
MicroLED巨量转移芯片定位及飞行观测的系统及观测方法.pdf

安双****文章

1/10

2/10
3/10
4/10

5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
MicroLED巨量转移芯片定位及飞行观测的系统及观测方法.pdf
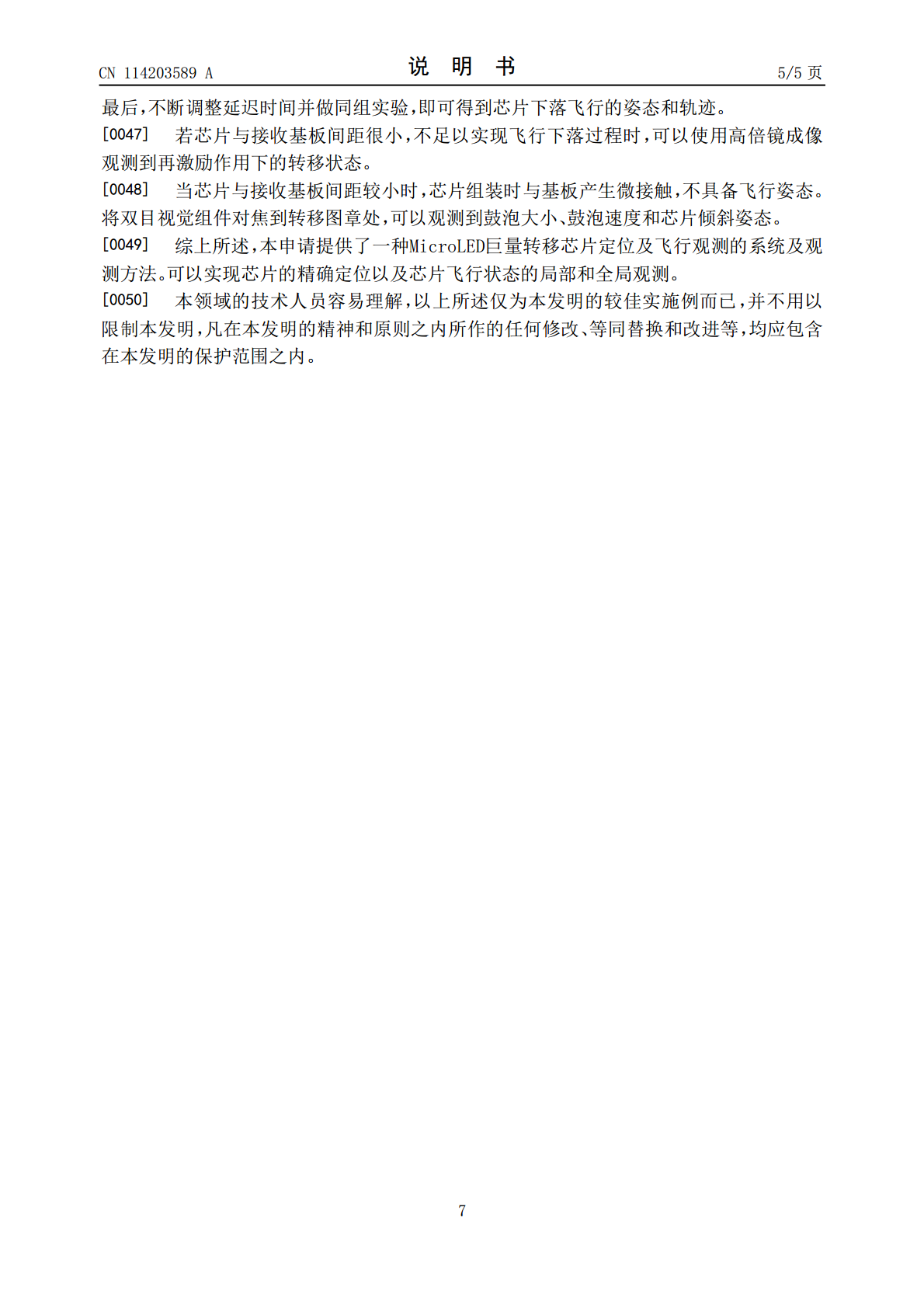
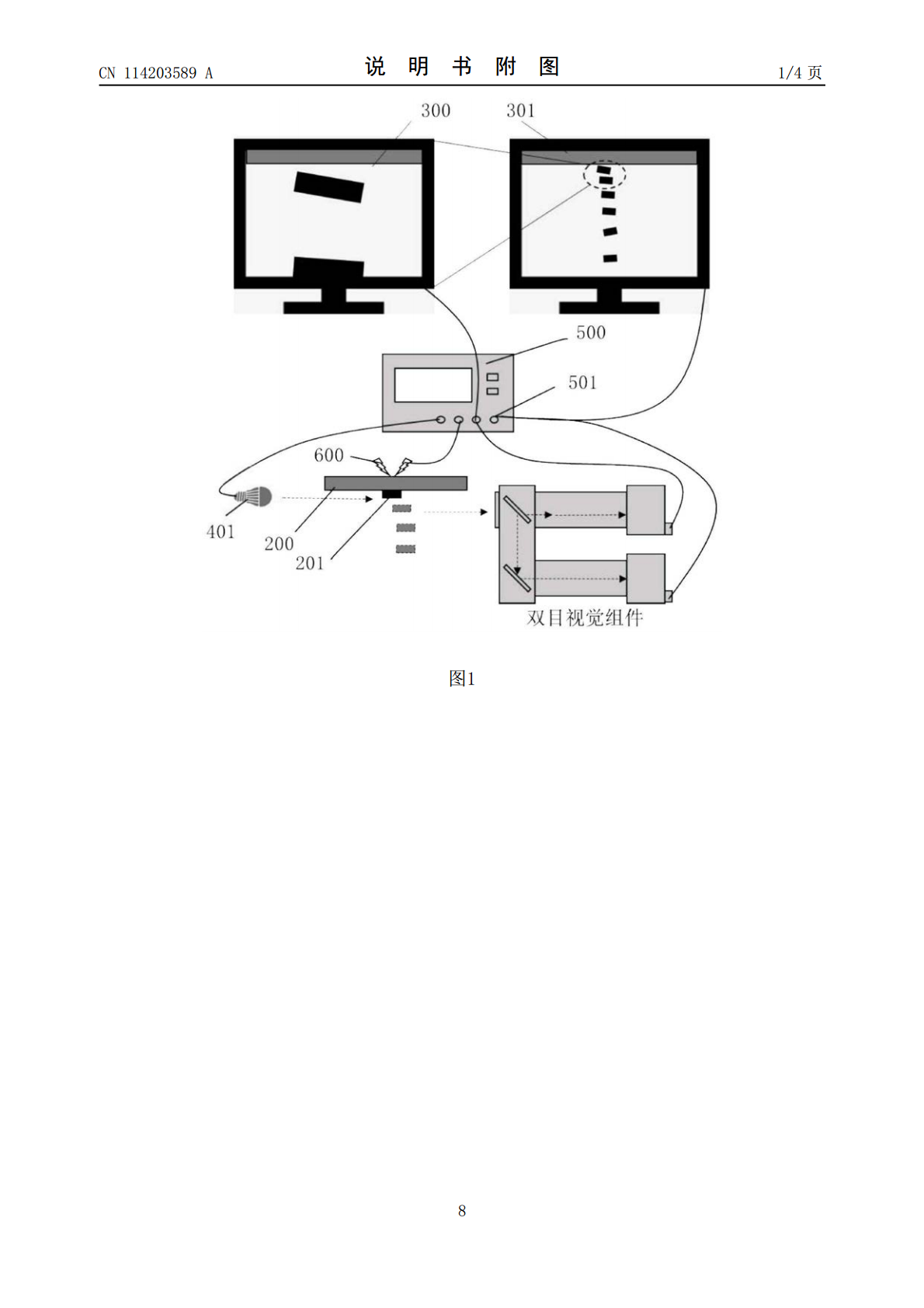
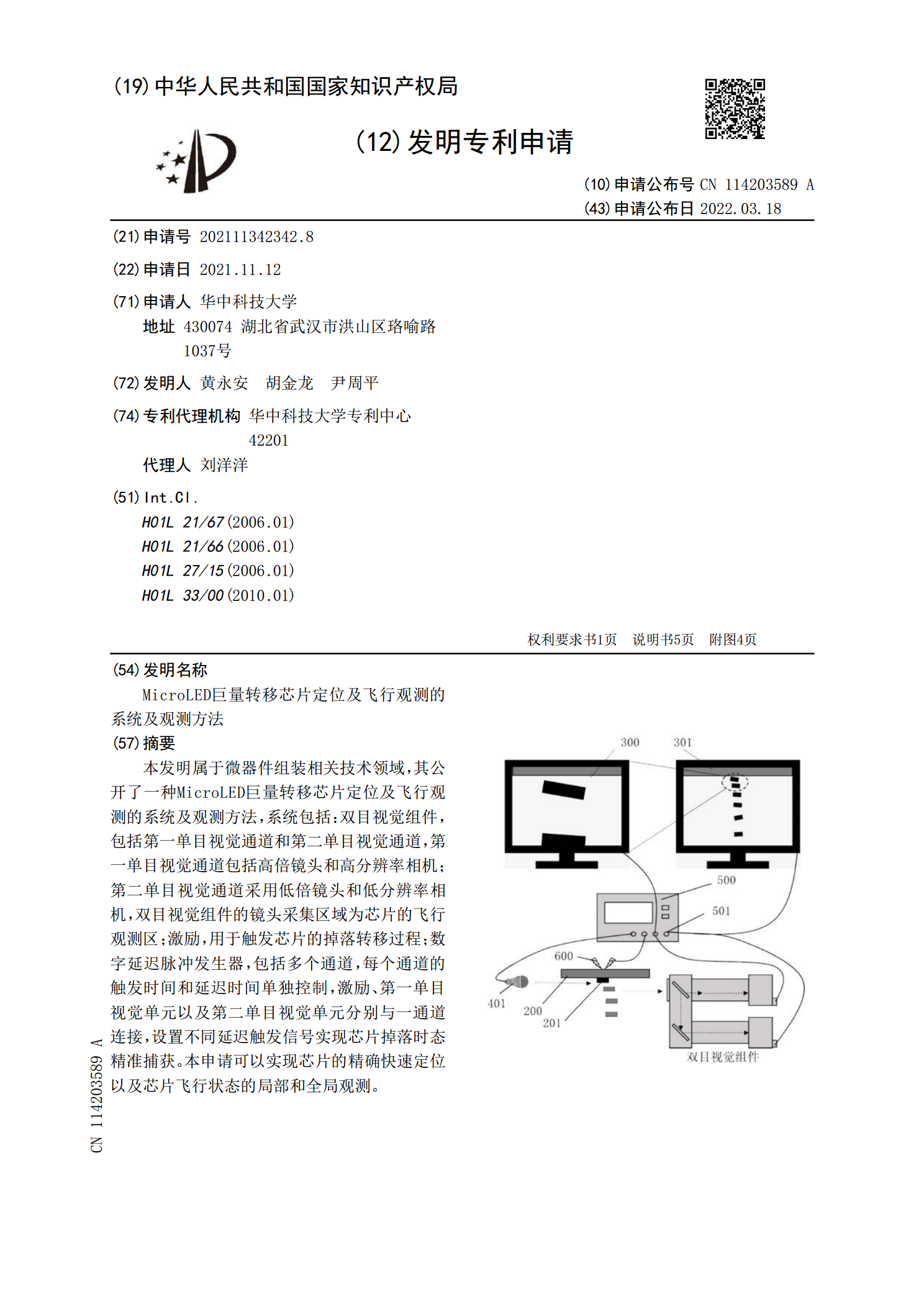
