
双侧独立电驱动履带车电机转矩计算方法.pdf

努力****振宇

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共12页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
双侧独立电驱动履带车电机转矩计算方法.pdf
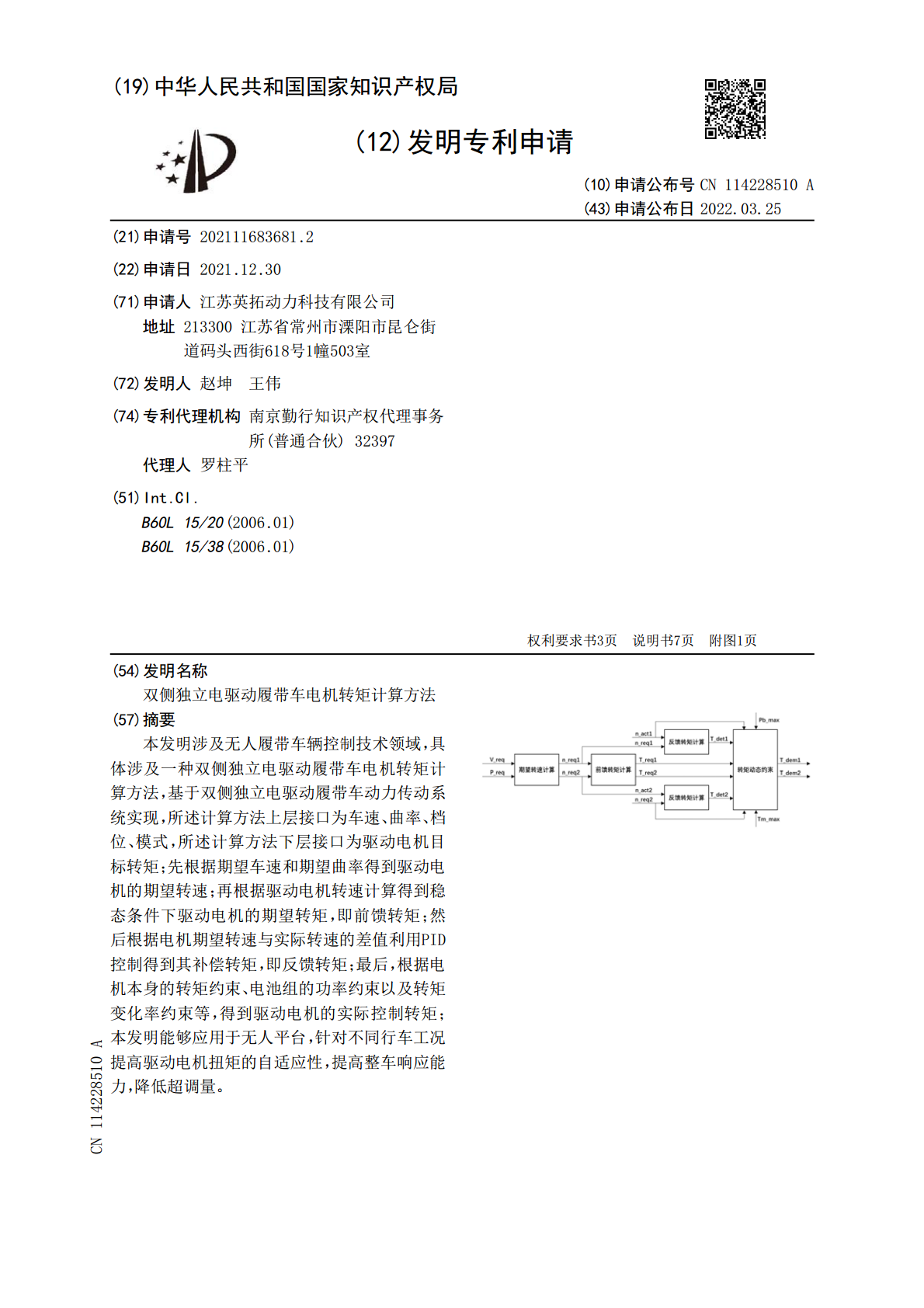
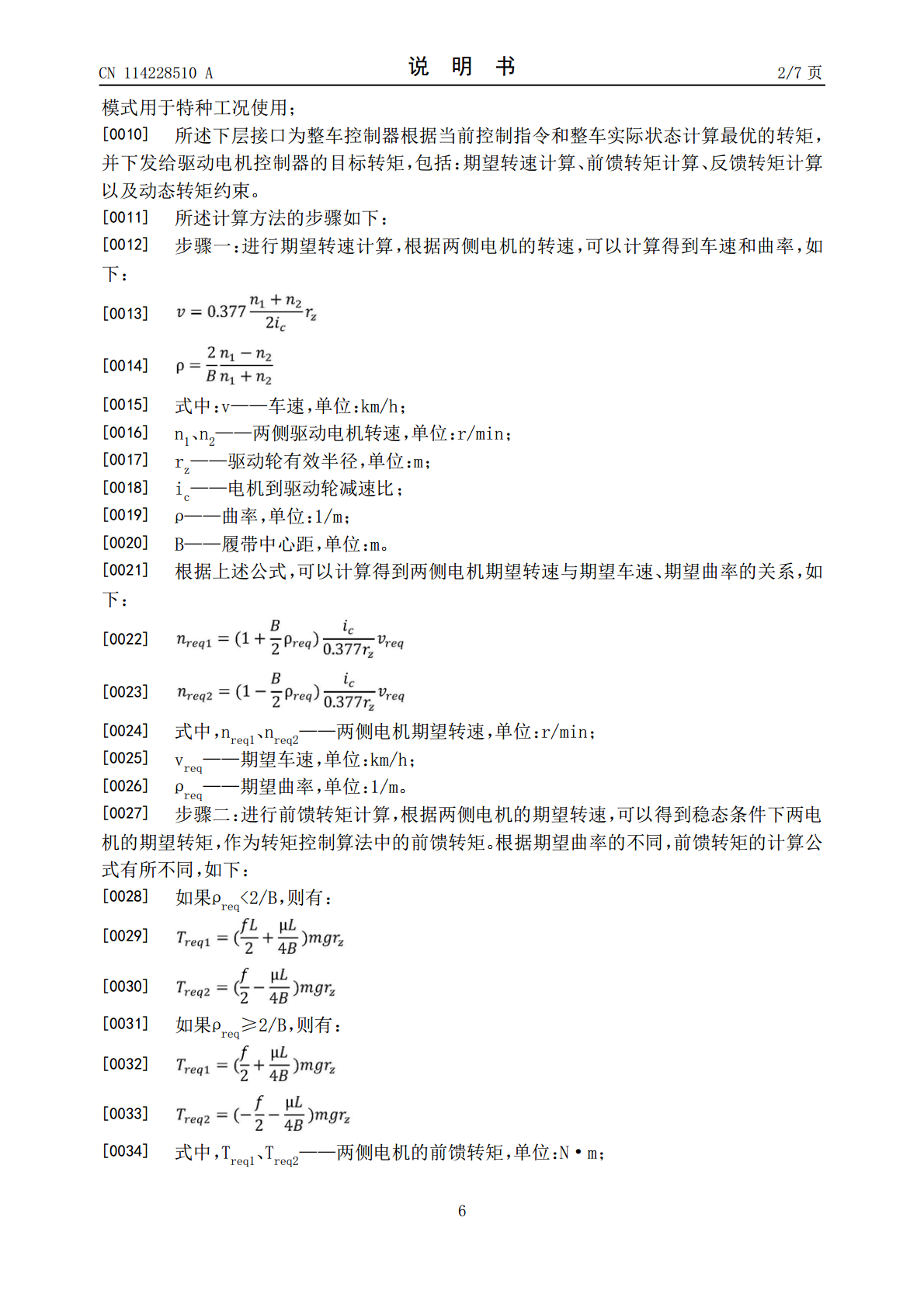
