
物流分拣线及物流分拣系统.pdf

高格****gu


1/10
2/10
3/10
4/10
5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
物流分拣线及物流分拣系统.pdf
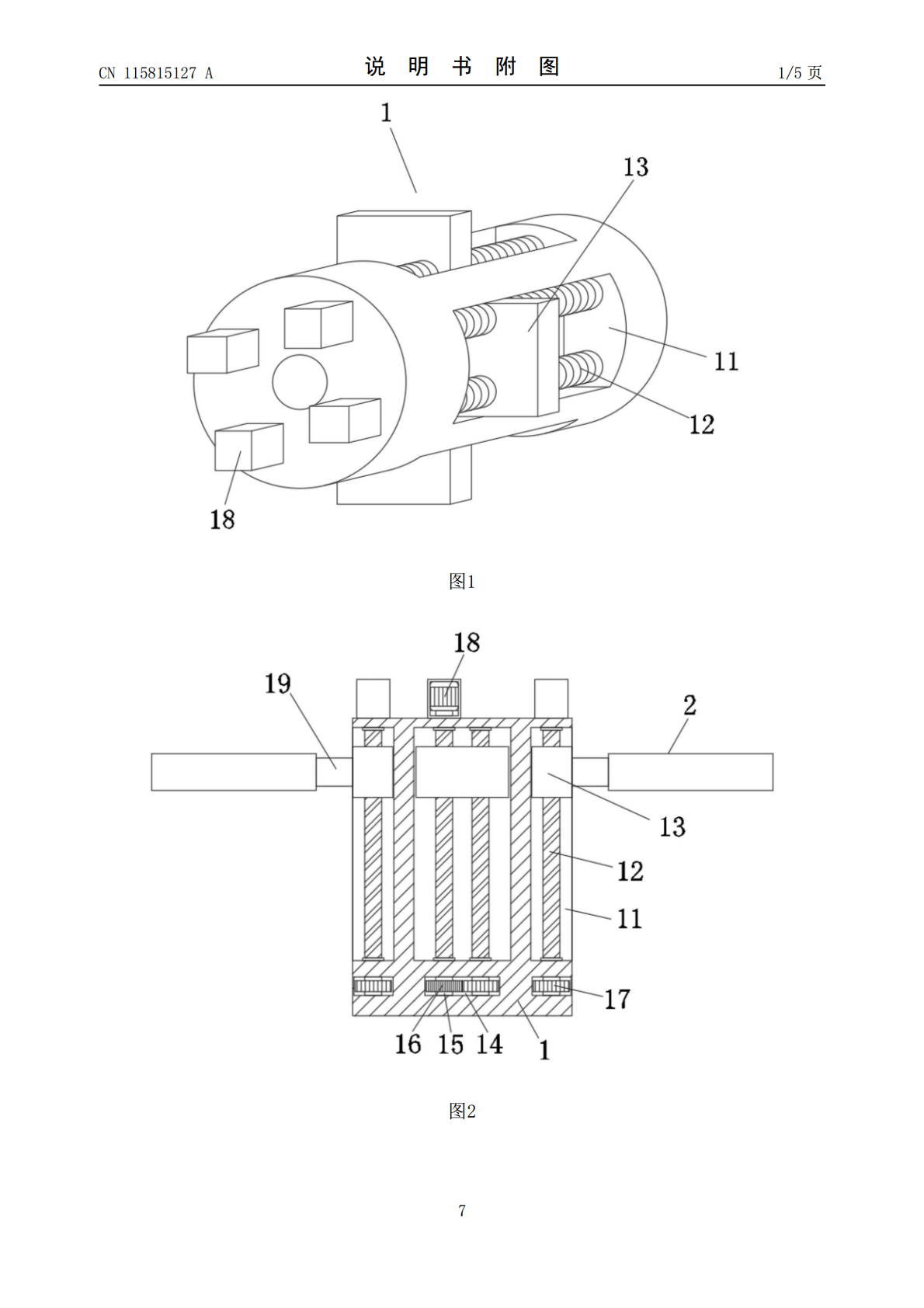
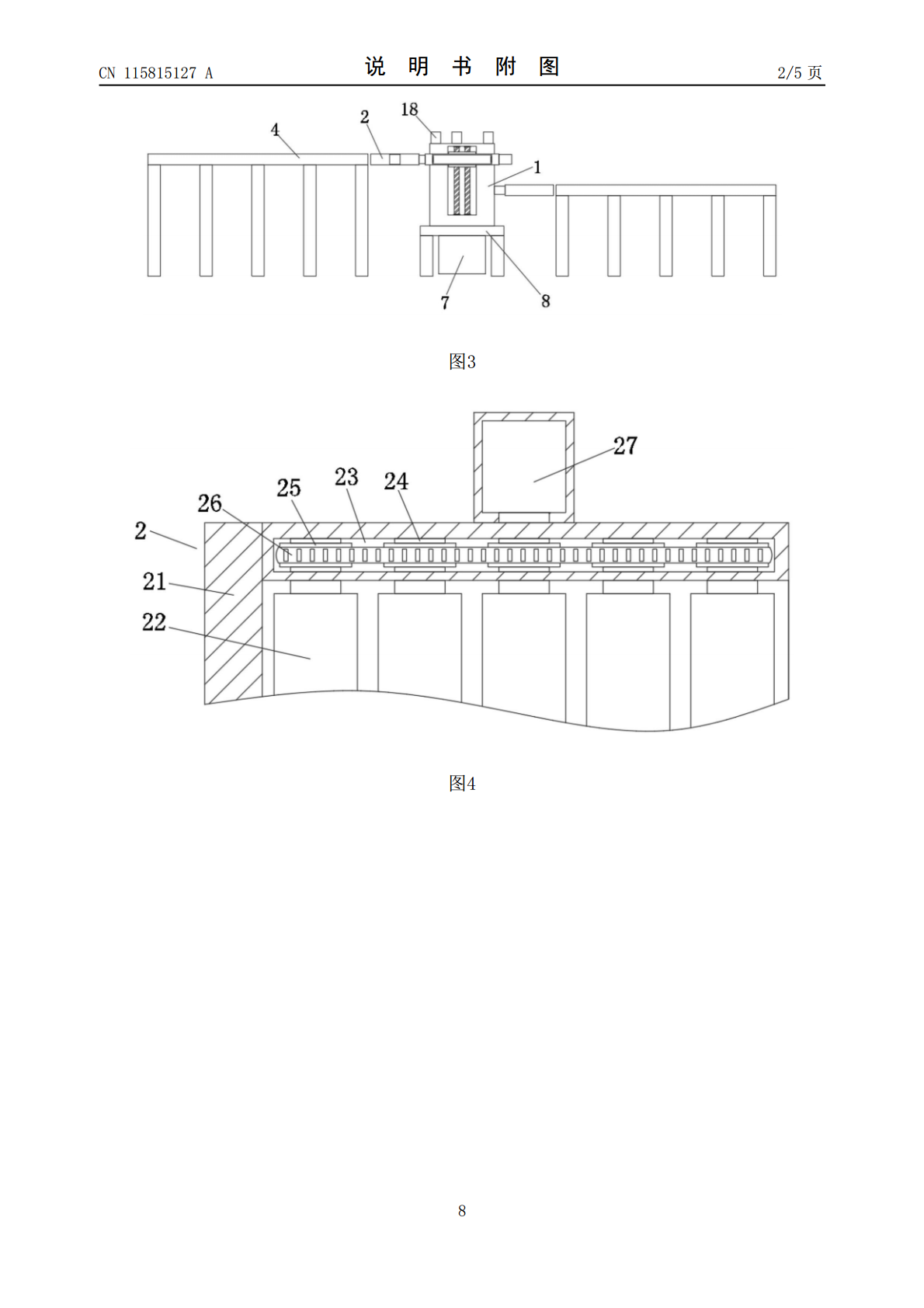
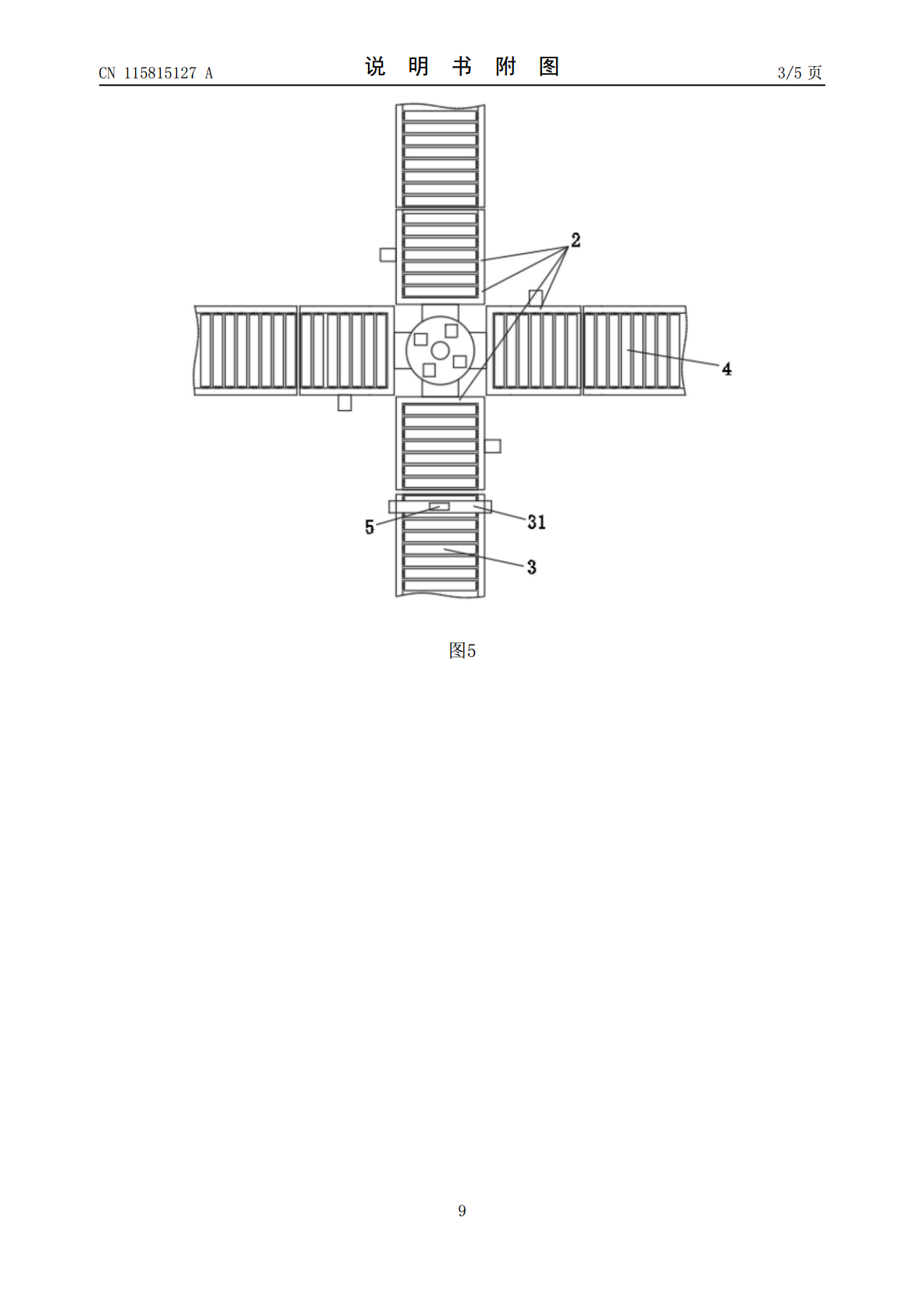