本发明属于微器件组装相关技术领域,其公开了一种MicroLED巨量转移芯片定位及飞行观测的系统及观测方法,系统包括:双目视觉组件,包括第一单目视觉通道和第二单目视觉通道,第一单目视觉通道包括高倍镜头和高分辨率相机;第二单目视觉通道采用低倍镜头和低分辨率相机,双目视觉组件的镜头采集区域为芯片的飞行观测区;激励,用于触发芯片的掉落转移过程;数字延迟脉冲发生器,包括多个通道,每个通道的触发时间和延迟时间单独控制,激励、第一单目视觉单元以及第二单目视觉单元分别与一通道连接,设置不同延迟触发信号实现芯片掉落时态精准

Micro-LED芯片的巨量转移方法和巨量转移载体.pdf
本申请实施例提供一种Micro‑LED芯片的巨量转移方法和巨量转移载体,巨量转移方法包括:制备具有网孔的金属膜层;涂布第一胶材至金属膜层,并使至少部分第一胶材填充于金属膜层的网孔;在金属膜层的一侧涂布第二胶材,第二胶材与网孔内的第一胶材连接,以得到转移载体;将晶圆上的Micro‑LED芯片转移至转移载体,并使Micro‑LED芯片对应网孔内的第一胶材设置;将转移载体上的Micro‑LED芯片转移至目标基板。本申请实施例可以增加转移载体的刚度,使得转移载体不容易因为自身应力而弯曲,进而可以避免现有的过渡膜层
激光辅助MicroLED巨量转移系统的三维运动台.pdf