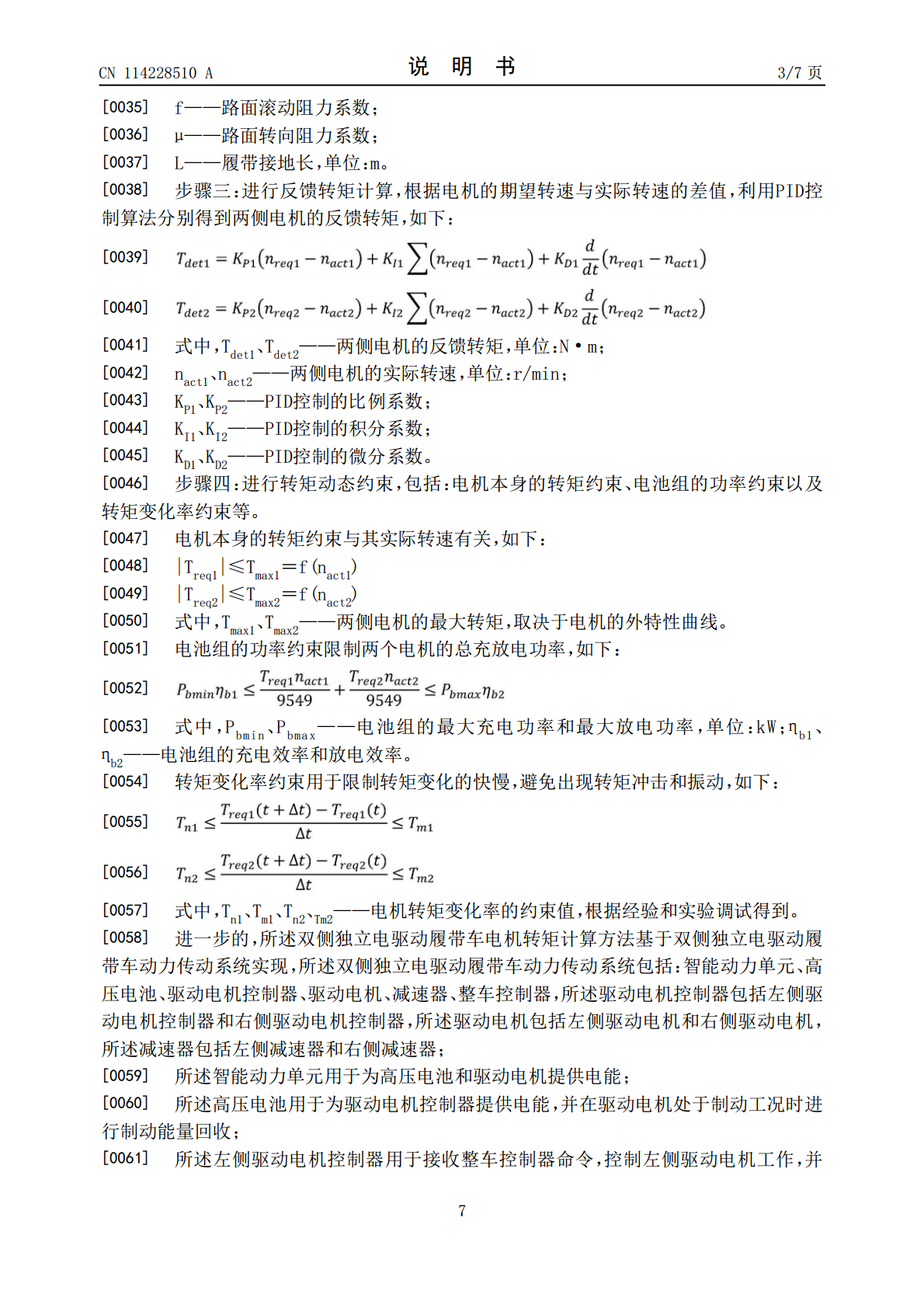
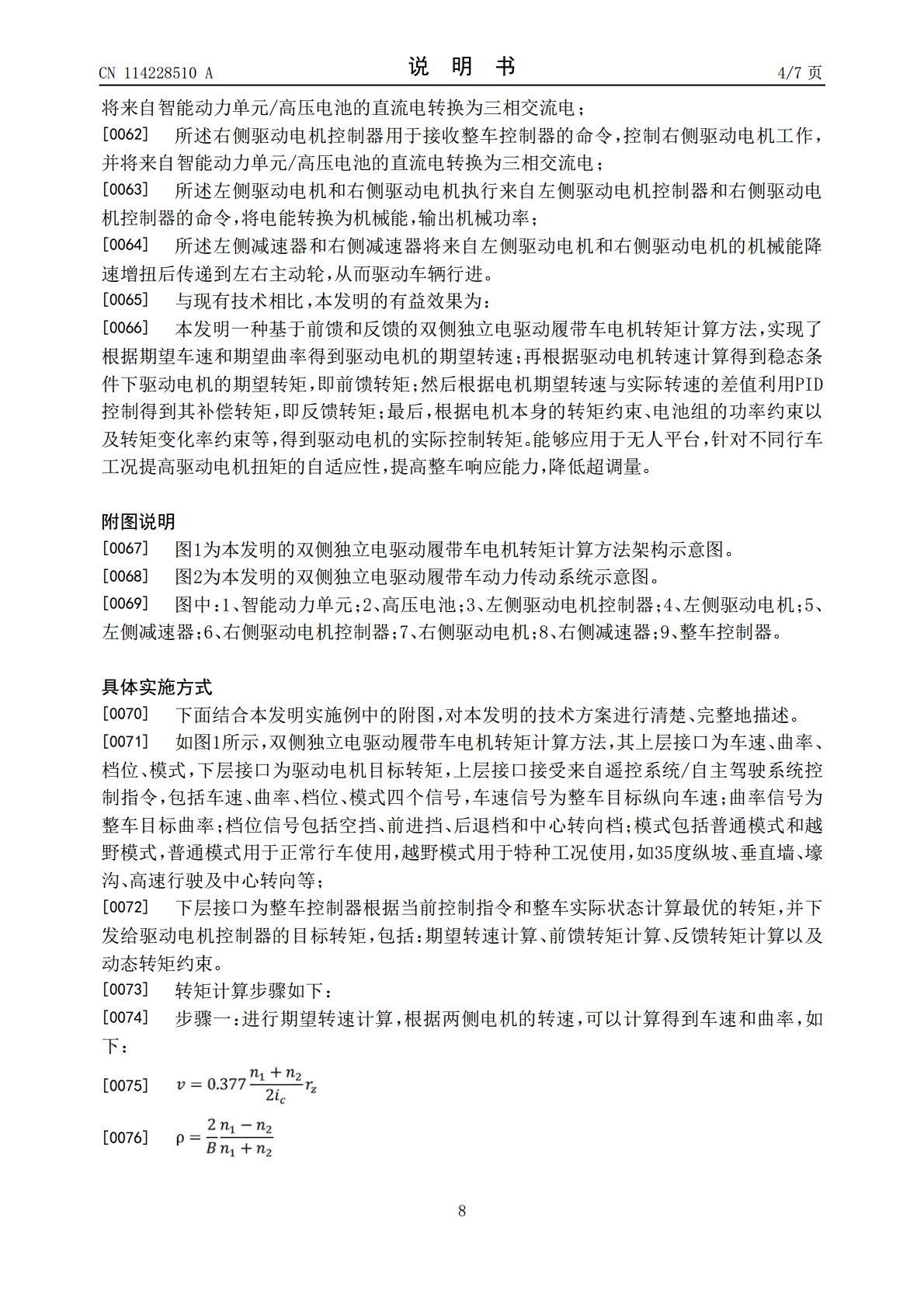
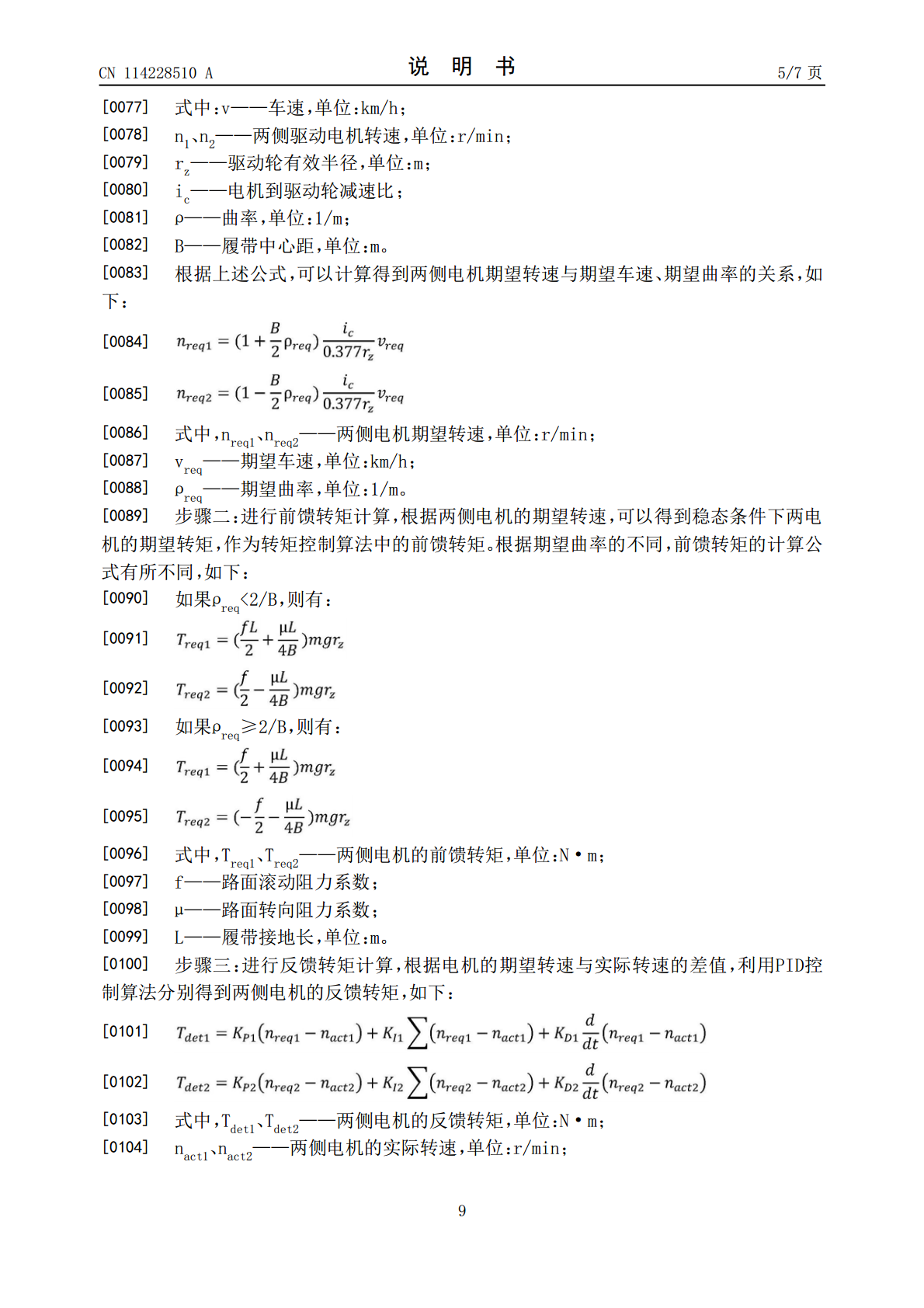
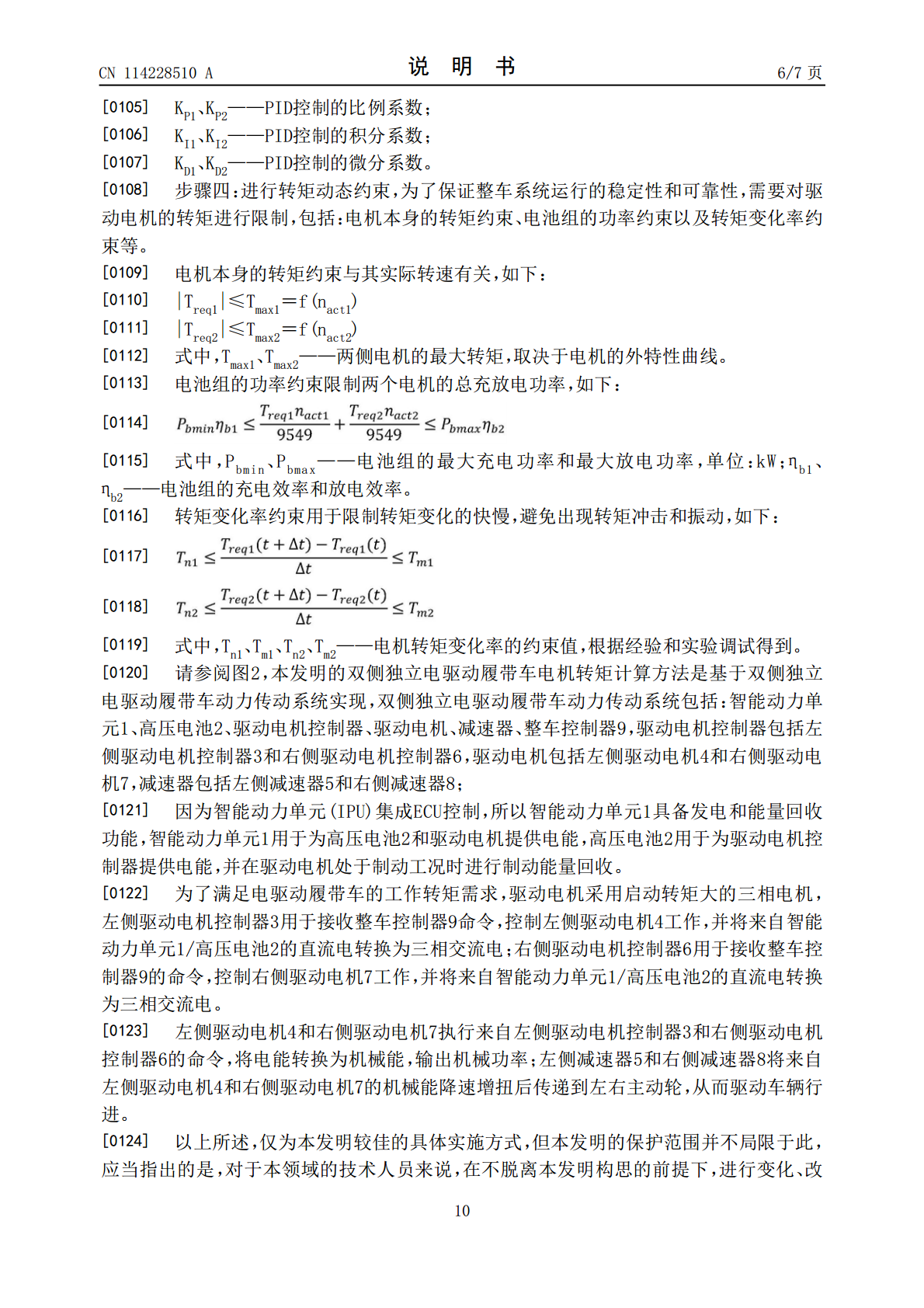
本发明涉及无人履带车辆控制技术领域,具体涉及一种双侧独立电驱动履带车电机转矩计算方法,基于双侧独立电驱动履带车动力传动系统实现,所述计算方法上层接口为车速、曲率、档位、模式,所述计算方法下层接口为驱动电机目标转矩;先根据期望车速和期望曲率得到驱动电机的期望转速;再根据驱动电机转速计算得到稳态条件下驱动电机的期望转矩,即前馈转矩;然后根据电机期望转速与实际转速的差值利用PID控制得到其补偿转矩,即反馈转矩;最后,根据电机本身的转矩约束、电池组的功率约束以及转矩变化率约束等,得到驱动电机的实际控制转矩;本发明
双侧独立电驱动履带车转向制动工况下轨迹保持方法.pdf
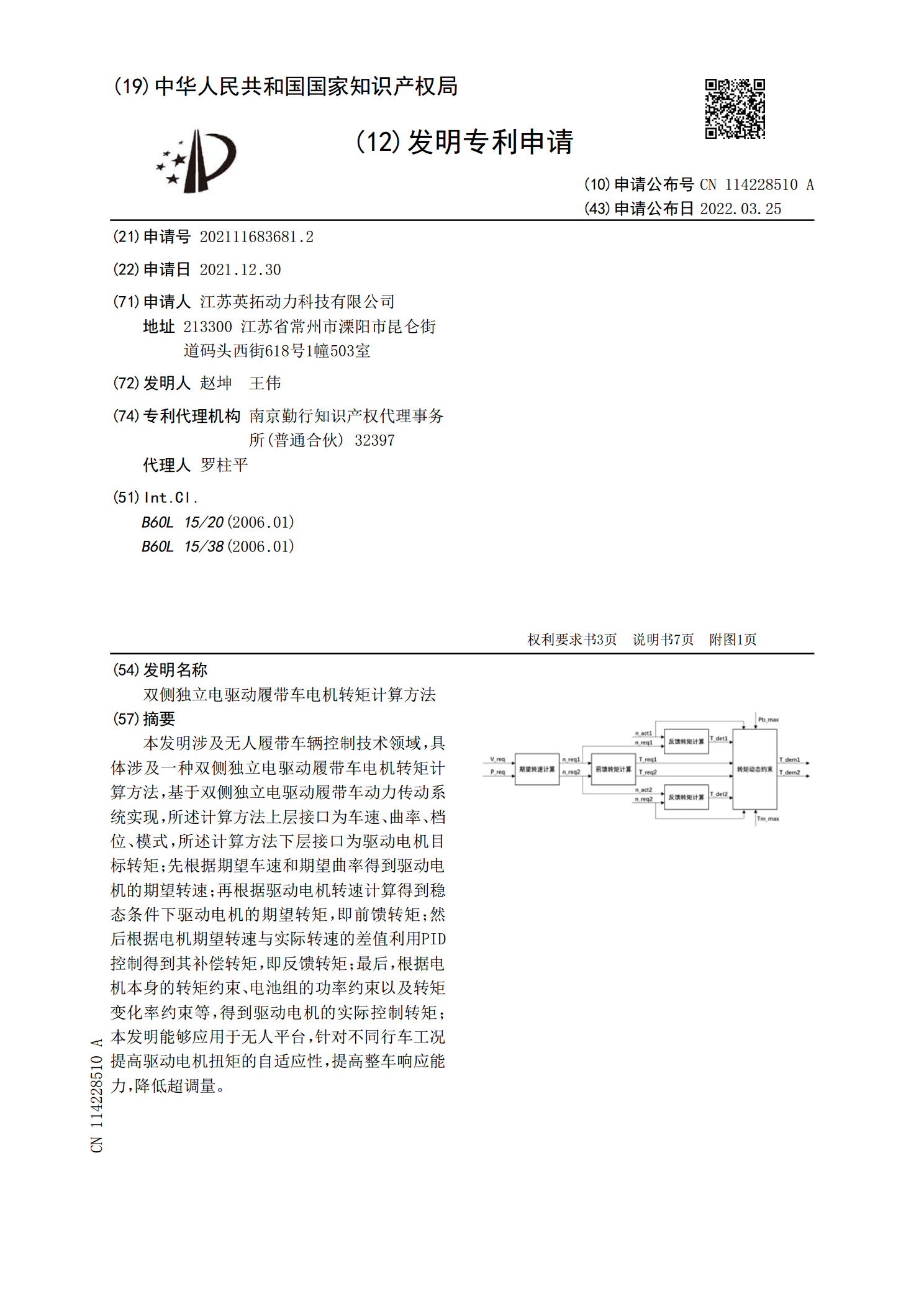
本发明提供双侧独立电驱动双侧独立电驱动履带车转向制动工况下轨迹保持方法,包括以下步骤:监测目标履带车行驶路径曲率;监测减速后履带车行驶路径曲率和行驶车速;确定减速后内侧车速和减速后外侧车速;确定目标内侧车速和外侧车速;基于履带车减速后内外侧车速与目标内外侧车速的差值和履带车减速后内外侧车速按变参数PI的方法确定内外侧转矩;基于所确定内外侧转矩控制所述履带车。采用闭环控制的方式调节行驶曲率,控制两侧驱动电机转矩,使其介入转向制动工况。