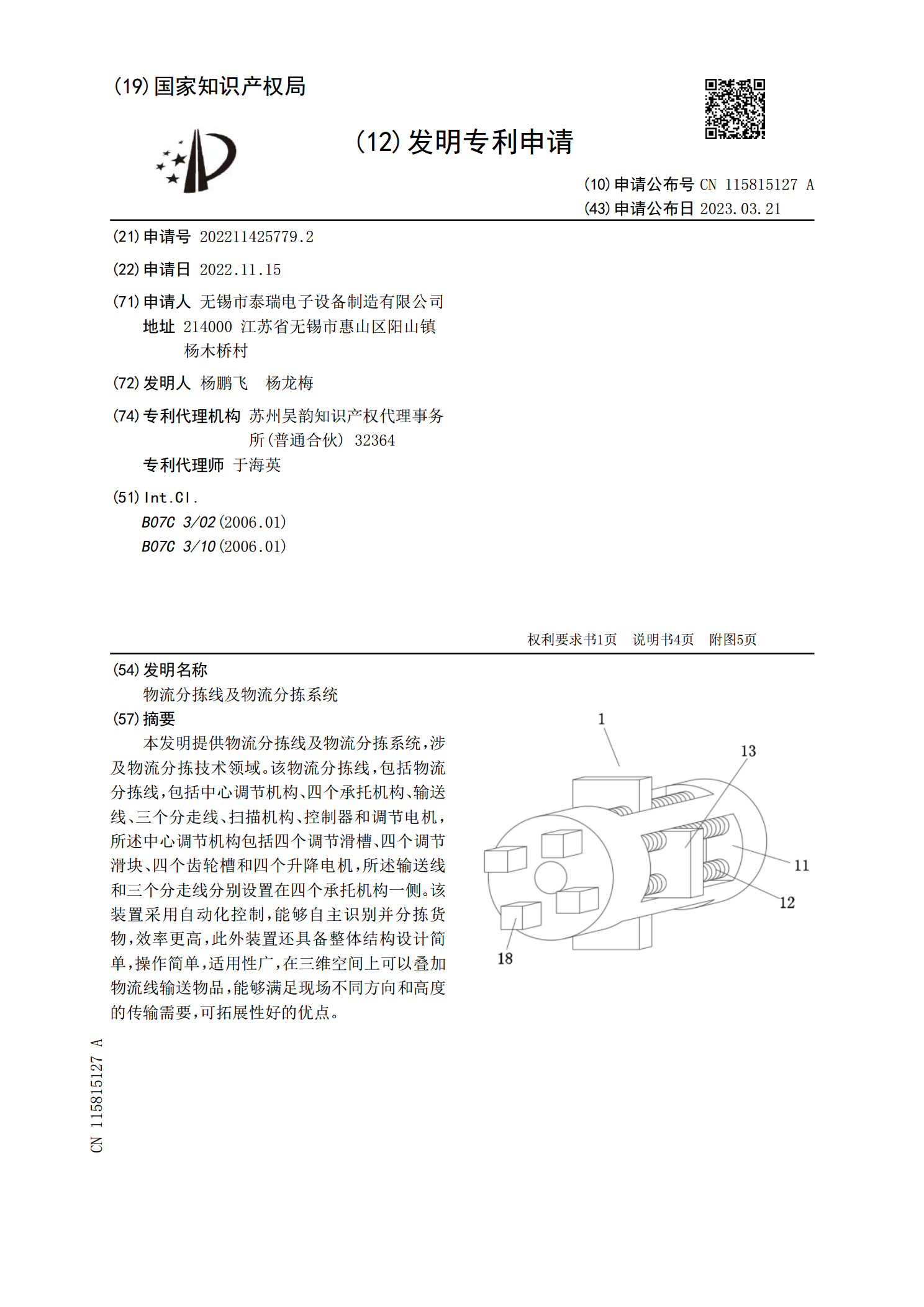
本发明提供物流分拣线及物流分拣系统,涉及物流分拣技术领域。该物流分拣线,包括物流分拣线,包括中心调节机构、四个承托机构、输送线、三个分走线、扫描机构、控制器和调节电机,所述中心调节机构包括四个调节滑槽、四个调节滑块、四个齿轮槽和四个升降电机,所述输送线和三个分走线分别设置在四个承托机构一侧。该装置采用自动化控制,能够自主识别并分拣货物,效率更高,此外装置还具备整体结构设计简单,操作简