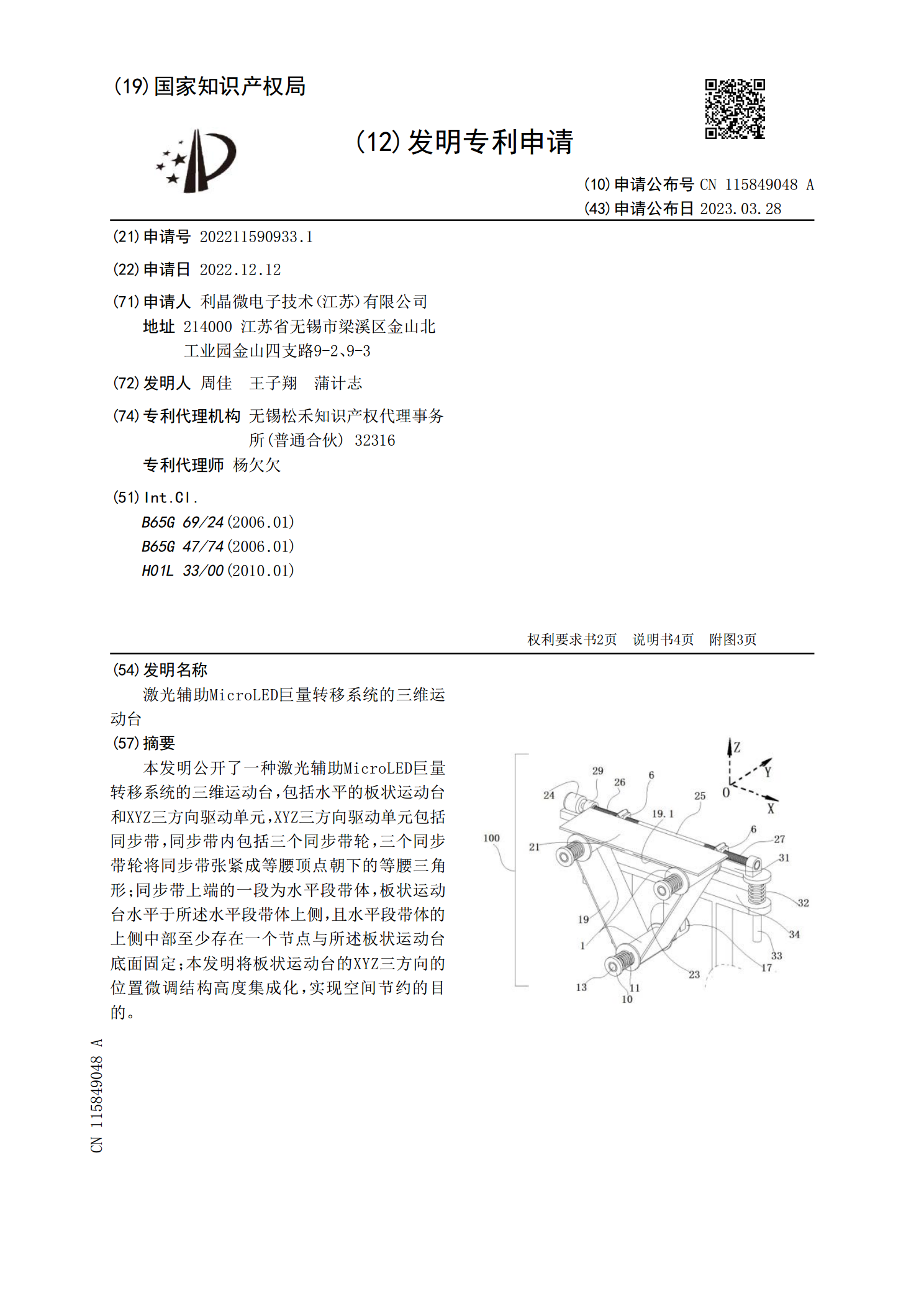
本发明公开了一种激光辅助MicroLED巨量转移系统的三维运动台,包括水平的板状运动台和XYZ三方向驱动单元,XYZ三方向驱动单元包括同步带,同步带内包括三个同步带轮,三个同步带轮将同步带张紧成等腰顶点朝下的等腰三角形;同步带上端的一段为水平段带体,板状运动台水平于所述水平段带体上侧,且水平段带体的上侧中部至少存在一个节点与所述板状运动台底面固定;本发明将板状运动台的XYZ三方向的位置微调结构高度集成化,实现空间节约的目的。
一种LED芯片巨量转移方法.pdf
