
一种基于单路口多传感器的航迹融合方法及系统.pdf

一只****签网

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种基于单路口多传感器的航迹融合方法及系统.pdf
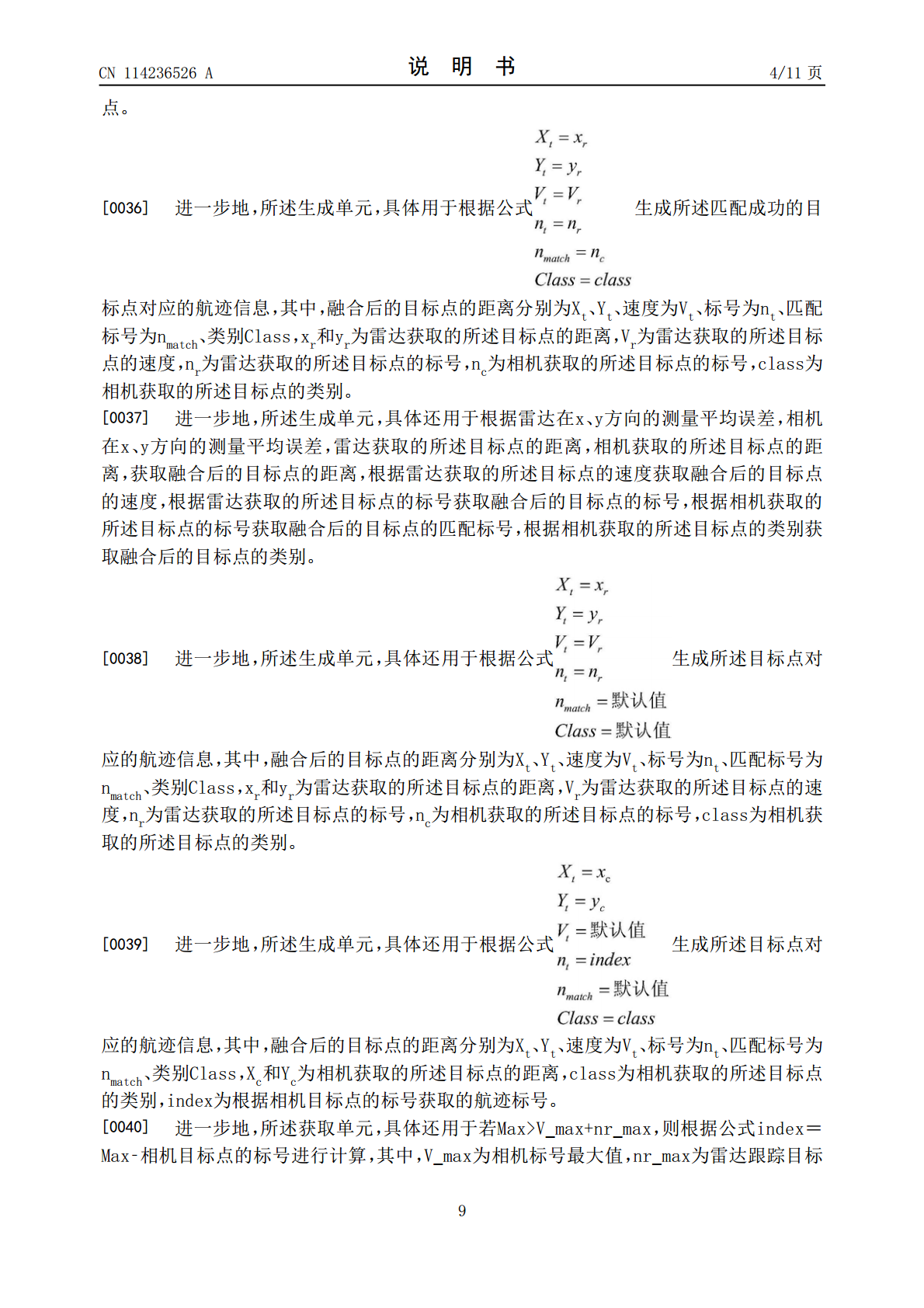
本发明公开一种基于单路口多传感器的航迹融合方法及系统,涉及路口智能车辆管理领域,包括:首先根据预置数据关联算法和当前帧各个目标点的雷达距离信息和相机距离信息,确定当前帧中匹配成功的目标点和匹配不成功的目标点,然后针对不同情况的目标点采取不同的航迹信息的生成策略,不需要进行卡尔曼滤波,因此通用性强,适用于多种视频跟踪算法和雷达跟踪算法的分布