单,适用性广,在三维空间上可以叠加物流线输送物品,能够满足现场不同方向和高度的传输需要,可拓展性好的优点。

物流分拣系统.pdf
本发明公开一种物流分拣系统,属于物流分拣技术领域。其中,该物流分拣系统包括传送模块、识别模块、分拣模块、储货模块以及中央控制器;传送模块设于分拣模块的前方,识别模块设于传送模块的上方或分拣模块的上方,若干储货模块依次分设分拣模块的两侧,中央控制器分别与传送模块、识别模块、分拣模块以及若干储货模块进行电性连接。本技术方案,通过有效提高物流分拣系统的自动化程度,来解决现有物流分拣系统分拣效率慢的技术问题,同时,通过对物流分拣系统各模块进行合理布局,可进一步简化物流分拣系统的复杂性、提高分拣效率以及保障系统运行
物流分拣系统.pdf
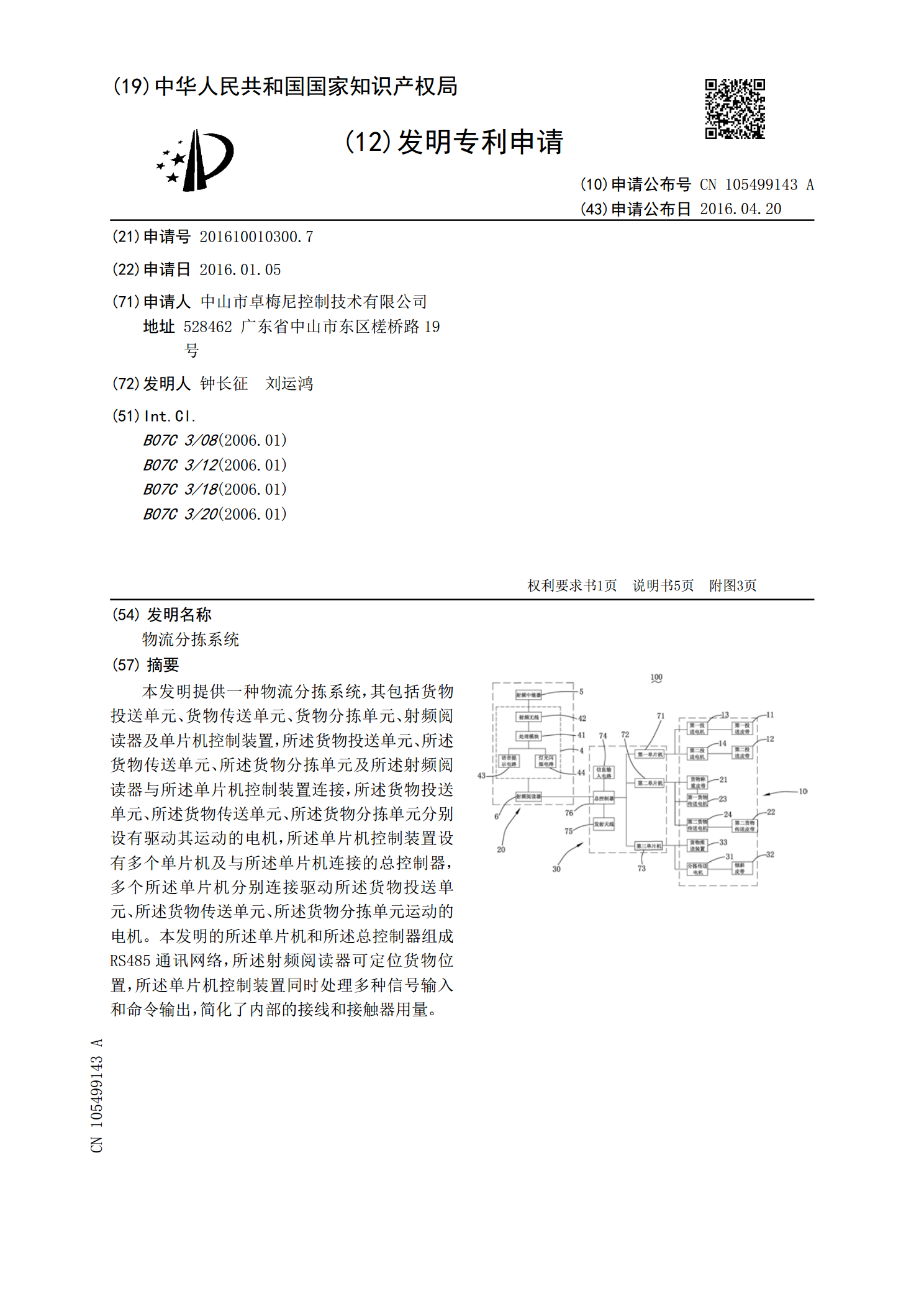
本发明提供一种物流分拣系统,其包括货物投送单元、货物传送单元、货物分拣单元、射频阅读器及单片机控制装置,所述货物投送单元、所述货物传送单元、所述货物分拣单元及所述射频阅读器与所述单片机控制装置连接,所述货物投送单元、所述货物传送单元、所述货物分拣单元分别设有驱动其运动的电机,所述单片机控制装置设有多个单片机及与所述单片机连接的总控制器,多个所述单片机分别连接驱动所述货物投送单元、所述货物传送单元、所述货物分拣单元运动的电机。本发明的所述单片机和所述总控制器组成RS485通讯网络,所述射频阅读器可定位货物位

一种物流分拣系统及物流分拣方法.pdf
本发明公开了一种物流分拣系统及物流分拣方法,待寄货物放在堆放区域中,并将含有收件人地址的RFID标签贴在待寄货物上,人工或机器搬运待寄件逐至输送线上,待寄货物在输送线上运行时,会经过RFID阅读器、摄像头模组和传感器,RFID阅读器读取RFID标签内的信息确认寄出线路正确,摄像头模组拍摄得出图像信息并与数据库内的待寄货物的图像预设阈值信息对比确认寄出货物正确,传感器通过计数器计算货物数量并与数据库的货物预设数量值对比确认货物数量正确,寄件进行分类,有效降低人工分拣的出错率。
一种物流分拣设备及基于云计算的物流分拣系统.pdf
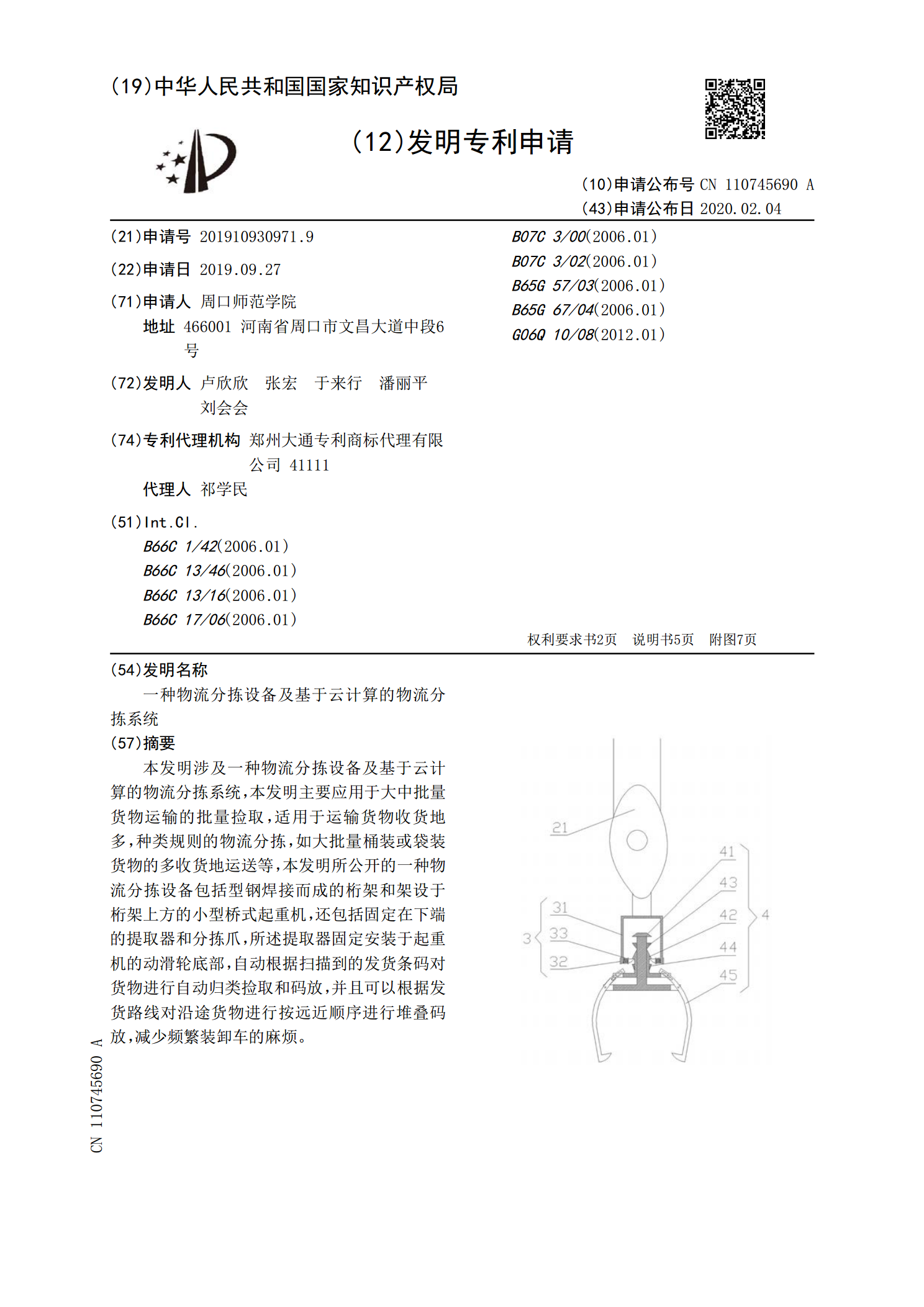
本发明涉及一种物流分拣设备及基于云计算的物流分拣系统,本发明主要应用于大中批量货物运输的批量捡取,适用于运输货物收货地多,种类规则的物流分拣,如大批量桶装或袋装货物的多收货地运送等,本发明所公开的一种物流分拣设备包括型钢焊接而成的桁架和架设于桁架上方的小型桥式起重机,还包括固定在下端的提取器和分拣爪,所述提取器固定安装于起重机的动滑轮底部,自动根据扫描到的发货条码对货物进行自动归类捡取和码放,并且可以根据发货路线对沿途货物进行按远近顺序进行堆叠码放,减少频繁装卸车的麻烦。