
自动泊车方法、系统、计算机可读存储介质及车机端.pdf

增梅****主啊

1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10

9/10
10/10
亲,该文档总共22页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
自动泊车方法、系统、计算机可读存储介质及车机端.pdf
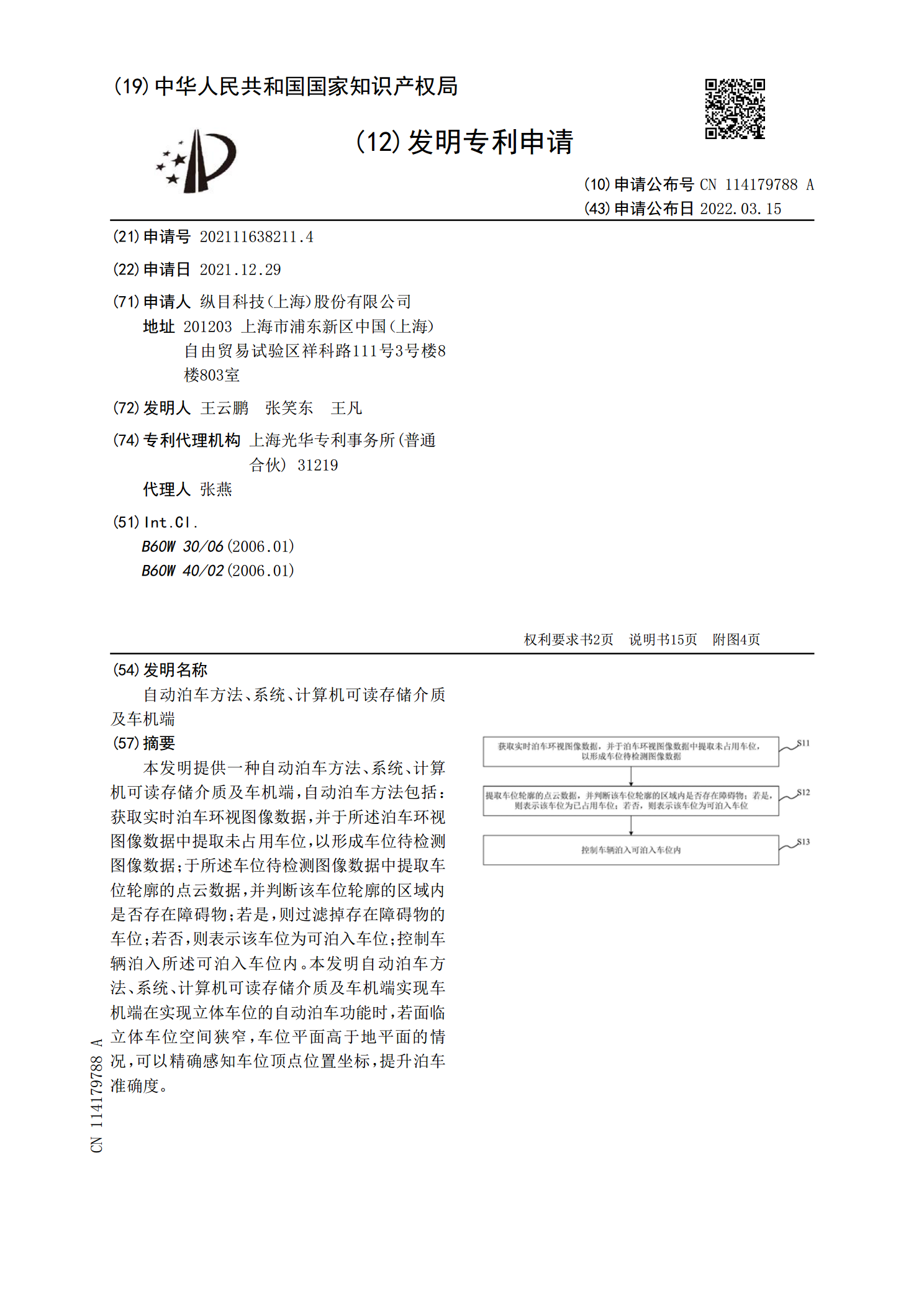
本发明提供一种自动泊车方法、系统、计算机可读存储介质及车机端,自动泊车方法包括:获取实时泊车环视图像数据,并于所述泊车环视图像数据中提取未占用车位,以形成车位待检测图像数据;于所述车位待检测图像数