
一种车载环视相机快速自动标定方法和装置.pdf

努力****星驰


1/10
2/10
3/10
4/10

5/10
6/10

7/10
8/10
9/10
10/10
亲,该文档总共29页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种车载环视相机快速自动标定方法和装置.pdf
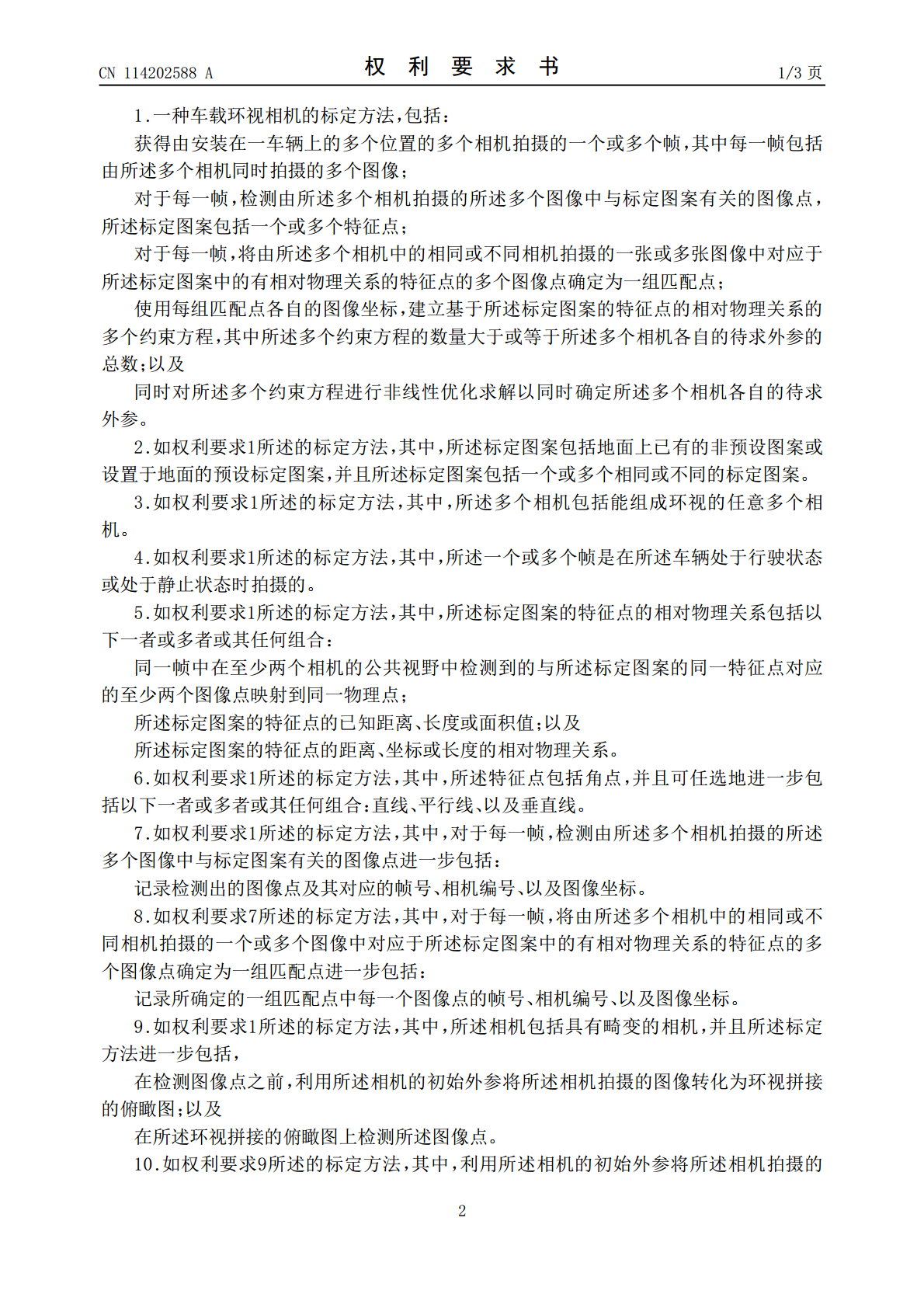