式传感器航迹管理,同时本发明是根据目标点的类型选取对应的航迹信息生成策略,可以减少数据融合过程的计算量和误差。
一种基于多传感器数据融合算法的运动目标航迹感知方法.pdf
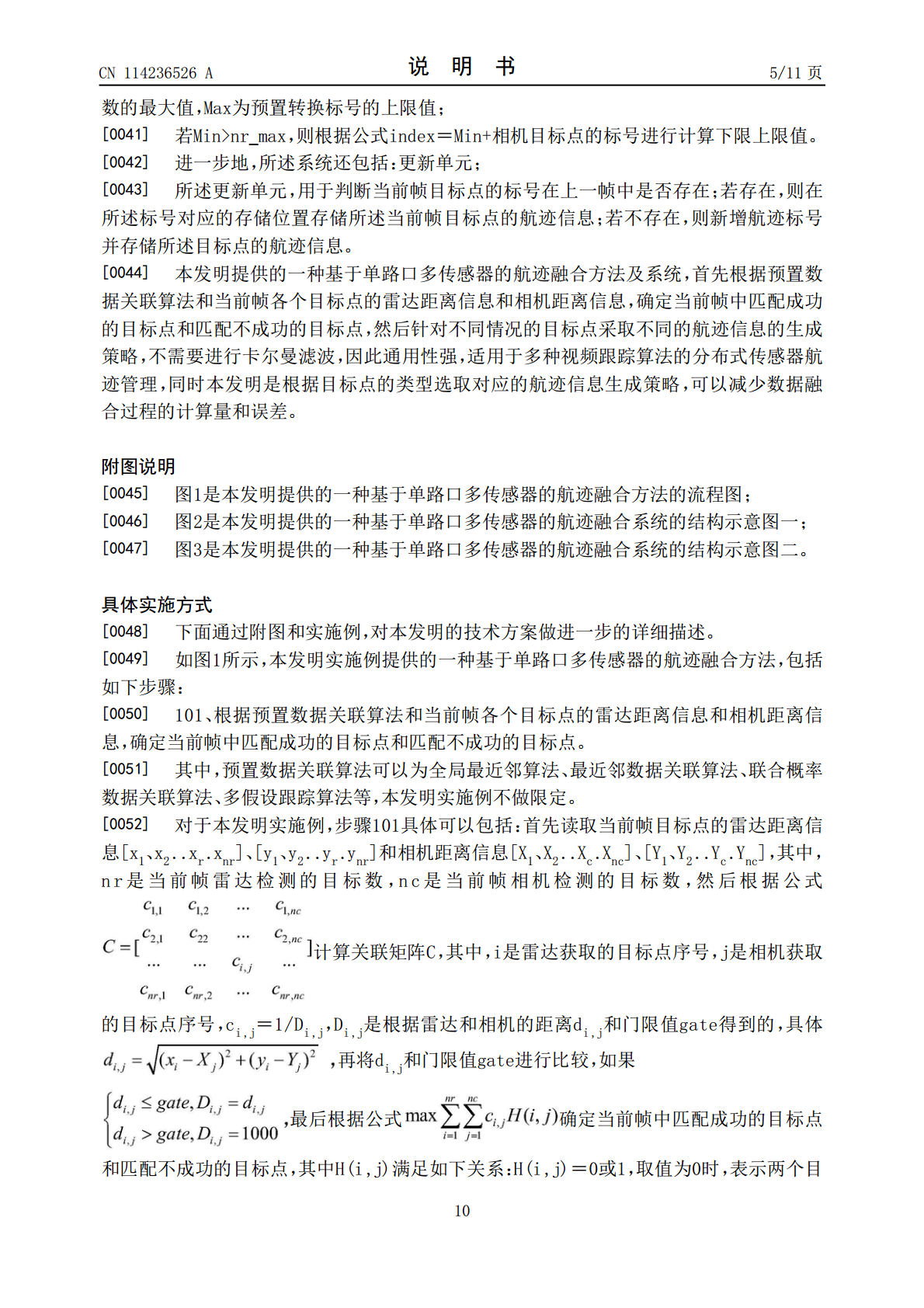
本发明涉及信息处理领域,具体说是一种基于多传感器数据融合算法的运动目标航迹感知方法。包括以下步骤:通过初始状态下的目标所在位置原点,以正东方向为X轴正向,根据右手定则建立绝对坐标系;将多种类型传感器采集的目标航迹信息转换为在绝对坐标系下目标航迹量测矩阵;多种类型传感器进行目标航迹信息匹配,对某种传感器采集目标的丢失情况进行处理,对多种类型传感器的目标航迹信息进行融合,得到融合后的目标航迹量测矩阵,即融合信息;将融合信息作为参数输入,利用最小二乘法进行数据融合,获取融合结果,并将融合结果添加至目标列表,得到
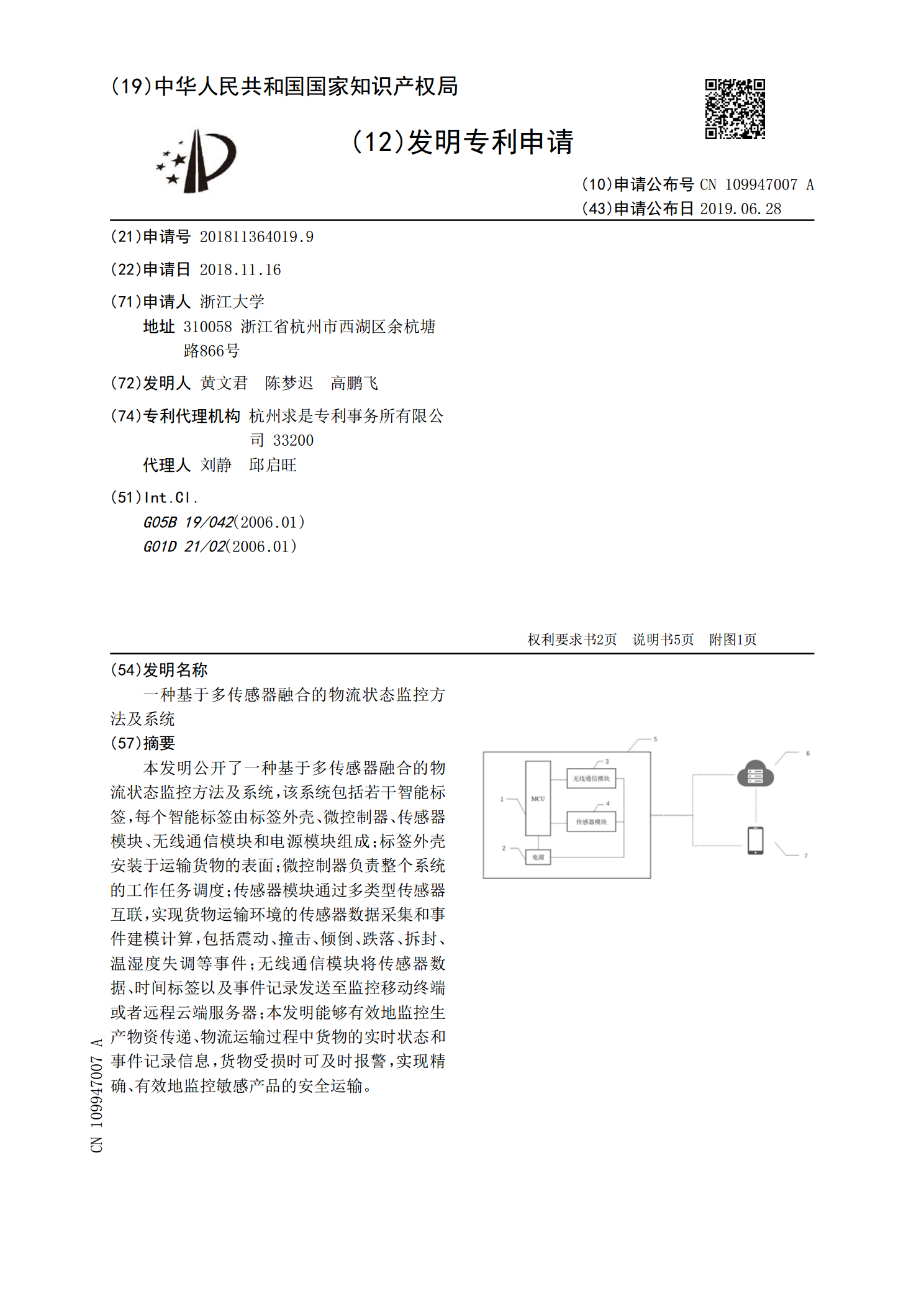
一种基于多传感器融合的物流状态监控方法及系统.pdf
本发明公开了一种基于多传感器融合的物流状态监控方法及系统,该系统包括若干智能标签,每个智能标签由标签外壳、微控制器、传感器模块、无线通信模块和电源模块组成;标签外壳安装于运输货物的表面;微控制器负责整个系统的工作任务调度;传感器模块通过多类型传感器互联,实现货物运输环境的传感器数据采集和事件建模计算,包括震动、撞击、倾倒、跌落、拆封、温湿度失调等事件;无线通信模块将传感器数据、时间标签以及事件记录发送至监