据中提取车位轮廓的点云数据,并判断该车位轮廓的区域内是否存在障碍物;若是,则过滤掉存在障碍物的车位;若否,则表示该车位为可泊入车位;控制车辆泊入所述可泊入车位内。本发明自动泊车方法、系统、计算机可读存储介质及车机端实现车机端在实现立体车位的自动泊车功能时,若面临立体车位空间狭窄,车位平面高于地平面的情况,可以精确

自动泊车方法、系统及可读存储介质.pdf
本发明公开了一种自动泊车方法、系统及可读存储介质,该方法包括步骤:响应于第一设备发送的开始泊车指令,获取车内人员情况信息,并确定所述车内人员情况信息是否满足预设泊车条件;若满足,则接管对车辆的控制功能;获取预设泊车路线,并基于所述预设泊车路线和所述控制功能,对所述车辆进行泊车。实现了在响应第一设备发送的开始泊车指令之后,自动获取车内人员情况信息,并在车内人员情况信息满足预设泊车条件时,才接管对车辆的控制功能以及获取预设泊车路线以进行泊车。避免了在泊车过程中,对仍然留在车内的人员造成伤害,进而提高了车辆的自
激活自动泊车的系统、方法及计算机可读存储介质.pdf
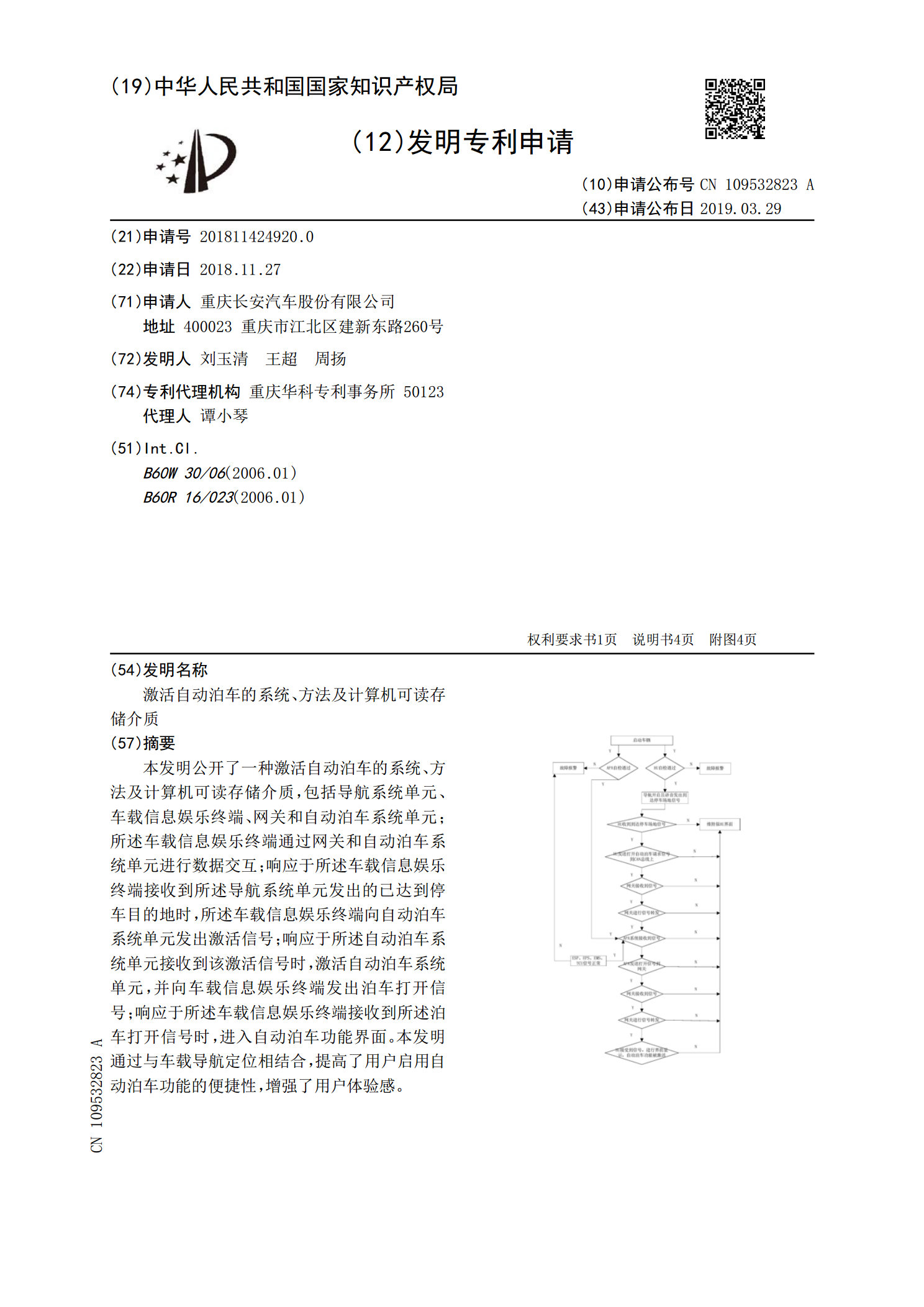
本发明公开了一种激活自动泊车的系统、方法及计算机可读存储介质,包括导航系统单元、车载信息娱乐终端、网关和自动泊车系统单元;所述车载信息娱乐终端通过网关和自动泊车系统单元进行数据交互;响应于所述车载信息娱乐终端接收到所述导航系统单元发出的已达到停车目的地时,所述车载信息娱乐终端向自动泊车系统单元发出激活信号;响应于所述自动泊车系统单元接收到该激活信号