双侧独立电驱动履带车在转向制动工况下,利用电机转矩补偿,使得行驶轨迹与减速
一种双侧电机驱动履带车辆转向系统.pdf
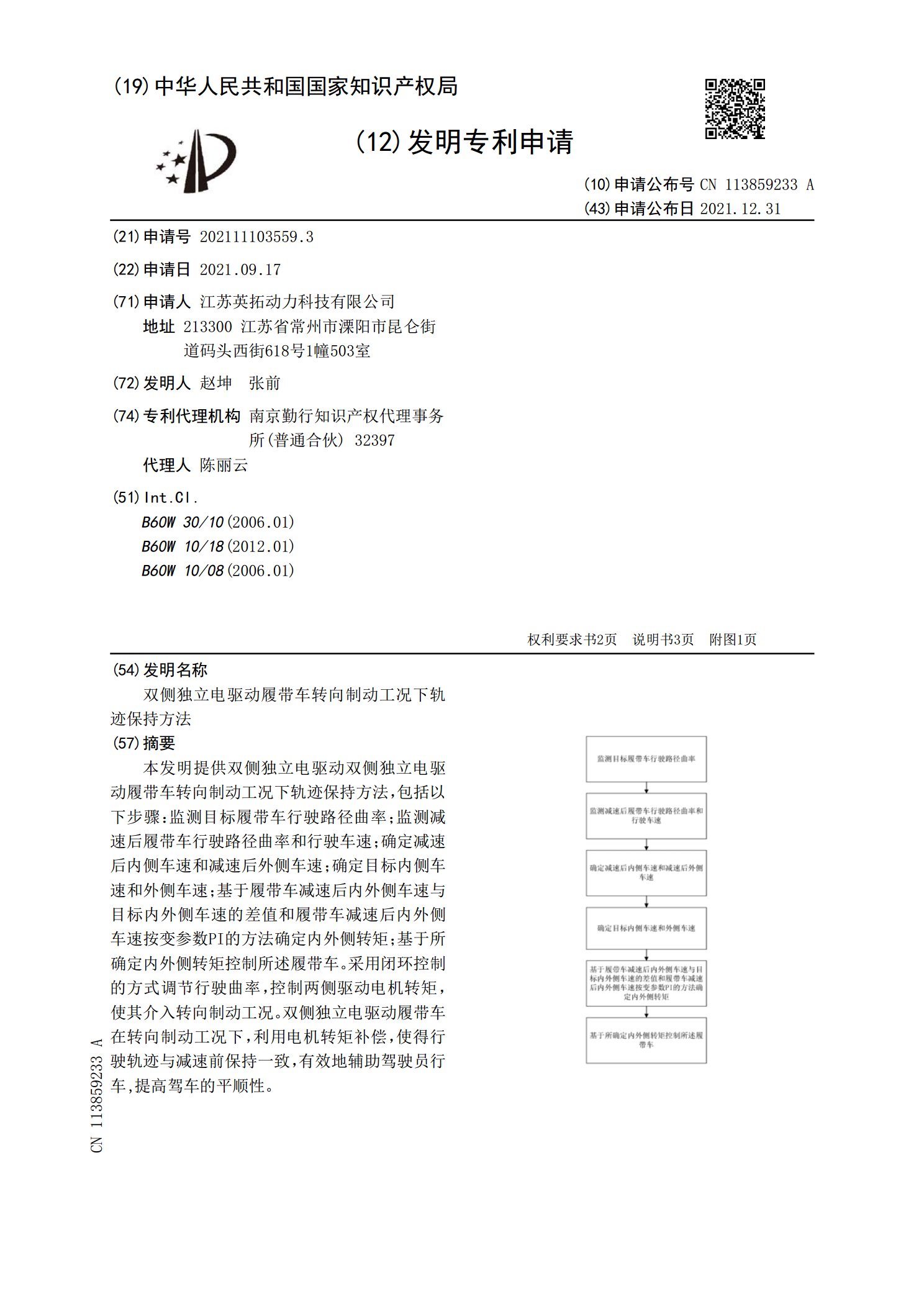
本发明提供一种双侧电机驱动履带车辆转向系统,包括控制系统、动力系统及机械系统,该机械系统包括驱动电机、制动器及减速器,减速器与车辆主动轮相连;该机械系统进一步包括转向电机控制器、转向电机、可控差速器、离合器以及耦合器;其中转向电机控制器、转