
一种叉车托盘的定位方法、装置、存储介质及电子设备.pdf

小沛****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种叉车托盘的定位方法、装置、存储介质及电子设备.pdf
本发明公开了一种叉车托盘定位的方法、装置、存储介质和电子设备,该方法包括:获取基于RGB‑D传感器获取的深度图像;获取照相机采集的平面图像;利用平面图像识别叉车托盘,并确定出叉车托盘在所述深度图像中所在的区域;对叉车托盘在深度图像中所在的区域进行平面分割处理,确定出包含所述叉车托盘的平面集;将平面图像与预先制备的托盘模板进行匹配,得到匹配的目标托盘模板;利用确定出的所述包含叉车托盘的平面集与目标托盘模板进行匹配,标记目标托盘模板在第二目标区域中的位置;将目标托盘模板在第二目标区域中的位置转换为三维空间中的

一种定位方法、定位装置、电子设备及存储介质.pdf
本发明提供一种定位方法、定位装置、电子设备及存储介质,涉及定位技术领域,所述方法包括:接收所述多个第一监测设备发送的第一监测数据,以及所述多个第二监测设备发送的第二监测数据;基于所述第一监测数据,生成第一对象的第一运动轨迹,以及基于所述第二监测数据,生成第二对象的第二运动轨迹,所述第二对象为所述第一对象携带的与所述第二监测设备通信的无线设备;基于所述第一运动轨迹与所述第二运动轨迹之间的相似度,生成所述第一对象的第三运动轨迹,所述第三运动轨迹用于所述第一对象的定位。通过第二运动轨迹可以弥补第一对象在第一监测
定位方法、装置、存储介质及电子设备.pdf
