
基于势场蚁群算法的多机器人编队研究.pptx

快乐****蜜蜂

1/10
2/10

3/10
4/10

5/10
6/10

7/10

8/10
9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于势场蚁群算法的多机器人编队研究.pptx
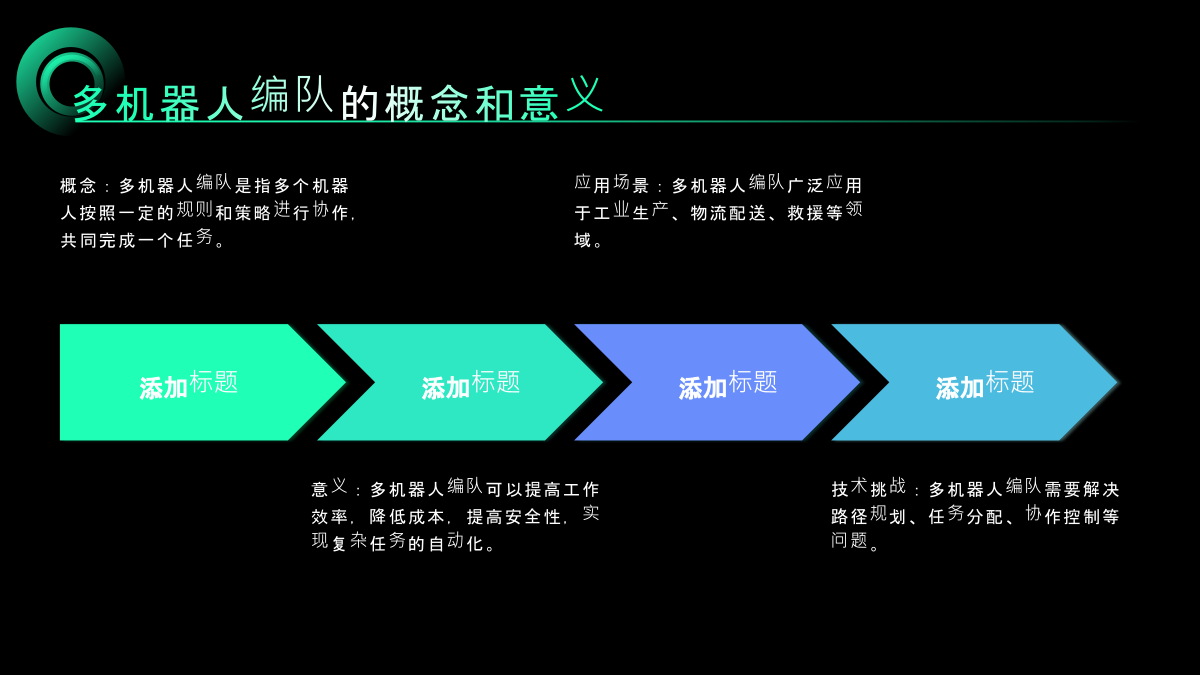
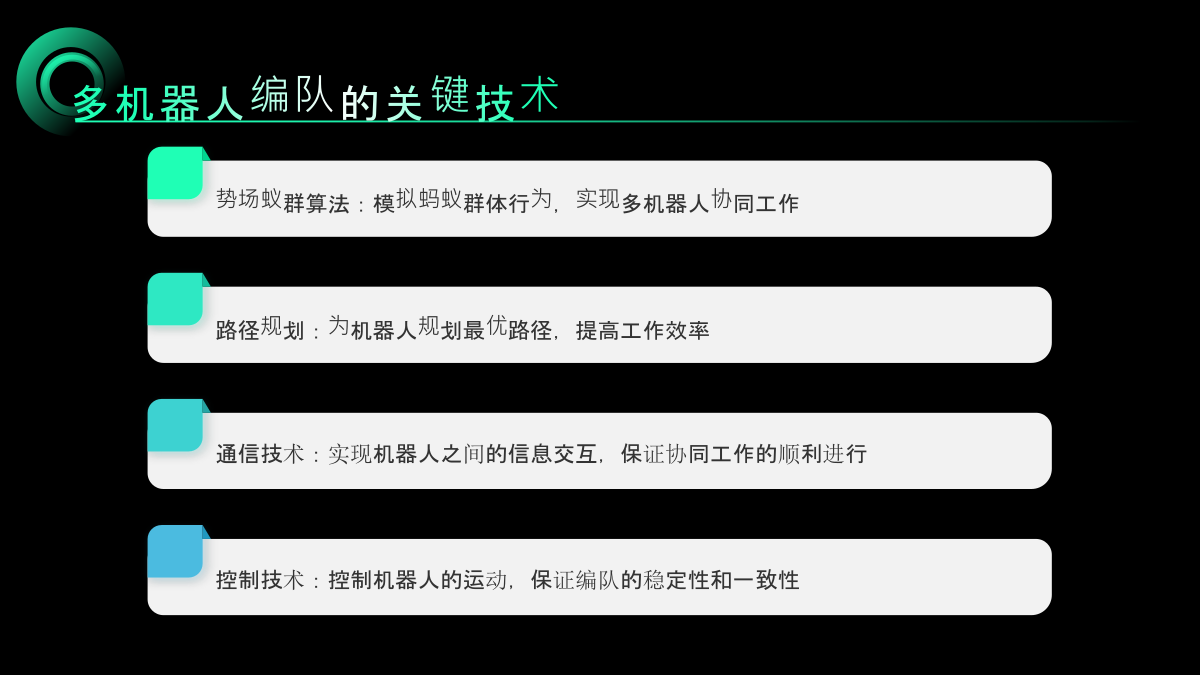
汇报人:CONTENTSPARTONEPARTTWO势场蚁群算法的基本原理势场蚁群算法的特性和优势势场蚁群算法在多机器人编队中的应用PARTTHREE多机器人编队的概念和意义多机器人编队的关键技术多机器人编队的研究现状和发展趋势PARTFOUR基于势场蚁群算法的多机器人编队模型建立基于势场蚁群算法的多机器人编队路径规划基于势场蚁群算法的多机器人编队协同控制PARTFIVE实验设置与实验环境实验结果展示结果分析与其他算法的比较分析PARTSIX研究结论研究不足与展望汇报人:
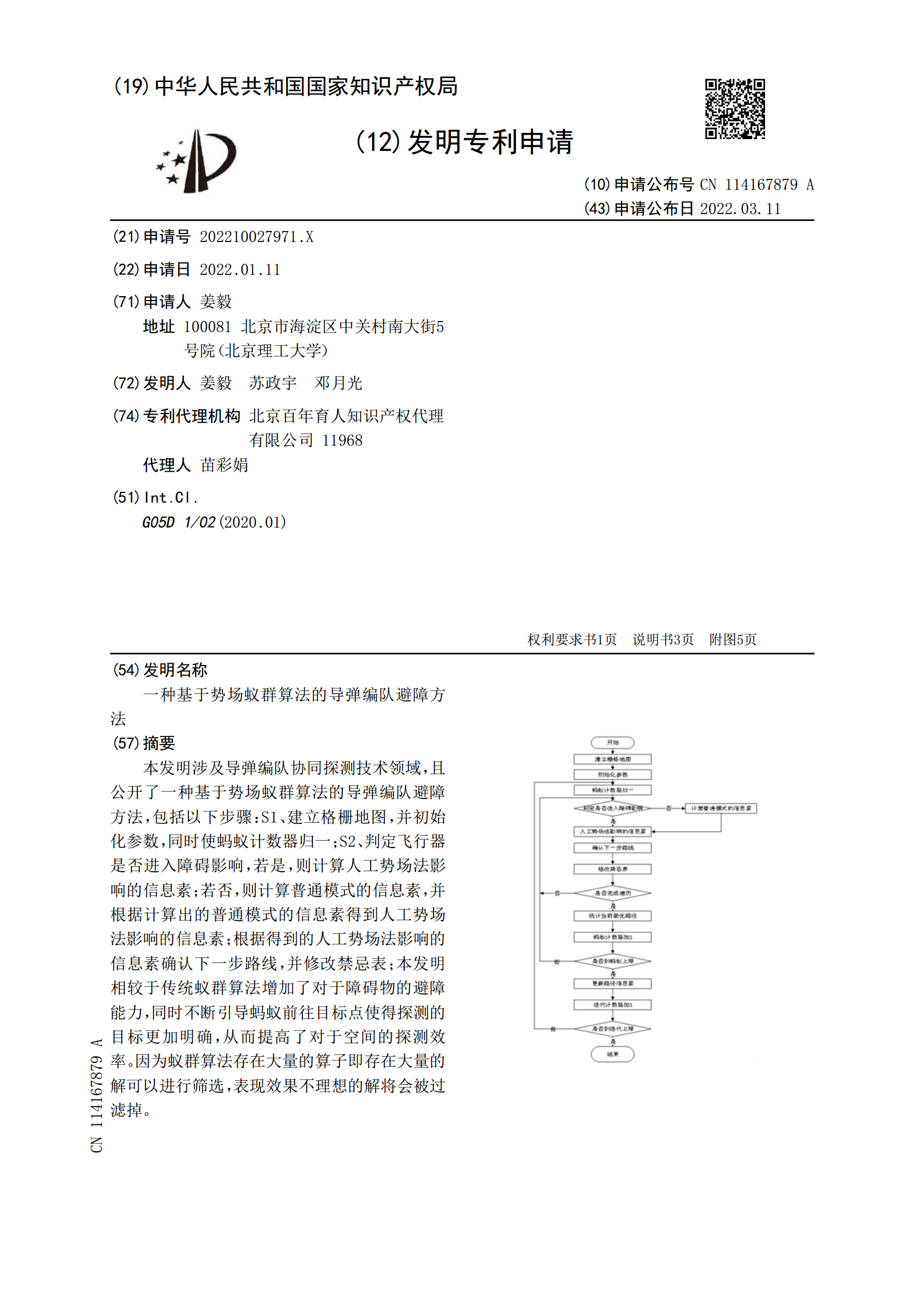
一种基于势场蚁群算法的导弹编队避障方法.pdf
本发明涉及导弹编队协同探测技术领域,且公开了一种基于势场蚁群算法的导弹编队避障方法,包括以下步骤:S1、建立格栅地图,并初始化参数,同时使蚂蚁计数器归一;S2、判定飞行器是否进入障碍影响,若是,则计算人工势场法影响的信息素;若否,则计算普通模式的信息素,并根据计算出的普通模式的信息素得到人工势场法影响的信息素;根据得到的人工势场法影响的信息素确认下一步路线,并修改禁忌表;本发明相较于传统蚁群算法增加了对于障碍物的避障能力,同时不断引导蚂蚁前往目标点使得探测的目标更加明确,从而提高了对于空间的探测效率。因为

基于势场蚁群算法的机器人全局路径规划.docx
基于势场蚁群算法的机器人全局路径规划一、前言随着机器人技术的不断发展,机器人已经成为日常生活中不可或缺的一部分。然而,机器人在其运动的过程中,需要处理大量的运动控制、状态估计、感知与识别等问题。全局路径规划是机器人技术领域中一个非常重要的问题,它负责为机器人规划一条最优的、可行的路径,使机器人能够在避免障碍物的同时到达目标点。因此,本文将介绍一种基于势场蚁群算法的机器人全局路径规划方法。二、背景机器人全局路径规划问题是机器人领域中的核心之一,这是因为机器人在执行任务过程中通常都需要通过避开障碍物,到达目标

基于改进势场蚁群算法的自动引导小车路径规划研究.docx
基于改进势场蚁群算法的自动引导小车路径规划研究基于改进势场蚁群算法的自动引导小车路径规划研究摘要:随着智能交通系统的发展,自动引导小车在物流和仓储领域的应用越来越广泛。然而,传统的路径规划算法在复杂环境下的性能较差。为了解决这个问题,本文提出了一种基于改进势场蚁群算法的自动引导小车路径规划方法。该方法继承了势场蚁群算法的优势,同时引入了新的启发式信息,在复杂环境下能够更好地选择路径,提高路径规划的效果和速度。关键词:自动引导小车,路径规划,势场蚁群算法,启发式信息1.引言自动引导小车是一种能够自主导航和运

基于改进势场蚁群算法的移动机器人最优路径规划.pptx
基于改进势场蚁群算法的移动机器人最优路径规划目录添加章节标题改进势场蚁群算法蚁群算法原理势场蚁群算法的优缺点改进势场蚁群算法的策略改进后算法的优点移动机器人路径规划移动机器人路径规划概述传统路径规划算法的局限性改进势场蚁群算法在路径规划中的应用算法实现流程最优路径规划实验结果实验环境与参数设置实验结果分析与传统算法的比较最优路径规划的实现最优路径规划的应用前景在智能交通领域的应用在仓储物流领域的应用在救援机器人领域的应用在其他领域的应用前景总结与展望本文工作总结未来研究方向THANKYOU