向电机、可控差速器、离合器及耦合器的一个输入端顺次连接,耦合器的另一输入端与驱动电机相连,耦合器的输出端与制动器相连,转向电机控制器、可控差速器及离合器进一步与控制系统相连。本发明通过在机械系统中设置转向电机,通过耦合器对转向电机和驱动电机所提供的转矩进行耦合,这样可以

一种电驱动履带车辆转向电机与单侧驱动电机耦合转向系统.pdf
本发明涉及一种电驱动履带车辆转向电机与单侧驱动电机耦合转向系统,用于双侧电机驱动履带车辆的转向行驶。转向系统包括机械系统和电气系统,其中电气系统又包括动力系统和控制系统。当转向所需功率小于单侧电机最大功率时,采用电子差速转向方式。当转向所需功率大于单侧驱动电机最大功率时,采用机械耦合实现转向。综合电子控制器通过CAN总线控制内侧电磁离合器的分离和外侧电磁离合器的结合,使得转向电机依次通过外侧电磁离合器和外侧行星耦合器,通过外侧行星耦合器与外侧驱动电机的动力进行耦合,驱动外侧主动轮,来满足转向电机功率需求。

一种电传动履带车辆双侧电机耦合驱动转向系统.pdf
本发明涉及一种电传动履带车辆双侧电机耦合驱动转向系统,用于双侧电机驱动履带车辆的转向行驶。转向系统包括机械系统和电气系统,其中电气系统又包括动力系统和控制系统。当转向所需功率小于单侧电机最大功率时,采用双侧电机独立驱动电子控制差速转向;当转向所需功率大于单侧电机最大功率时,采用双侧电机耦合驱动方式实现转向,这种情况下外侧电机提供的转矩不能满足转向所需转矩,此时内侧电机通过内侧行星齿轮耦合器,将动力依次传递给中央电磁离合器和外侧行星齿轮耦合器,通过外侧行星齿轮耦合器与来自外侧驱动电机的动力耦合,驱动外侧主动