本申请公开了一种定位方法、装置、存储介质和电子设备,涉及定位技术领域,主要目的在于解决相关技术中UWB定位装置需要搭建有线电源网络给现场UWB基站供电、需要搭建有线数据网络和位于远端的解算服务器进行数据交换使得搭建工作较为繁琐的问题。其中,定位方法包括:解算服务器通过无线网络与UWB基站进行通信连接;其中,解算服务器和UWB基站均为可充电设备,解算服务器被配置为能够提供所述无线网络。上述方法。能够省去电源线、有线网络、有线电源网络连接线的设置,简化定位装置的搭建操作,大大降低了人力、物力和工时,有利于节约
定位方法、装置、电子设备及存储介质.pdf
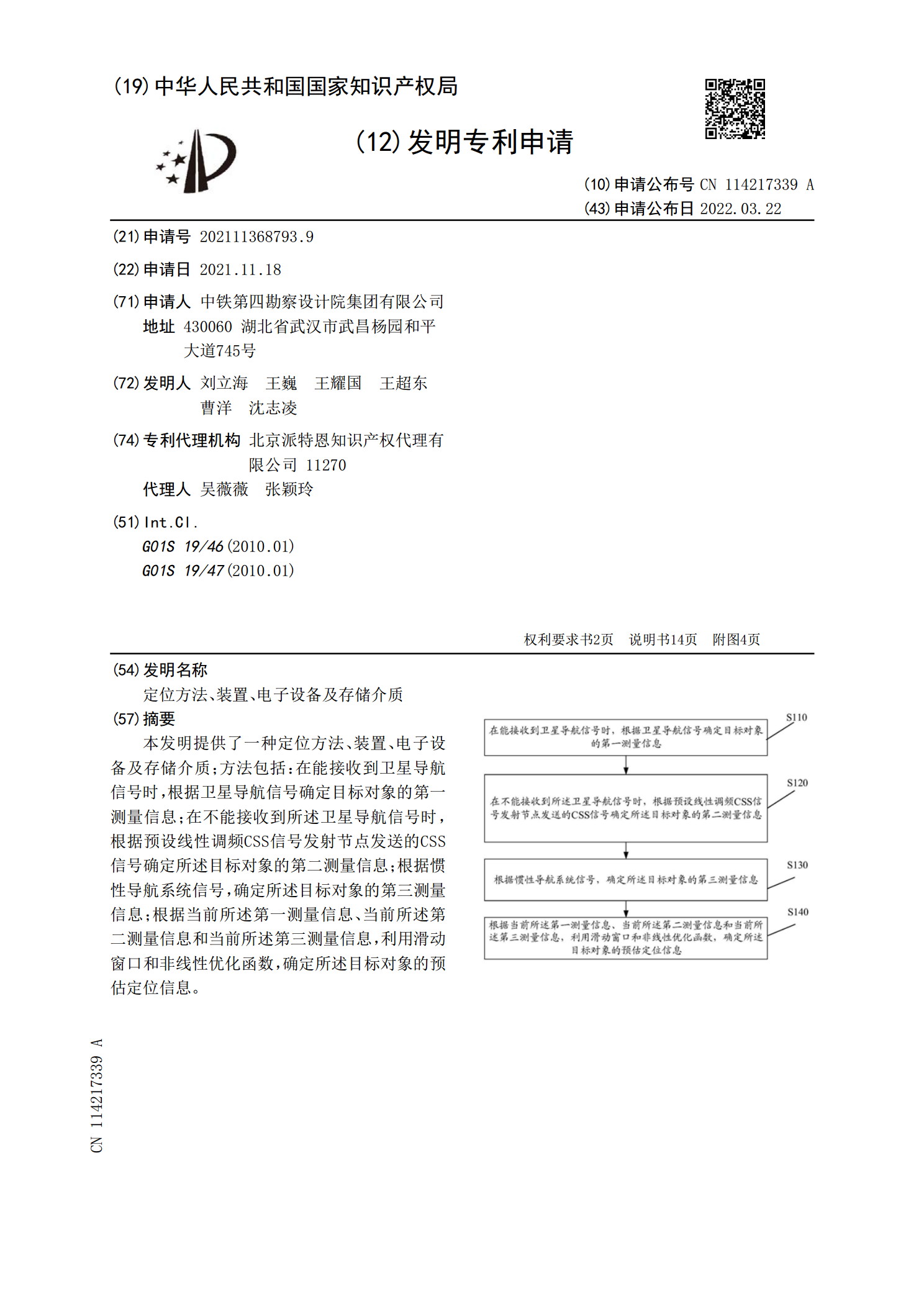
本发明提供了一种定位方法、装置、电子设备及存储介质;方法包括:在能接收到卫星导航信号时,根据卫星导航信号确定目标对象的第一测量信息;在不能接收到所述卫星导航信号时,根据预设线性调频CSS信号发射节点发送的CSS信号确定所述目标对象的第二测量信息;根据惯性导航系统信号,确定所述目标对象的第三测量信息;根据当前所述第一测量信息、当前所述第二测量信息和当前所述第三测量信息,利用滑动窗口和非线性优化函数,确定所述目标对象的预估定位信息。
定位方法、装置、电子设备及存储介质.pdf
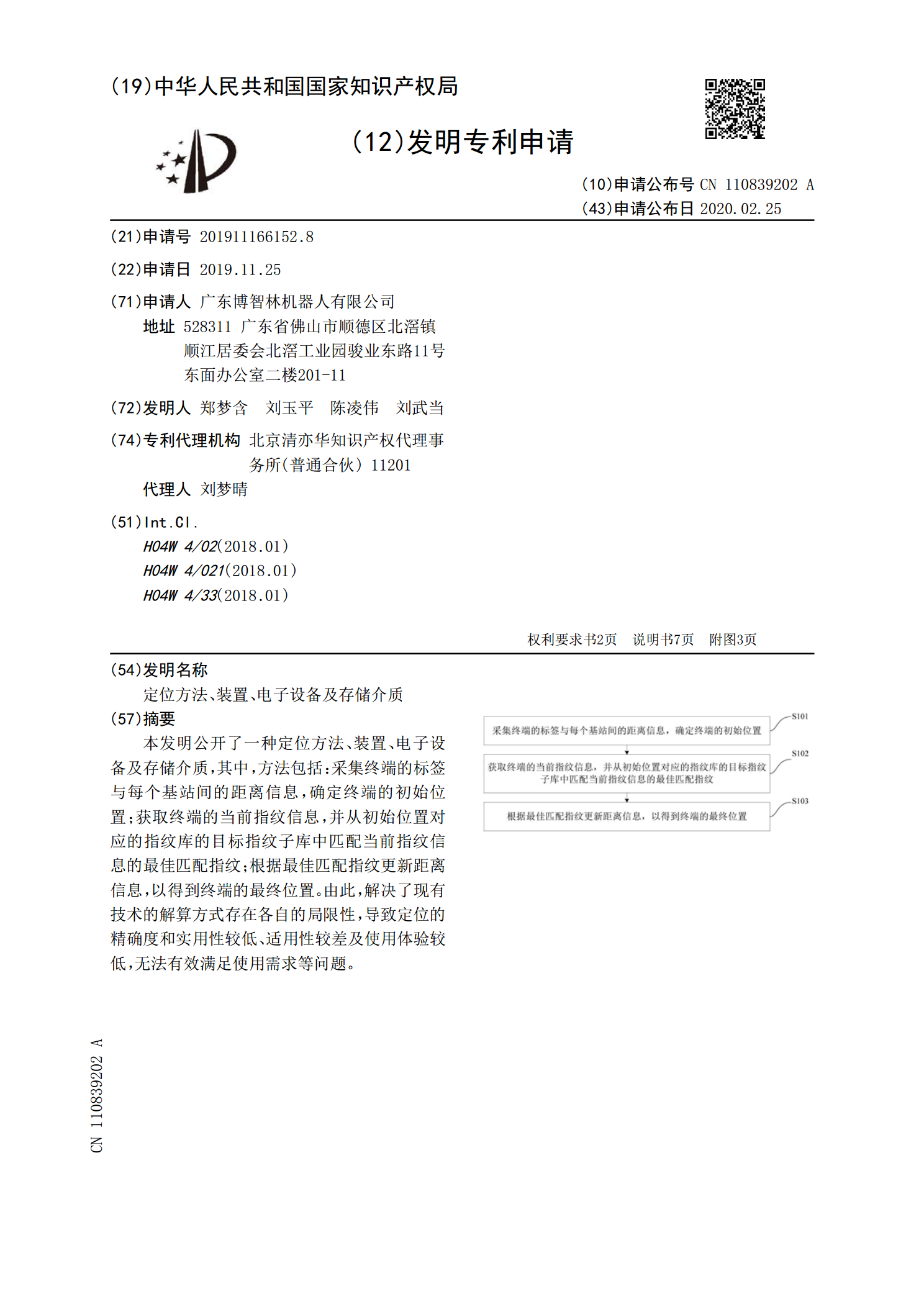
本发明公开了一种定位方法、装置、电子设备及存储介质,其中,方法包括:采集终端的标签与每个基站间的距离信息,确定终端的初始位置;获取终端的当前指纹信息,并从初始位置对应的指纹库的目标指纹子库中匹配当前指纹信息的最佳匹配指纹;根据最佳匹配指纹更新距离信息,以得到终端的最终位置。由此,解决了现有技术的解算方式存在各自的局限性,导致定位的精确度和实用性较低、适用性较差及使用体验较低,无法有效满足使用需求等问题。