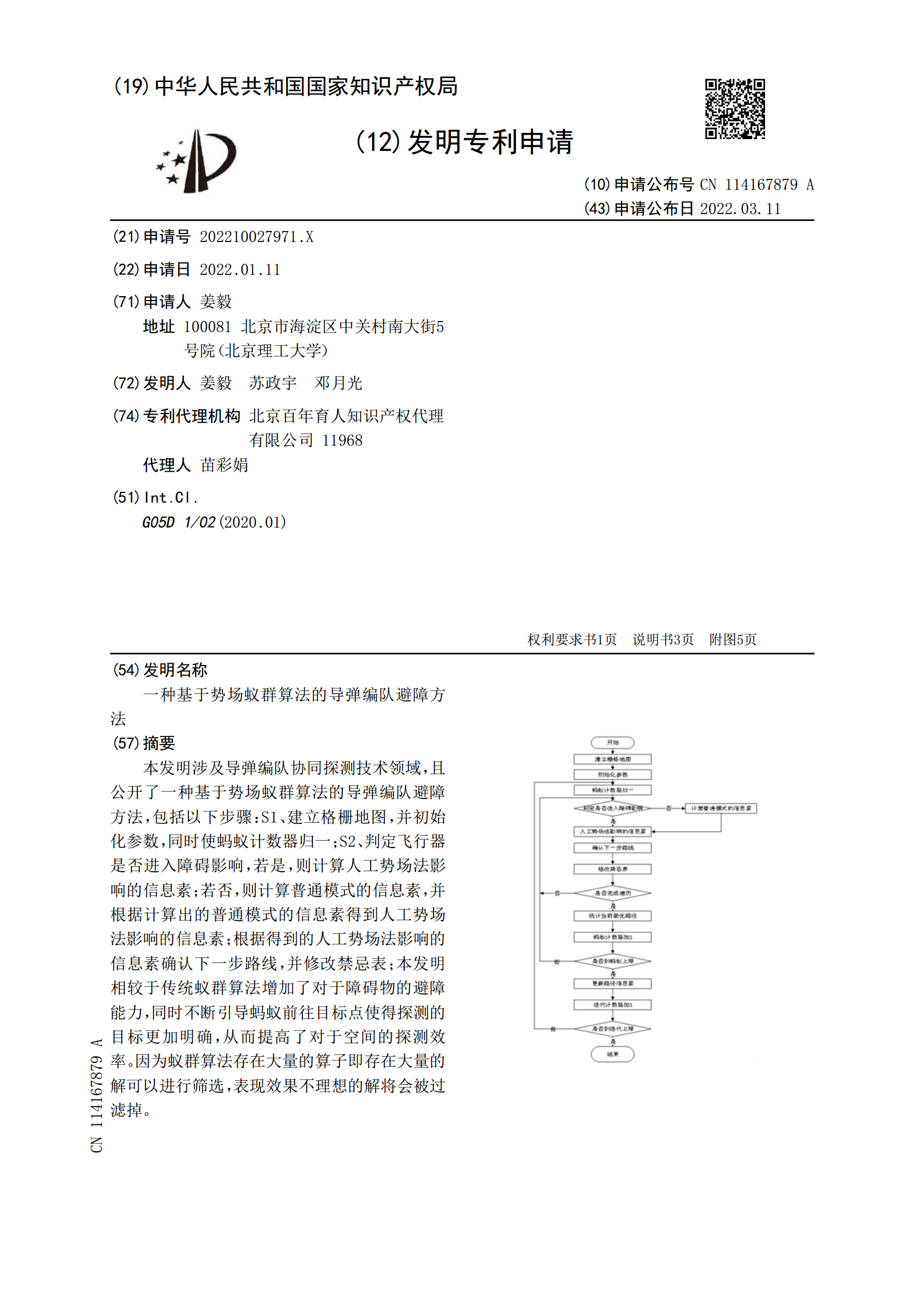
本发明涉及导弹编队协同探测技术领域,且公开了一种基于势场蚁群算法的导弹编队避障方法,包括以下步骤:S1、建立格栅地图,并初始化参数,同时使蚂蚁计数器归一;S2、判定飞行器是否进入障碍影响,若是,则计算人工势场法影响的信息素;若否,则计算普通模式的信息素,并根据计算出的普通模式的信息素得到人工势场法影响的信息素;根据得到的人工势场法影响的信息素确认下一步路线,并修改禁忌表;本发明相较于传统蚁群算法增加了对于障碍物的避障能力,同时不断引导蚂蚁前往目标点使得探测的目标更加明确,从而提高了对于空间的探测效率。因为
基于改进人工势场方法的多无人机编队避障算法.pptx
,目录PartOnePartTwo人工势场方法的原理传统人工势场方法的局限性改进人工势场方法的必要性PartThree障碍物对无人机的斥力计算无人机之间的引力计算斥力和引力的平衡与优化无人机编队避障的路径规划PartFour无人机编队系统的构建改进人工势场方法在避障中的应用算法的实时性优化算法的鲁棒性验证PartFive实验场景与条件实验结果展示结果分析与其他算法的比较PartSix基于改进人工势场方法的多无人机编队避障算法的优势与不足在实际应用中的潜在价值对未来研究的展望THANKS

基于人工势场的UAV编队避障研究.docx
基于人工势场的UAV编队避障研究摘要:无人机编队技术已经成为了当前无人机技术发展的重要领域。其中,无人机编队避障技术是无人机编队实施飞行任务的重要保障。本文主要探讨了基于人工势场的UAV编队避障研究,重点介绍了基于人工势场的无人机编队避障的原理及算法,并结合实例进行了模拟验证。关键词:无人机编队;避障;人工势场一、引言随着无人机技术的不断发展,无人机编队技术已经成为了当前无人机技术发展的重要领域。无人机编队技术可以实现多架无人机在同一个空域内协调飞行,从而实现统一调度和指挥控制,达到优化垂直起降、提高空战

一种基于人工势场法的车辆编队避障控制方法.pdf
一种基于人工势场法的车辆编队避障控制方法,首先建立本车的运动学模型,根据道路环境和车辆跟驰情况构建道路势场和车辆避撞势场;然后将道路抽象为轨迹,对该轨迹进行跟踪,利用反步法设计车辆跟踪控制器;并设计势能控制器规范车辆行进、避免车辆相撞与撞到障碍,该控制器为切换控制器,在人工势场仅在触发条件满足的情况下发挥作用。本发明能够保证车辆队列快速高效、顺利通过障碍物,完成避障后较快恢复编队行驶。
基于势场蚁群算法的多机器人编队研究.pptx
汇报人:CONTENTSPARTONEPARTTWO势场蚁群算法的基本原理势场蚁群算法的特性和优势势场蚁群算法在多机器人编队中的应用PARTTHREE多机器人编队的概念和意义多机器人编队的关键技术多机器人编队的研究现状和发展趋势PARTFOUR基于势场蚁群算法的多机器人编队模型建立基于势场蚁群算法的多机器人编队路径规划基于势场蚁群算法的多机器人编队协同控制PARTFIVE实验设置与实验环境实验结果展示结果分析与其他算法的比较分析PARTSIX研究结论研究不足与展望汇报人: