
点云缺失处理方法、装置和存储介质.pdf

文光****iu


1/10

2/10

3/10
4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共16页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
点云缺失处理方法、装置和存储介质.pdf
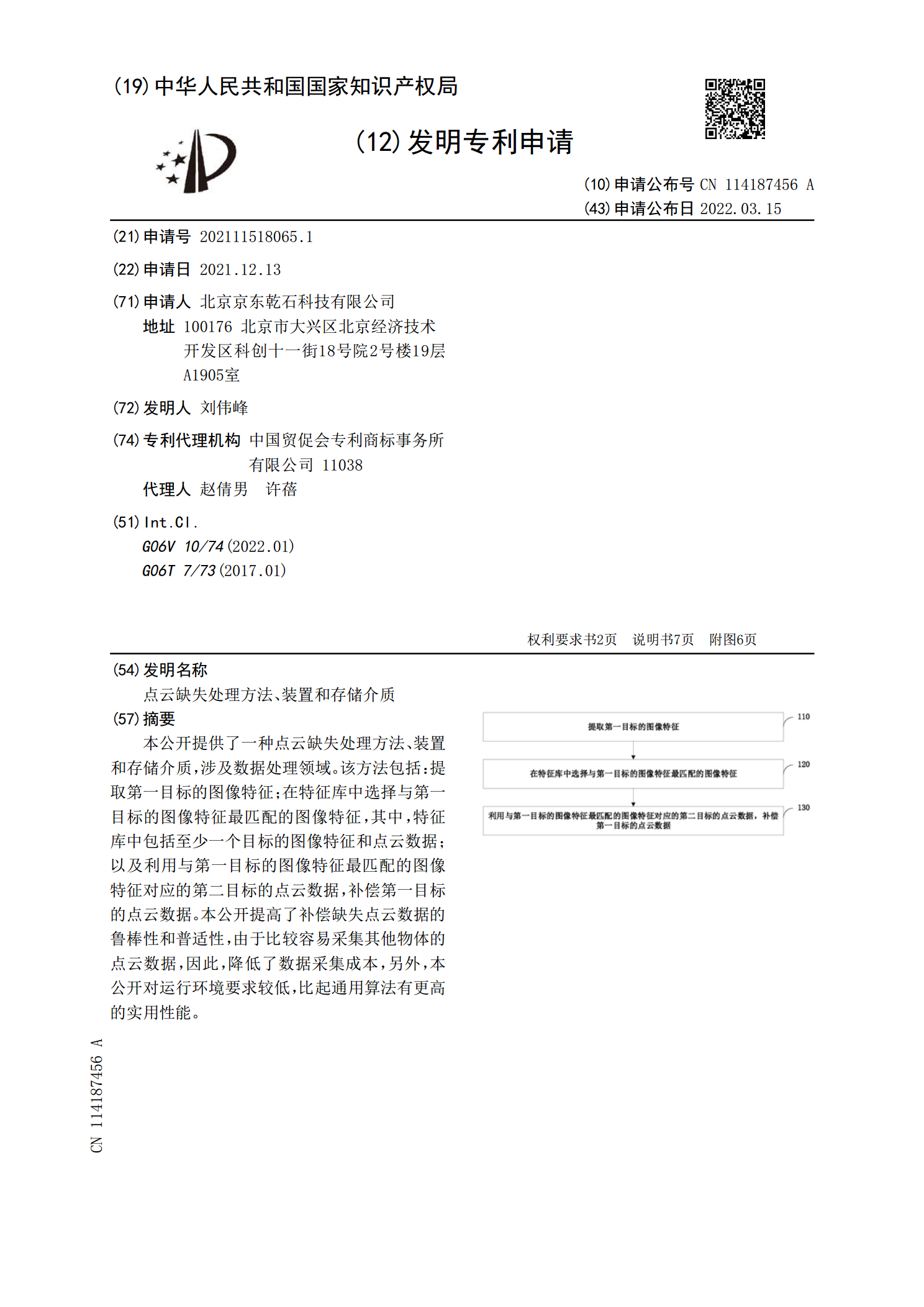
本公开提供了一种点云缺失处理方法、装置和存储介质,涉及数据处理领域。该方法包括:提取第一目标的图像特征;在特征库中选择与第一目标的图像特征最匹配的图像特征,其中,特征库中包括至少一个目标的图像特征和点云数据;以及利用与第一目标的图像特征最匹配的图像特征对应的第二目标的点云数据,补偿第一目标的点云数据。本公开提高了补偿缺失点云数据的鲁棒性和普适性,由于比较容易采集其他物体的点云数据,因此,降低了数据采集成本,另外,本公开对运行环境要求较低,比起通用算法有更高的实用性能。
点云数据的处理方法、装置、电子设备和存储介质.pdf
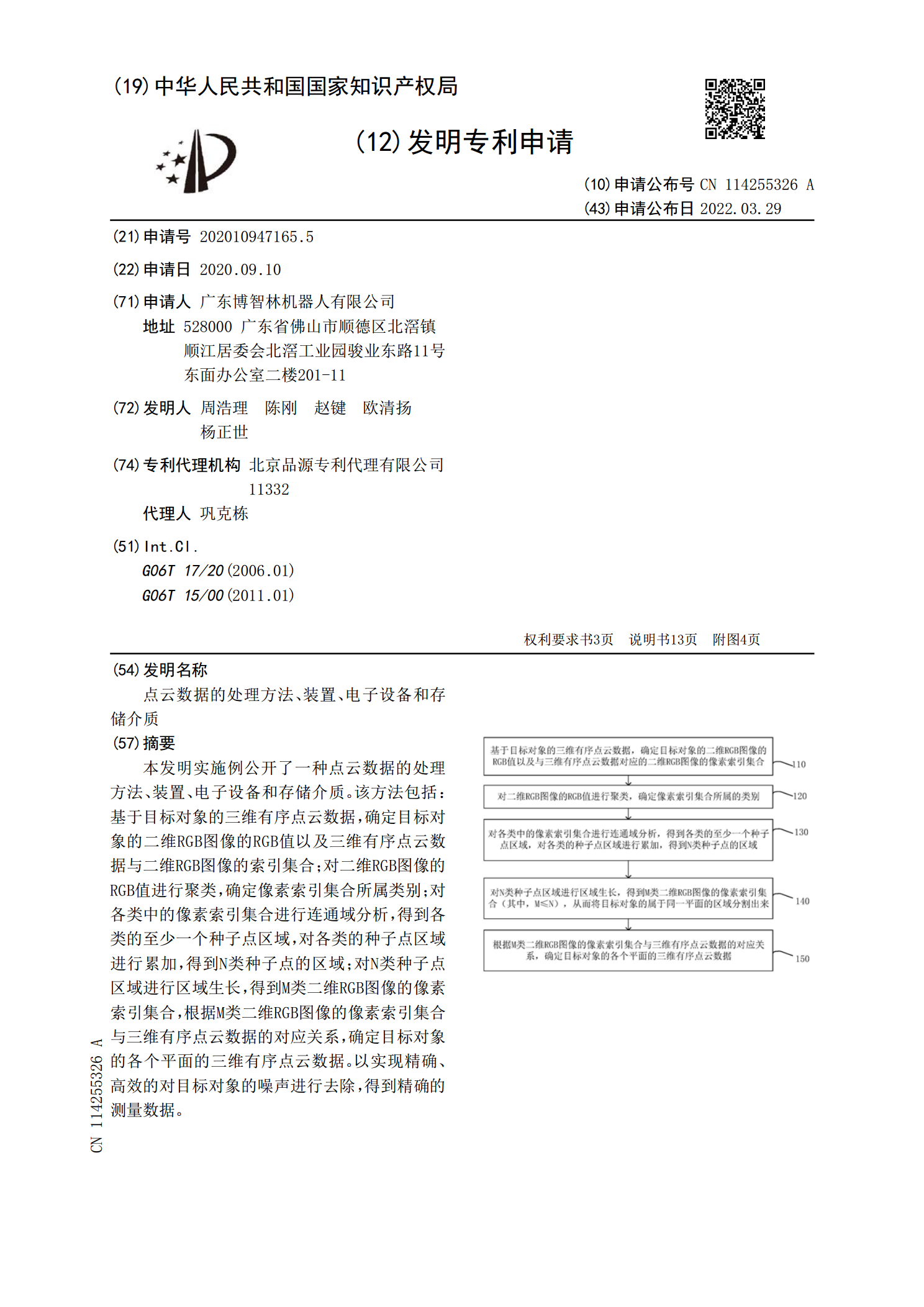
本发明实施例公开了一种点云数据的处理方法、装置、电子设备和存储介质。该方法包括:基于目标对象的三维有序点云数据,确定目标对象的二维RGB图像的RGB值以及三维有序点云数据与二维RGB图像的索引集合;对二维RGB图像的RGB值进行聚类,确定像素索引集合所属类别;对各类中的像素索引集合进行连通域分析,得到各类的至少一个种子点区域,对各类的种子点区域进行累加,得到N类种子点的区域;对N类种子点区域进行区域生长,得到M类二维RGB图像的像素索引集合,根据M类二维RGB图像的像素索引集合与三维有序点云数据的对应关系
点云数据处理方法、装置、存储介质及电子装置.pdf
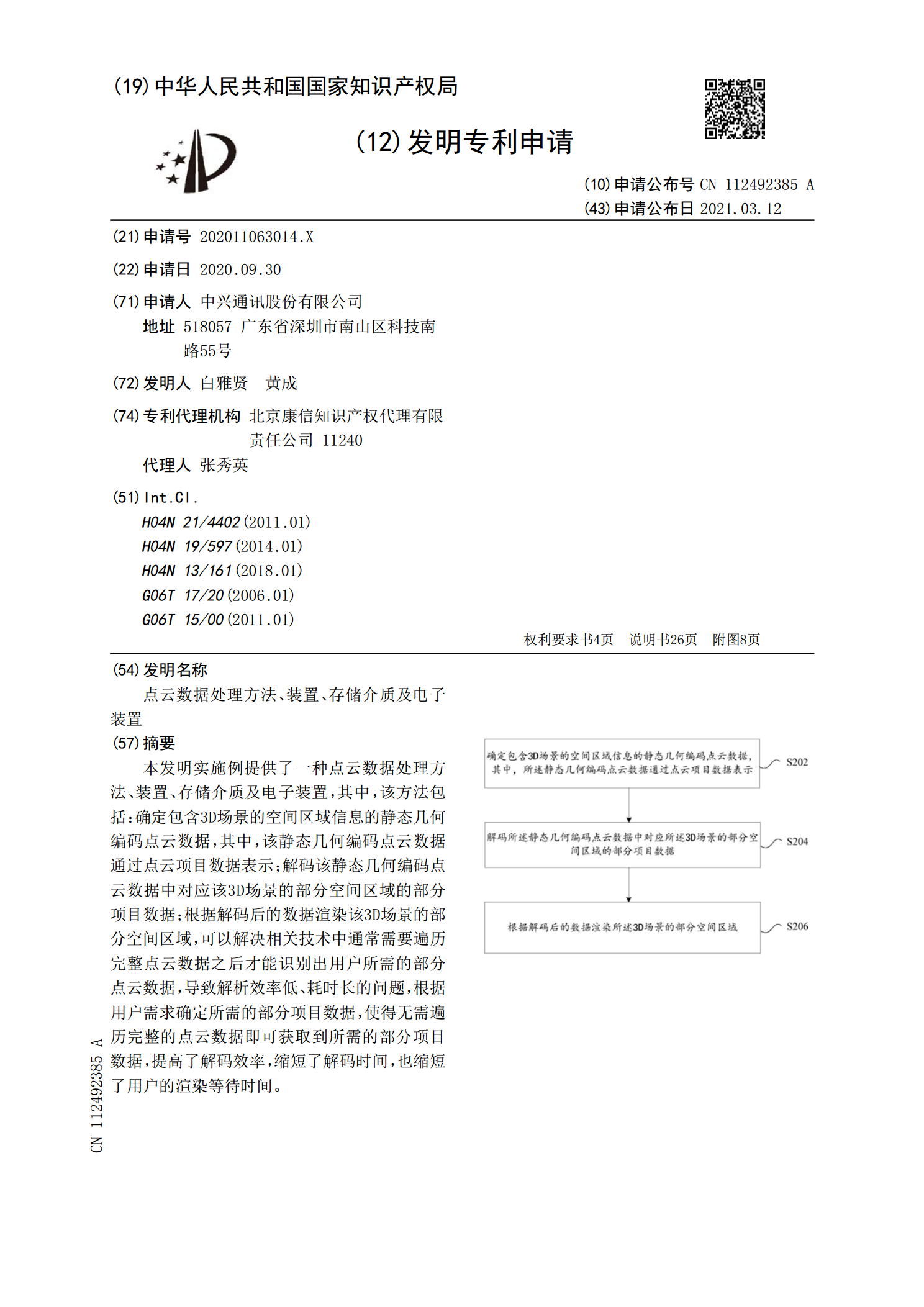
本发明实施例提供了一种点云数据处理方法、装置、存储介质及电子装置,其中,该方法包括:确定包含3D场景的空间区域信息的静态几何编码点云数据,其中,该静态几何编码点云数据通过点云项目数据表示;解码该静态几何编码点云数据中对应该3D场景的部分空间区域的部分项目数据;根据解码后的数据渲染该3D场景的部分空间区域,可以解决相关技术中通常需要遍历完整点云数据之后才能识别出用户所需的部分点云数据,导致解析效率低、耗时长的问题,根据用户需求确定所需的部分项目数据,使得无需遍历完整的点云数据即可获取到所需的部分项目数据,提
点云数据的处理及渲染方法、装置、设备及存储介质.pdf
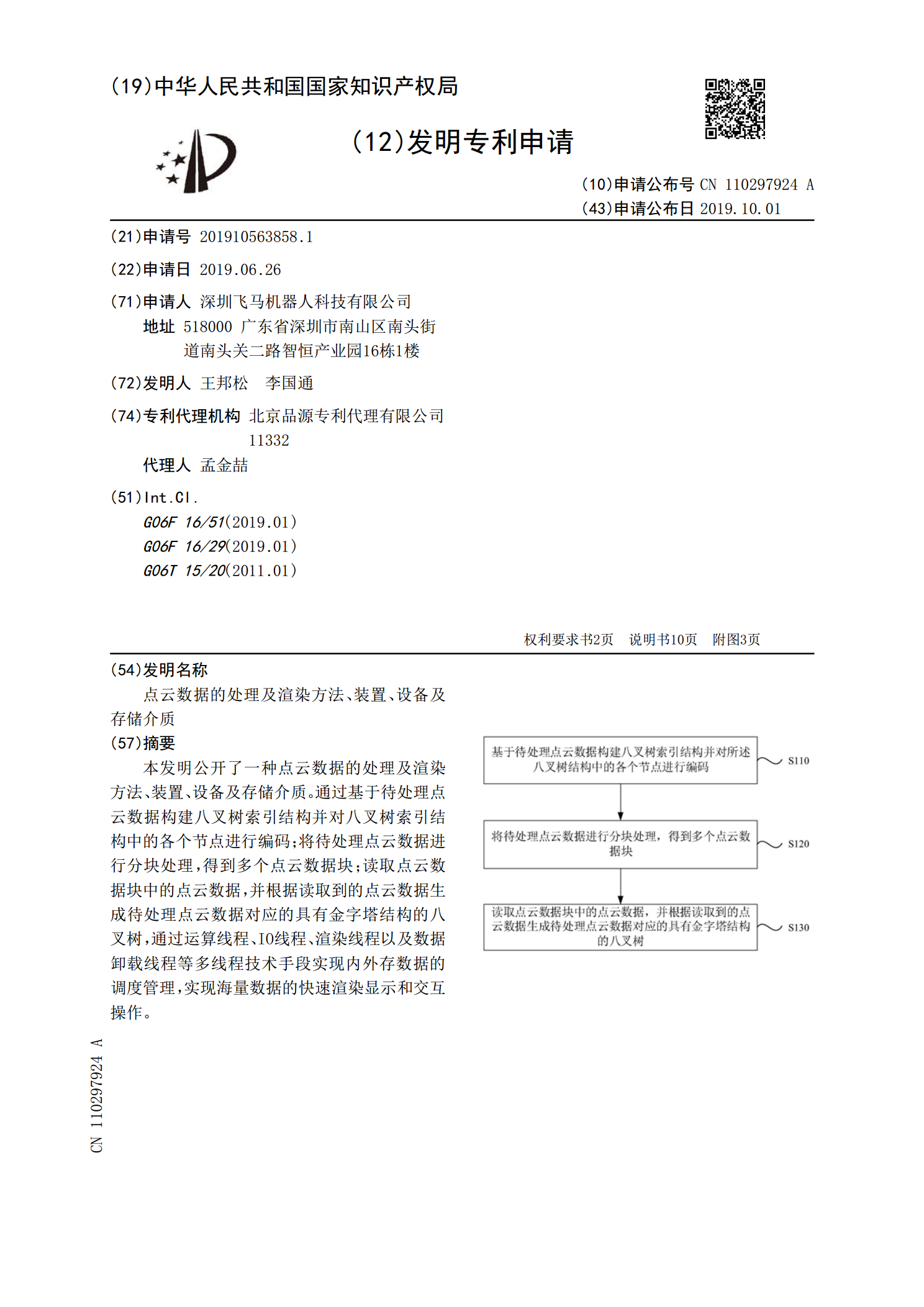
本发明公开了一种点云数据的处理及渲染方法、装置、设备及存储介质。通过基于待处理点云数据构建八叉树索引结构并对八叉树索引结构中的各个节点进行编码;将待处理点云数据进行分块处理,得到多个点云数据块;读取点云数据块中的点云数据,并根据读取到的点云数据生成待处理点云数据对应的具有金字塔结构的八叉树,通过运算线程、IO线程、渲染线程以及数据卸载线程等多线程技术手段实现内外存数据的调度管理,实现海量数据的快速渲染显示和交互操作。

一种点云处理方法、装置、计算设备和存储介质.pdf
本公开提供了一种点云处理方法、装置、计算设备和和存储介质,该点云处理方法包括:获取初始点云帧中的物体状态;根据初始点云帧中的物体状态提取初始点云帧中的物体点云;根据形状模型和初始点云帧中的物体点云计算初始点云帧的形状编码,所述形状编码用于表征物体的表面形状;以及根据初始点云帧的形状编码和物体状态计算点云序列其他点云帧中对应物体的物体状态和/或形状编码。本公开实施例根据形状模型联合了物体跟踪和形状重建,提高了物体跟踪的准确度和形状重建的保真度。