时,激活自动泊车系统单元,并向车载信息娱乐终端发出泊车打开信号;响应于所述车载信息娱乐终端接收到所述泊车打开信号时,进入自动泊车功能界面。本发明通过与车载导航定
自动泊车方法、系统、设备及计算机可读存储介质.pdf
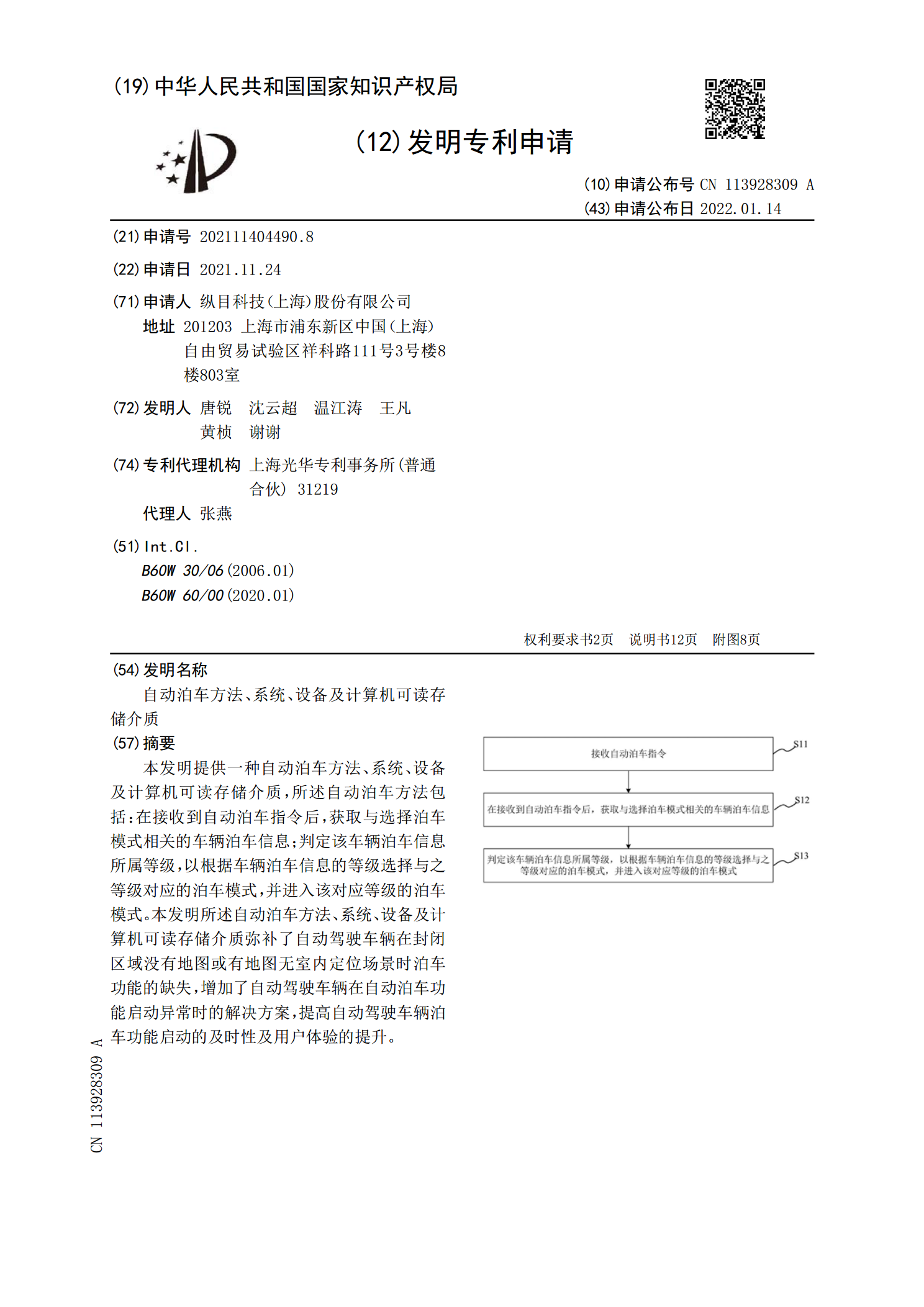
本发明提供一种自动泊车方法、系统、设备及计算机可读存储介质,所述自动泊车方法包括:在接收到自动泊车指令后,获取与选择泊车模式相关的车辆泊车信息;判定该车辆泊车信息所属等级,以根据车辆泊车信息的等级选择与之等级对应的泊车模式,并进入该对应等级的泊车模式。本发明所述自动泊车方法、系统、设备及计算机可读存储介质弥补了自动驾驶车辆在封闭区域没有地图或有地图无室内定位场景时泊车功能的缺失