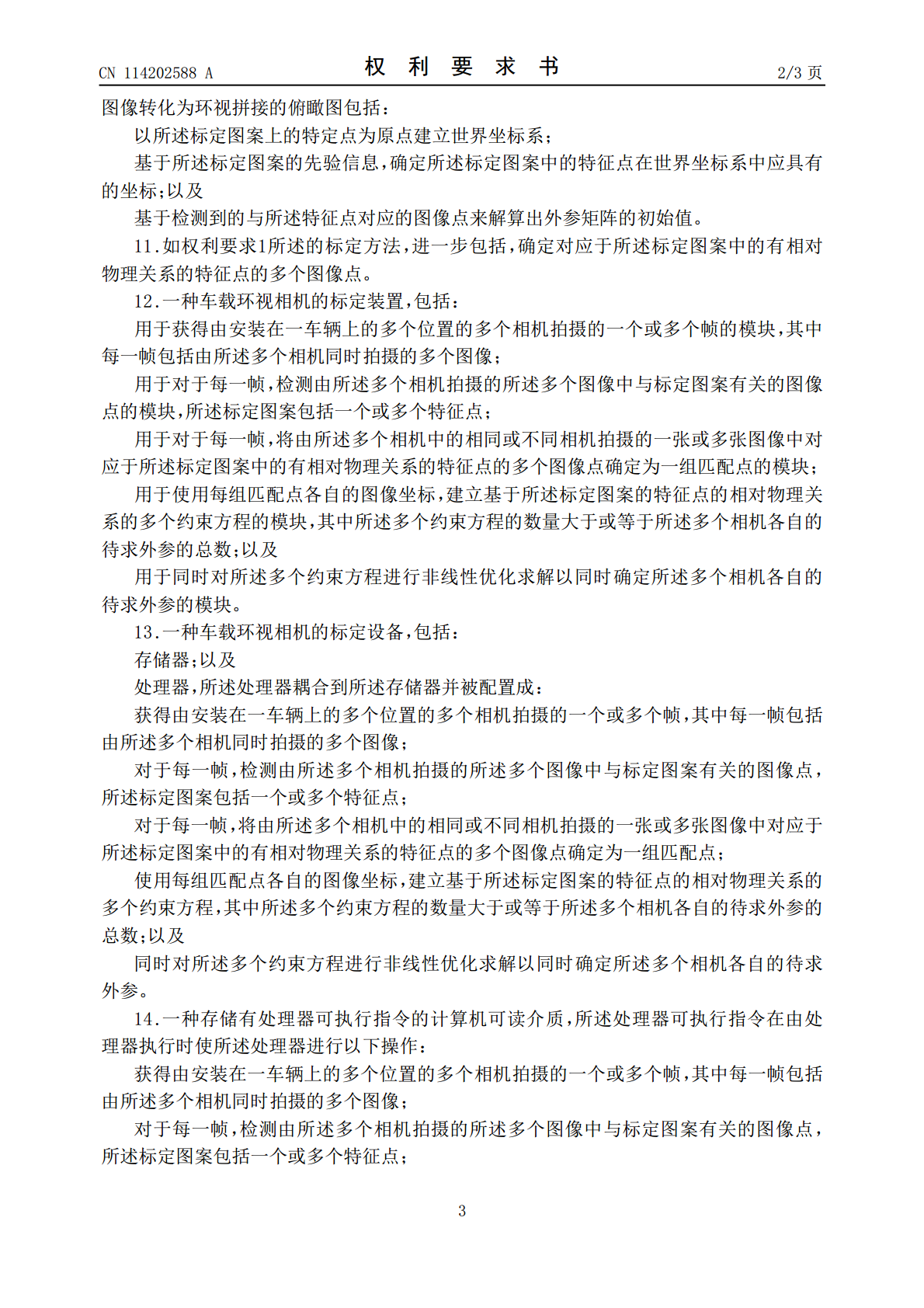
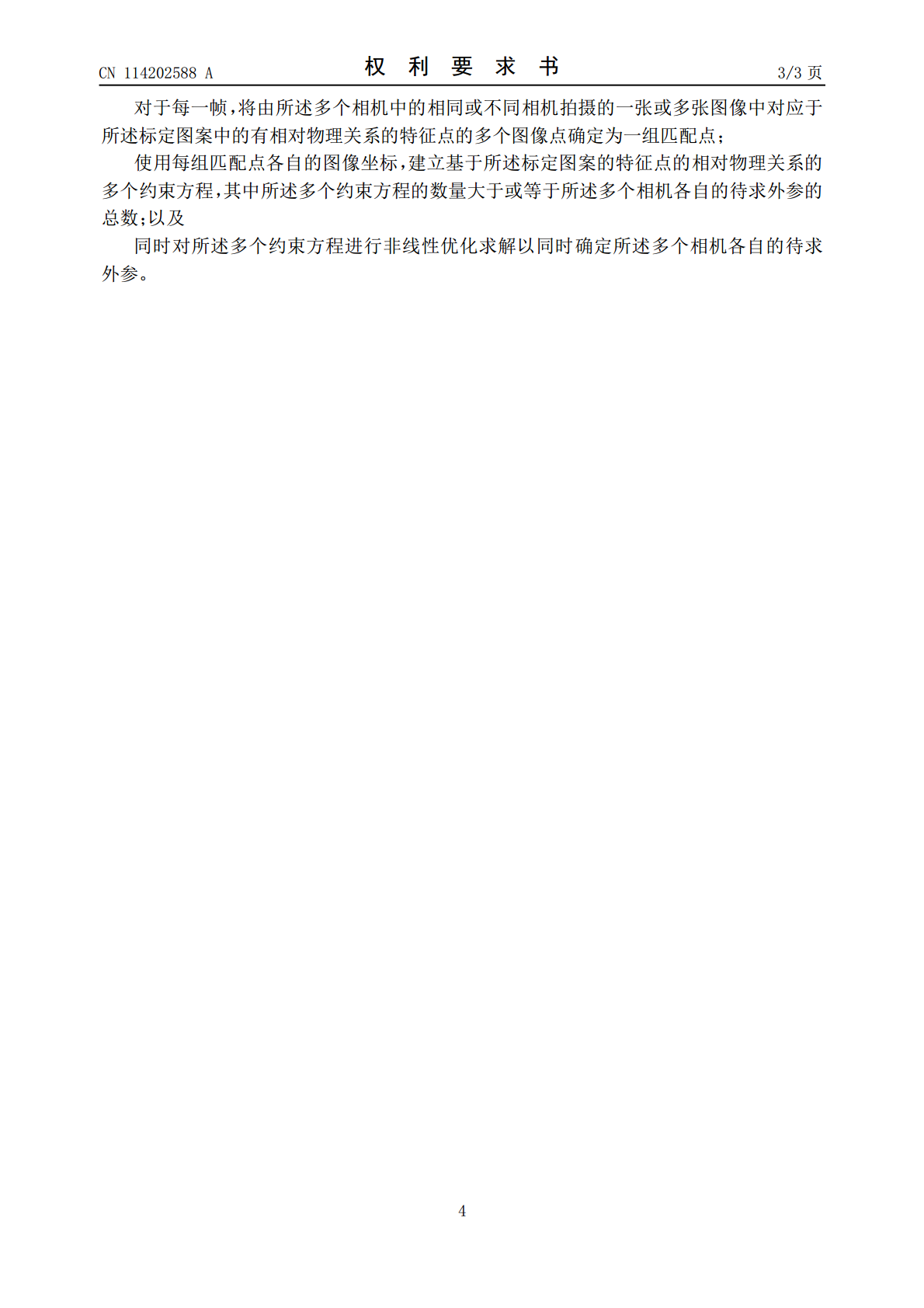
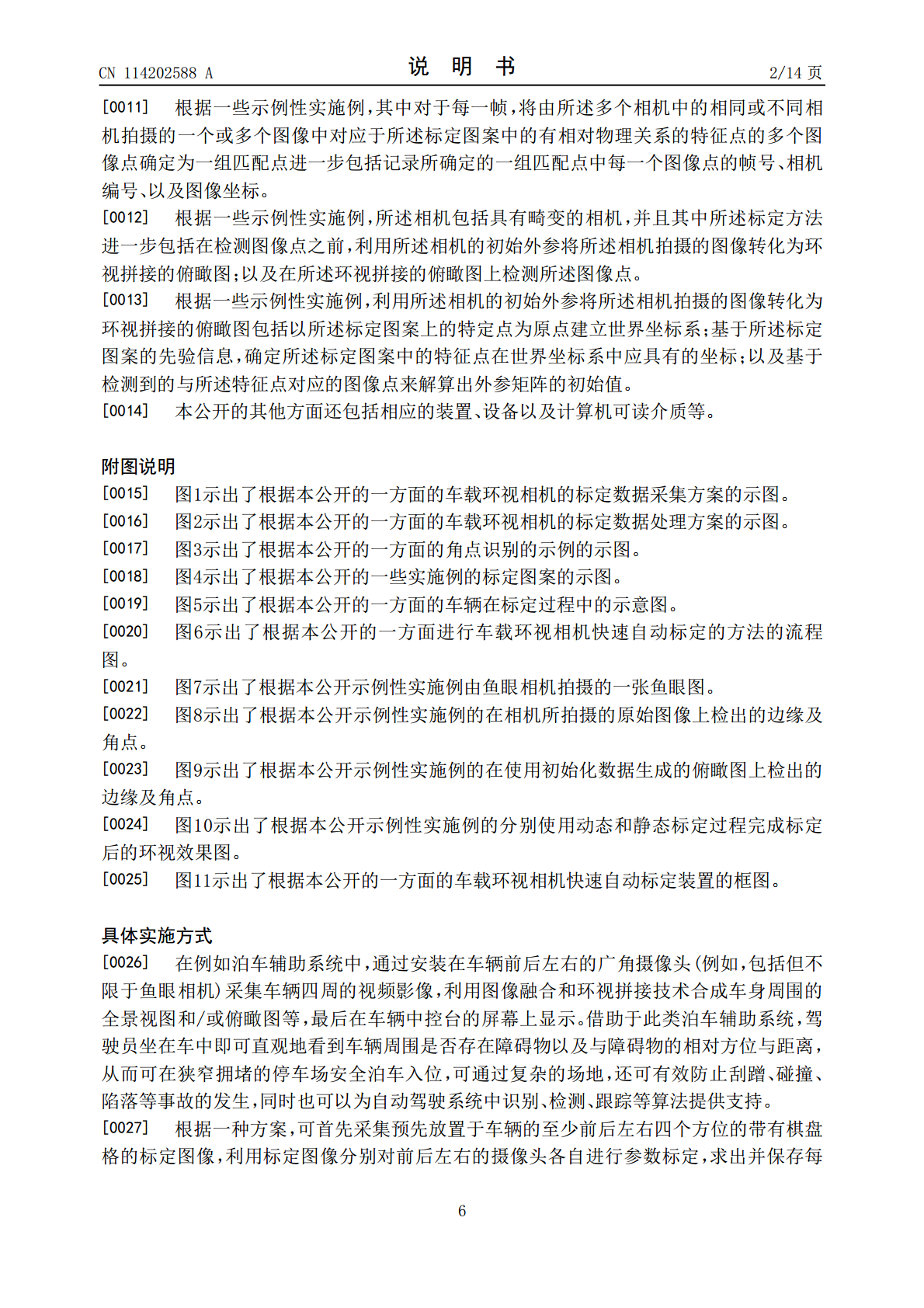
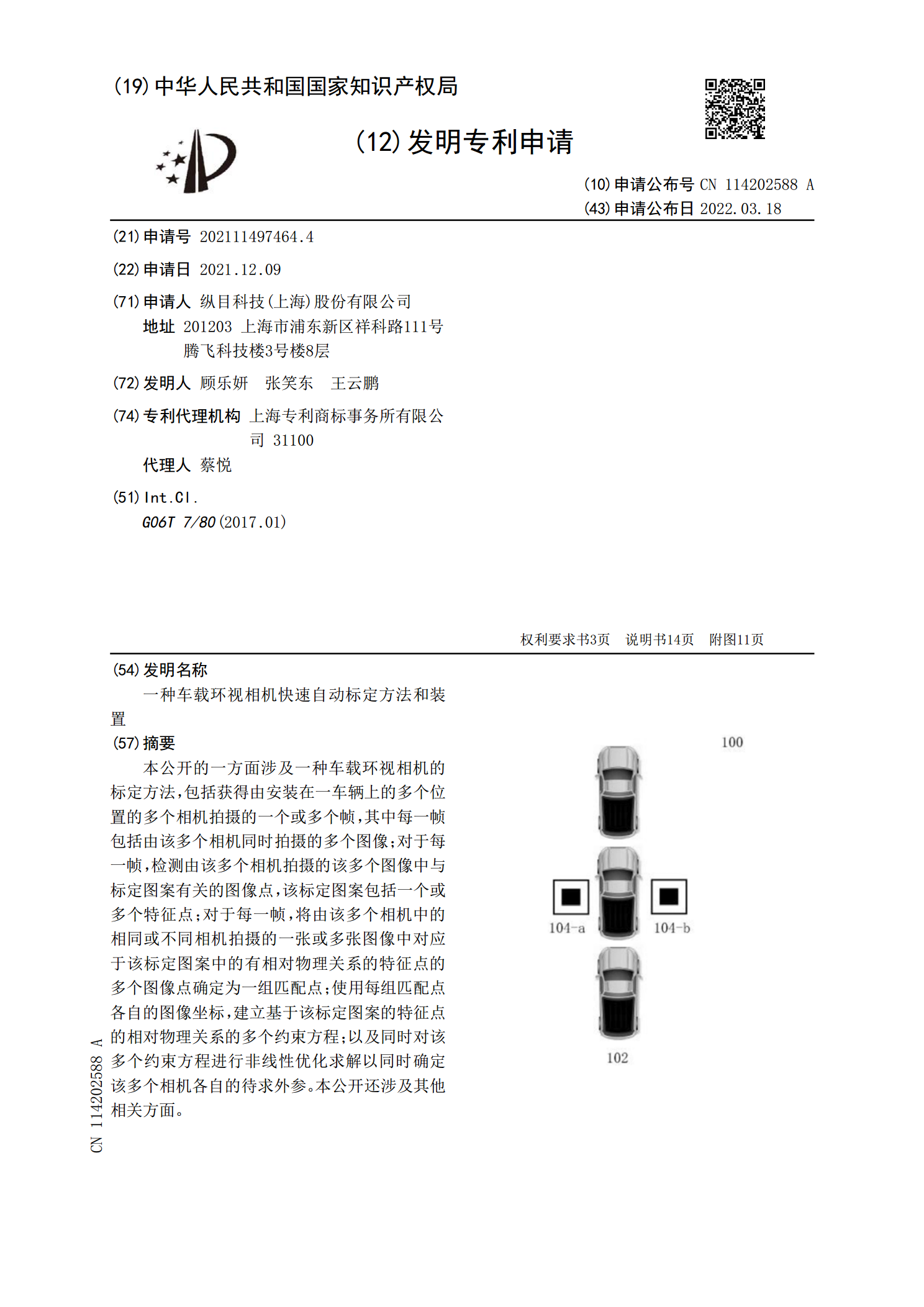
本公开的一方面涉及一种车载环视相机的标定方法,包括获得由安装在一车辆上的多个位置的多个相机拍摄的一个或多个帧,其中每一帧包括由该多个相机同时拍摄的多个图像;对于每一帧,检测由该多个相机拍