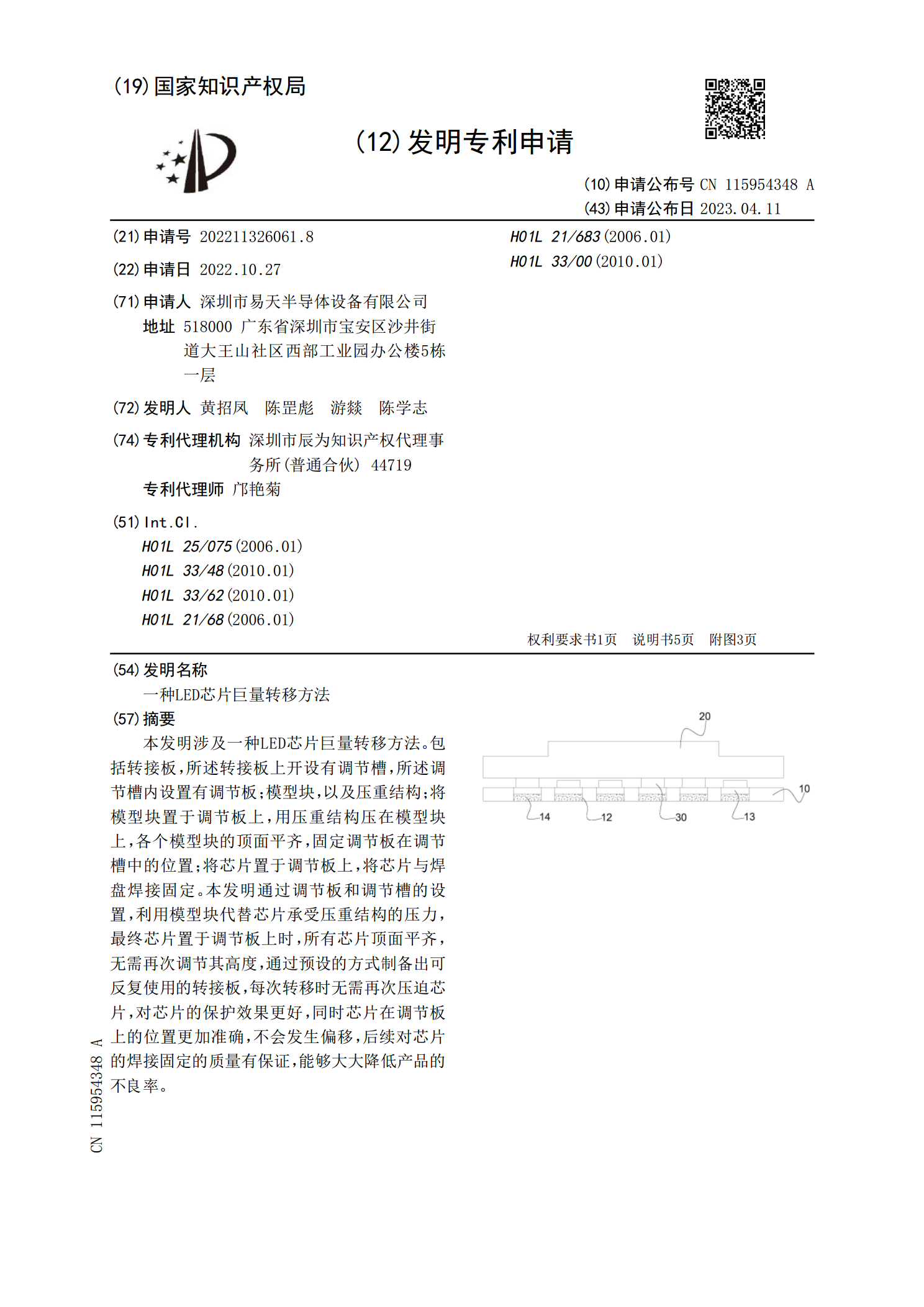
本发明涉及一种LED芯片巨量转移方法。包括转接板,所述转接板上开设有调节槽,所述调节槽内设置有调节板;模型块,以及压重结构;将模型块置于调节板上,用压重结构压在模型块上,各个模型块的顶面平齐,固定调节板在调节槽中的位置;将芯片置于调节板上,将芯片与焊盘焊接固定。本发明通过调节板和调节槽的设置,利用模型块代替芯片承受压重结构的压力,最终芯片置于调节板上时,所有芯片顶面平齐,无需再次调节其高度,通过预设的方式制备出可反复使用的转接板,每次转移时无需再次压迫芯片,对芯片的保护效果更好,同时芯片在调节板上的位置更

一种低温芯片工作状态的观测装置及观测方法.pdf
本发明涉及低温测试技术领域,具体地说,是一种低温芯片工作状态的观测装置及观测方法,用于低温芯片工作状态及工作环境的测量,观测装置包括密封窗片、透镜、远红外探测阵列、外壳、平移台和计算机;透镜对被测低温芯片的不同区域进行成像,观测时,透镜和远红外探测阵列安装于外壳上,并通过平移台实现整个观测装置的位置移动,使得在某一位置上,被测低温芯片中某一区域的辐射透过密封窗片后成像于远红外探测阵列上,通过计算机上的控制软件分别记录低温芯片不同区域的远红外图像以及这些图像随时间的变化,从而实现对低温芯片工作状态的观测和分