,增加了自动驾驶车辆在自动泊车功能启动异常时的解决方案,提高自动驾驶车辆泊车功能启动的及时性及用户体验的提升。
自动泊车系统、自动泊车方法以及存储介质.pdf
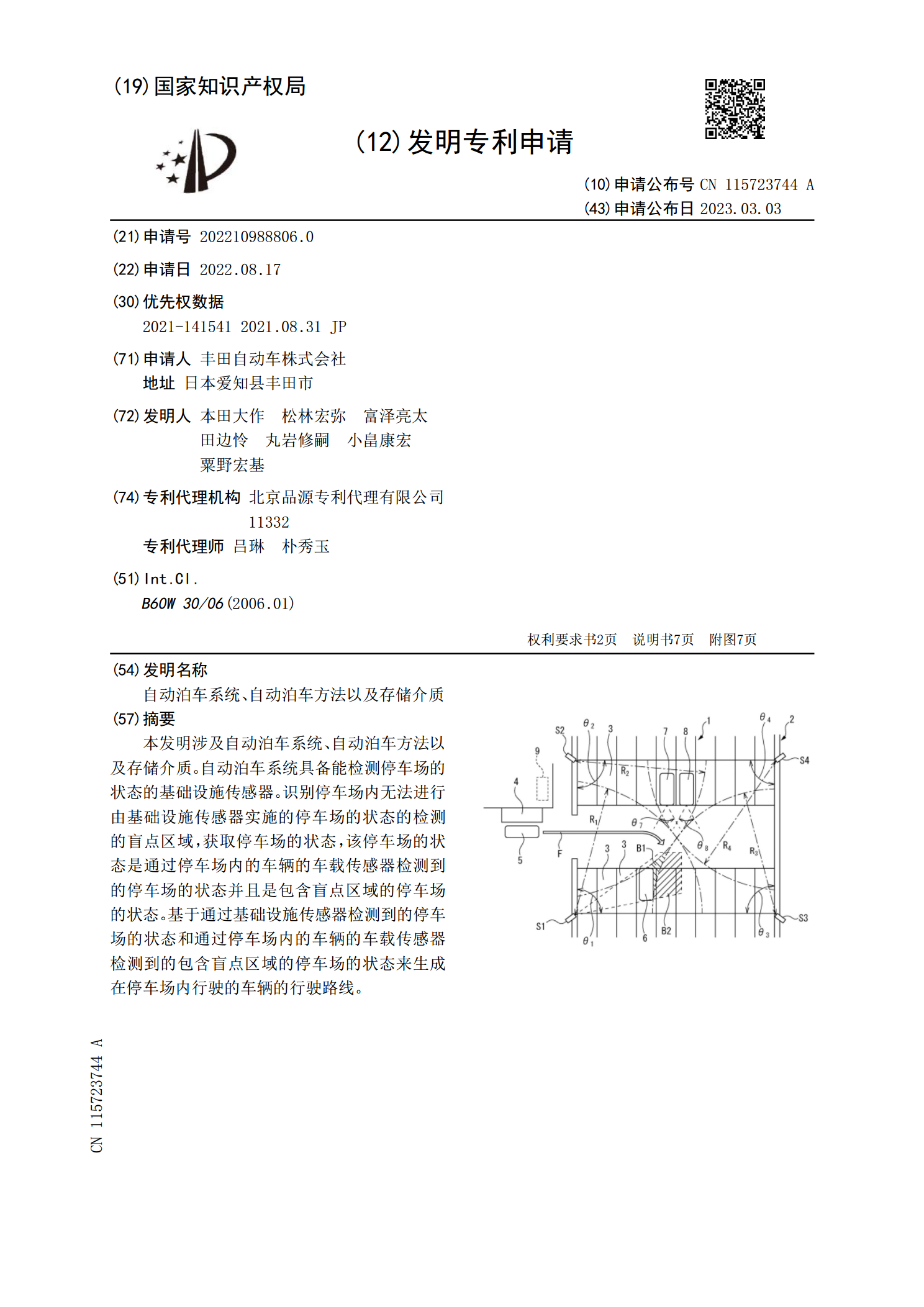
本发明涉及自动泊车系统、自动泊车方法以及存储介质。自动泊车系统具备能检测停车场的状态的基础设施传感器。识别停车场内无法进行由基础设施传感器实施的停车场的状态的检测的盲点区域,获取停车场的状态,该停车场的状态是通过停车场内的车辆的车载传感器检测到的停车场的状态并且是包含盲点区域的停车场的状态。基于通过基础设施传感器检测到的停车场的状态和通过停车场内的车辆的车载传感器检测到的包含盲点区域的停车场的状态来生成在停车场内行驶的车辆的行驶路线。