摄的该多个图像中与标定图案有关的图像点,该标定图案包括一个或多个特征点;对于每一帧,将由该多个相机中的相同或不同相机拍摄的一张或多张图像中对应于该标定图案中的有相对物理关系的特征点的多个图像点确定为一组匹配点;使用每组匹配点各自的图像坐标,建立基于该标定图案的特征点的相对物理关系的多个约束方程;以及同时对该多个约束方程进行
一种车载环视相机的安装位姿确定方法和装置.pdf
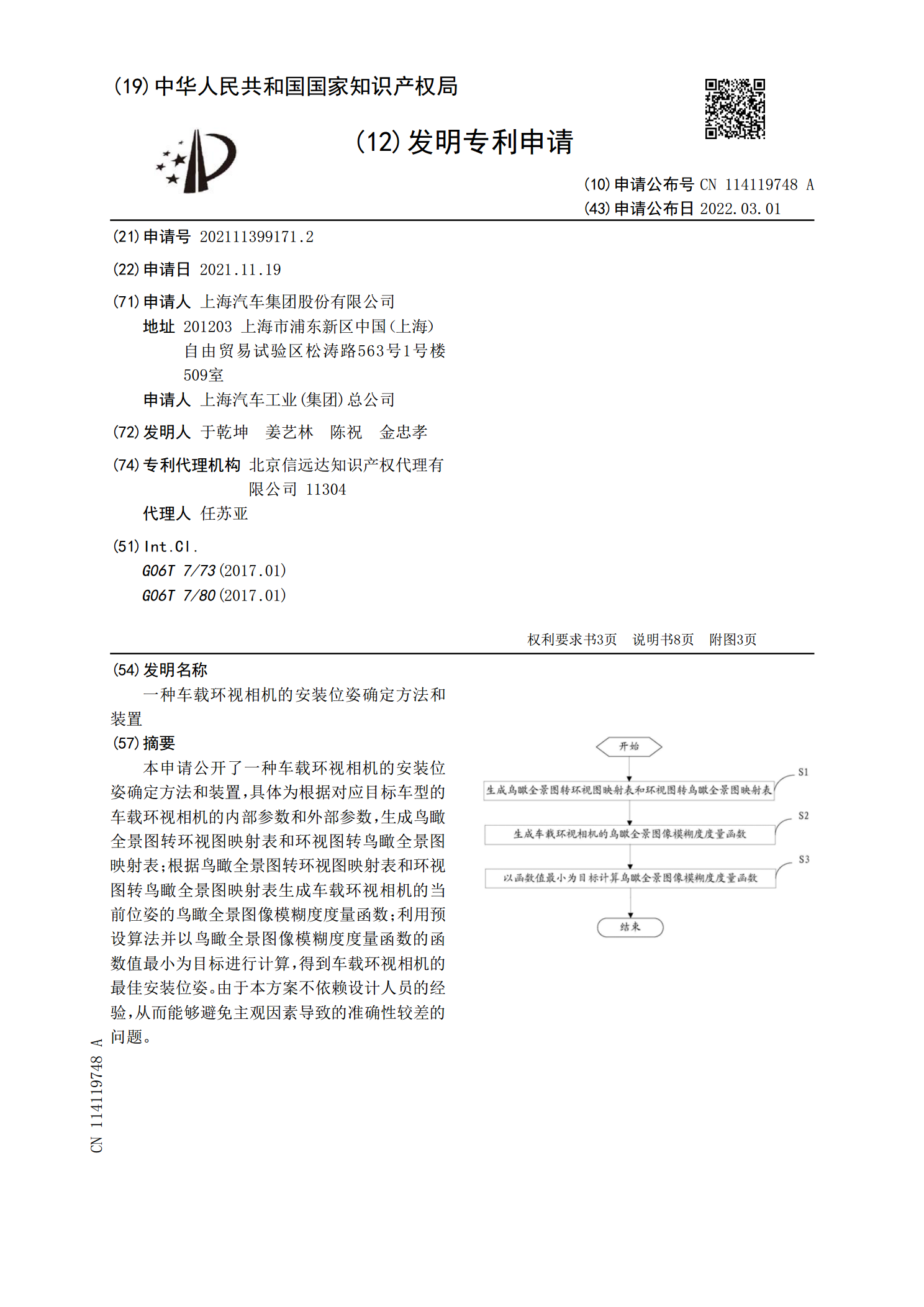
本申请公开了一种车载环视相机的安装位姿确定方法和装置,具体为根据对应目标车型的车载环视相机的内部参数和外部参数,生成鸟瞰全景图转环视图映射表和环视图转鸟瞰全景图映射表;根据鸟瞰全景图转环视图映射表和环视图转鸟瞰全景图映射表生成车载环视相机的当前位姿的鸟瞰全景图像模糊度度量函数;利用预设算法并以鸟瞰全景图像模糊度度量函数的函数值最小为目标进行计算,得到车载环视相机的最佳安装位姿。由于本方案不依赖设计人员的经验,从而能够避免主观因素导致的准确性较差的问题。
车载环视中基于单张图的鱼眼相机内参标定方法.pdf
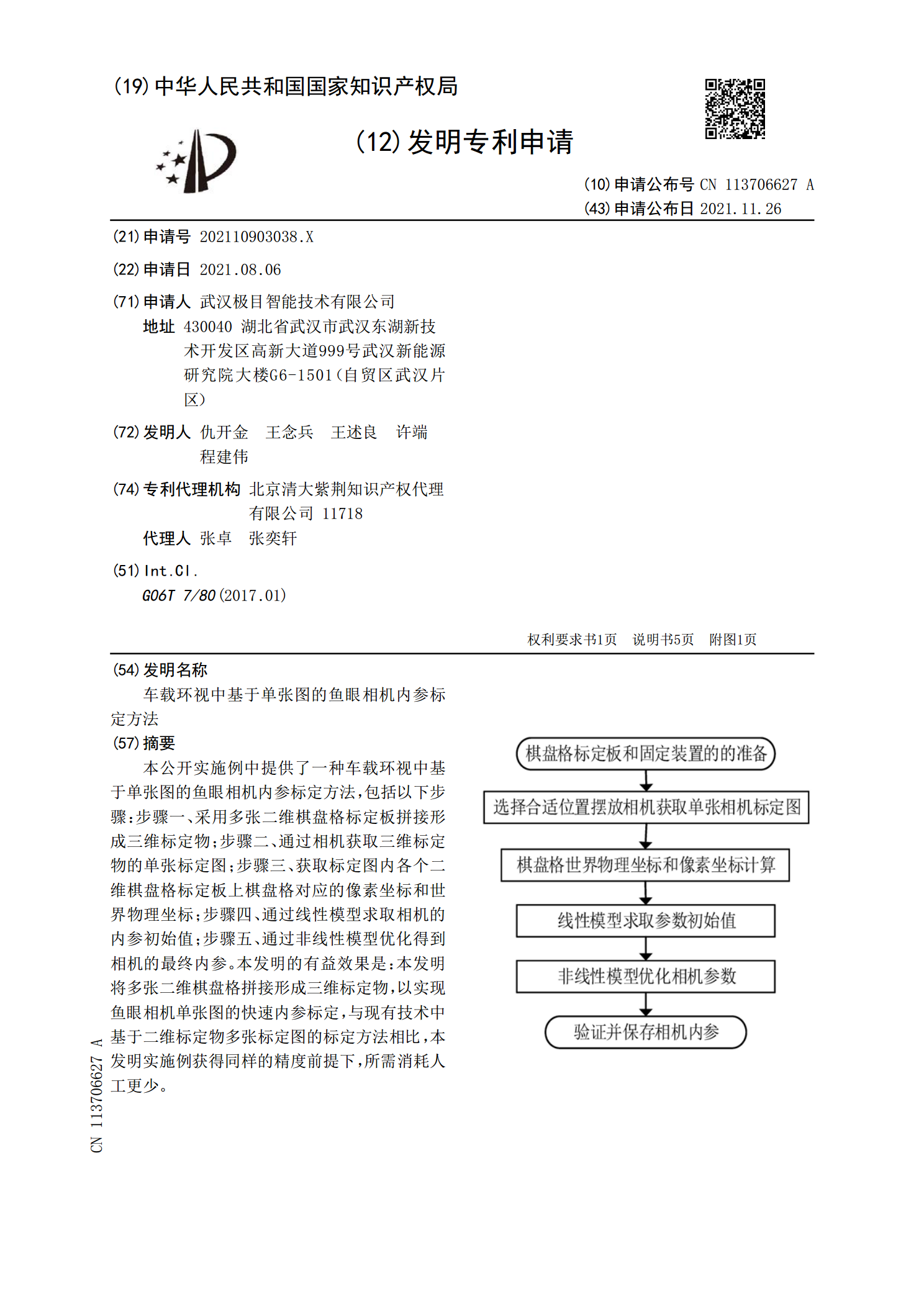
本公开实施例中提供了一种车载环视中基于单张图的鱼眼相机内参标定方法,包括以下步骤:步骤一、采用多张二维棋盘格标定板拼接形成三维标定物;步骤二、通过相机获取三维标定物的单张标定图;步骤三、获取标定图内各个二维棋盘格标定板上棋盘格对应的像素坐标和世界物理坐标;步骤四、通过线性模型求取相机的内参初始值;步骤五、通过非线性模型优化得到相机的最终内参。