控移动终端或者远程云端服务器;本发明能够有效地监控生产物资传递、物流运输过程中货物的实时状态和事件记录

基于多传感器融合的GNSS倾斜测量系统及方法.pdf
本发明实施例公开基于多传感器融合的GNSS倾斜测量系统及方法。包括:接收模块,用于利用天线接收卫星信号,并控制接收机板卡依据卫星信号,得到伪距、多普勒相位观测量以及载波相位观测量;解算模块,用于综合伪距、多普勒相位观测量以及载波相位观测量,计算得到天线的第一位置信息和第一速度信息;测量模块,用于接收传感器的原始观测量,并对原始观测量、第一位置信息以及第一速度信息进行数据融合,得到天线的第二位置信息和姿态信息,以及综合收到的对中杆信息、第二位置信息以及姿态信息,得到对中杆的底部坐标信息。实施本发明实施例,能
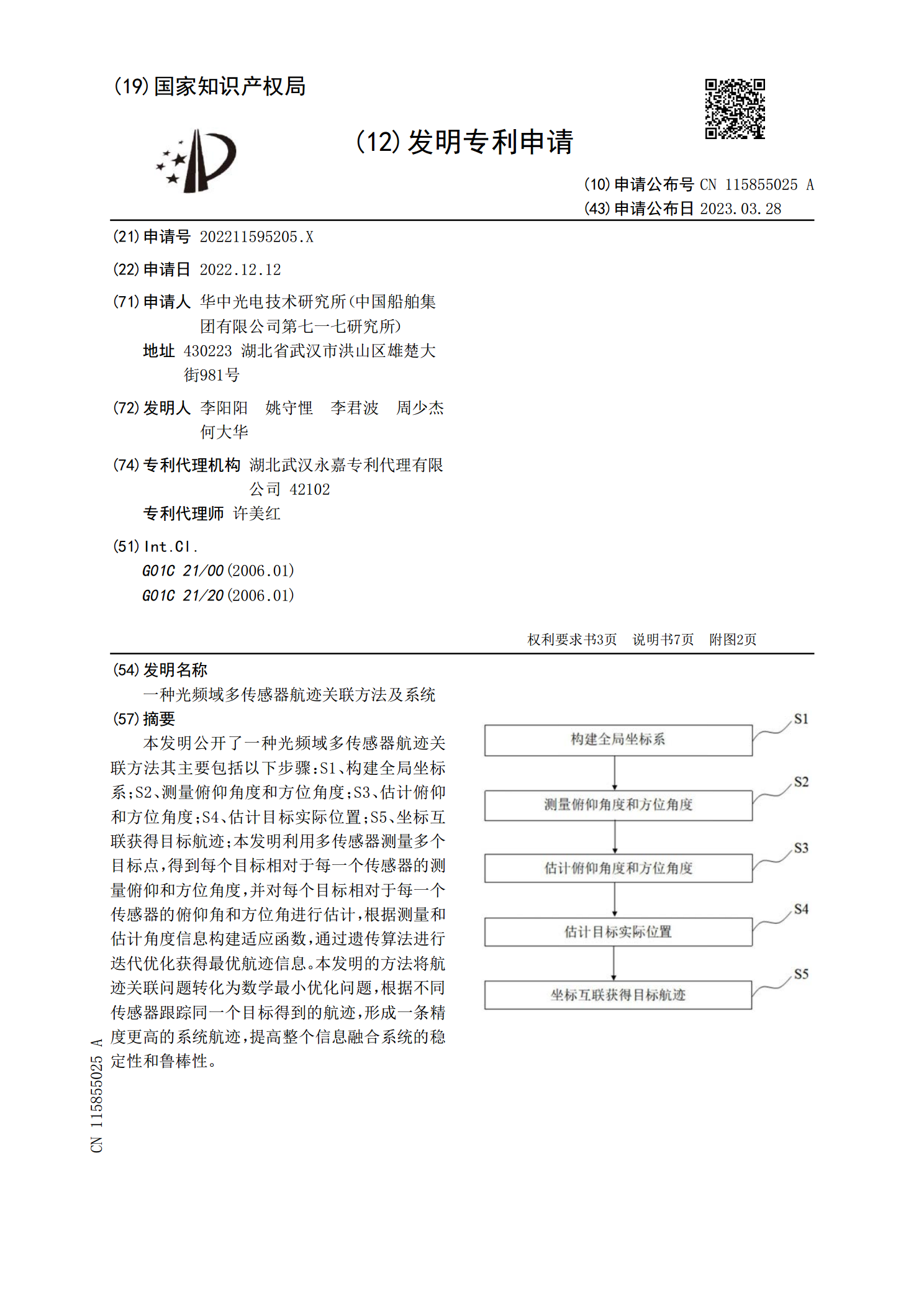
一种光频域多传感器航迹关联方法及系统.pdf
本发明公开了一种光频域多传感器航迹关联方法其主要包括以下步骤:S1、构建全局坐标系;S2、测量俯仰角度和方位角度;S3、估计俯仰和方位角度;S4、估计目标实际位置;S5、坐标互联获得目标航迹;本发明利用多传感器测量多个目标点,得到每个目标相对于每一个传感器的测量俯仰和方位角度,并对每个目标相对于每一个传感器的俯仰角和方位角进行估计,根据测量和估计角度信息构建适应函数,通过遗传算法进行迭代优化获得最优航迹信息。本发明的方法将航迹关联问题转化为数学最小优化问题,根据不同传感器跟踪同一个目标得到的航迹,形成一条