本发明的有益效果是:本发明将多张二维棋盘格拼接形成三维标定物,以实现鱼眼相机单张图的快速内参标定,与现有技术中基于二维标定物多张标定图的标定方法相比,本发明实施例获得
环视系统自动标定方法、汽车、标定装置及存储介质.pdf
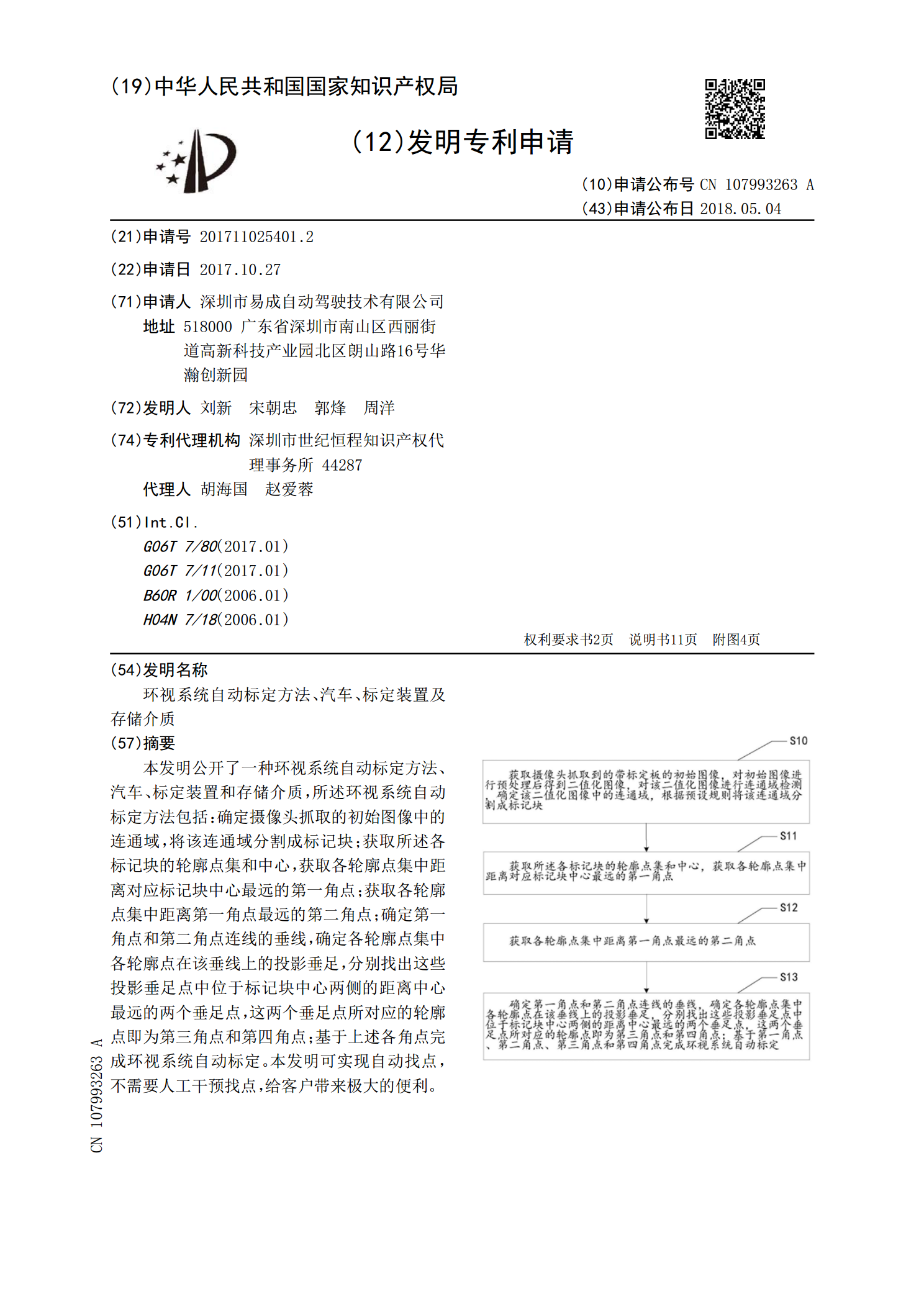
本发明公开了一种环视系统自动标定方法、汽车、标定装置和存储介质,所述环视系统自动标定方法包括:确定摄像头抓取的初始图像中的连通域,将该连通域分割成标记块;获取所述各标记块的轮廓点集和中心,获取各轮廓点集中距离对应标记块中心最远的第一角点;获取各轮廓点集中距离第一角点最远的第二角点;确定第一角点和第二角点连线的垂线,确定各轮廓点集中各轮廓点在该垂线上的投影垂足,分别找出这些投影垂足点中位于标记块中心两侧的距离中心最远的两个垂足点,这两个垂足点所对应的轮廓点即为第三角点和第四角点;基于上述各角点完成环视系统自
一种TOF相机的标定装置和标定方法.pdf
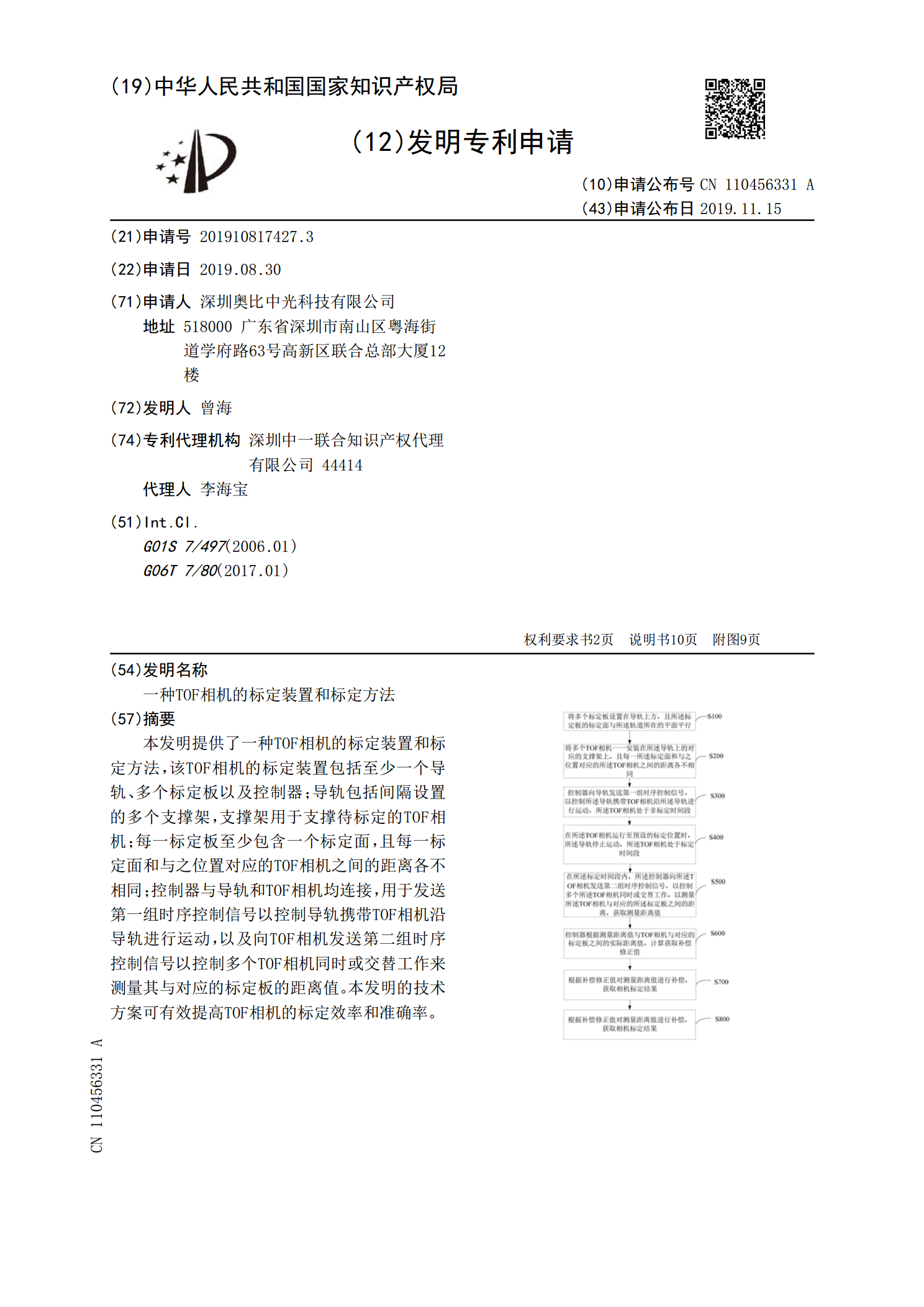
本发明提供了一种TOF相机的标定装置和标定方法,该TOF相机的标定装置包括至少一个导轨、多个标定板以及控制器;导轨包括间隔设置的多个支撑架,支撑架用于支撑待标定的TOF相机;每一标定板至少包含一个标定面,且每一标定面和与之位置对应的TOF相机之间的距离各不相同;控制器与导轨和TOF相机均连接,用于发送第一组时序控制信号以控制导轨携带TOF相机沿导轨进行运动,以及向TOF相机发送第二组时序控制信号以控制多个TOF相机同时或交替工作来测量其与对应的标定板的距离值。本发明的技术方案可有效提高TOF相机的标定效率