
基于多传感器融合的GNSS倾斜测量系统及方法.pdf

英瑞****写意


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

基于多传感器融合的GNSS倾斜测量系统及方法.pdf
本发明实施例公开基于多传感器融合的GNSS倾斜测量系统及方法。包括:接收模块,用于利用天线接收卫星信号,并控制接收机板卡依据卫星信号,得到伪距、多普勒相位观测量以及载波相位观测量;解算模块,用于综合伪距、多普勒相位观测量以及载波相位观测量,计算得到天线的第一位置信息和第一速度信息;测量模块,用于接收传感器的原始观测量,并对原始观测量、第一位置信息以及第一速度信息进行数据融合,得到天线的第二位置信息和姿态信息,以及综合收到的对中杆信息、第二位置信息以及姿态信息,得到对中杆的底部坐标信息。实施本发明实施例,能
基于GNSS和多传感器融合的农情综合监测系统和装置.pdf
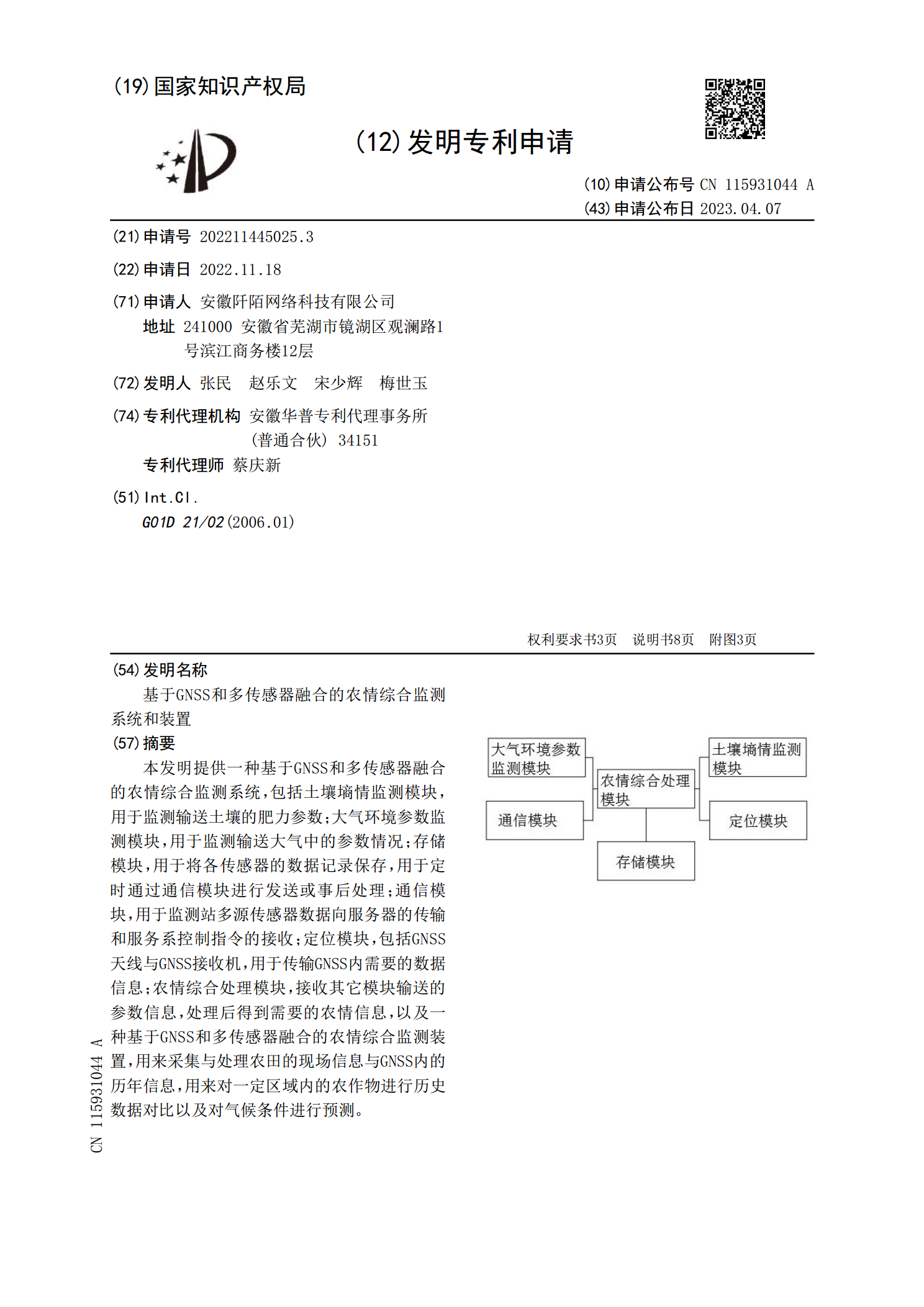
本发明提供一种基于GNSS和多传感器融合的农情综合监测系统,包括土壤墒情监测模块,用于监测输送土壤的肥力参数;大气环境参数监测模块,用于监测输送大气中的参数情况;存储模块,用于将各传感器的数据记录保存,用于定时通过通信模块进行发送或事后处理;通信模块,用于监测站多源传感器数据向服务器的传输和服务系控制指令的接收;定位模块,包括GNSS天线与GNSS接收机,用于传输GNSS内需要的数据信息;农情综合处理模块,接收其它模块输送的参数信息,处理后得到需要的农情信息,以及一种基于GNSS和多传感器融合的农情综合监

基于多传感器信息融合的机床测量数据自动补偿系统.docx
基于多传感器信息融合的机床测量数据自动补偿系统1.内容概要本文档主要介绍了一种基于多传感器信息融合的机床测量数据自动补偿系统。该系统通过收集和整合来自不同传感器(如位置、速度、加速度等)的数据,利用先进的信息融合技术和算法对这些数据进行处理和分析,从而实现对机床测量数据的实时、准确和自动补偿。这种自动补偿系统在提高机床加工精度、降低误差和提高生产效率方面具有重要意义。该系统还具有良好的稳定性、可靠性和可扩展性,为制造业提供了一种有效的解决方案。1.1研究背景随着科学技术的飞速发展,机床测量技术在制造业中扮
一种基于多传感器数据融合的浅地层剖面测量方法及系统.pdf
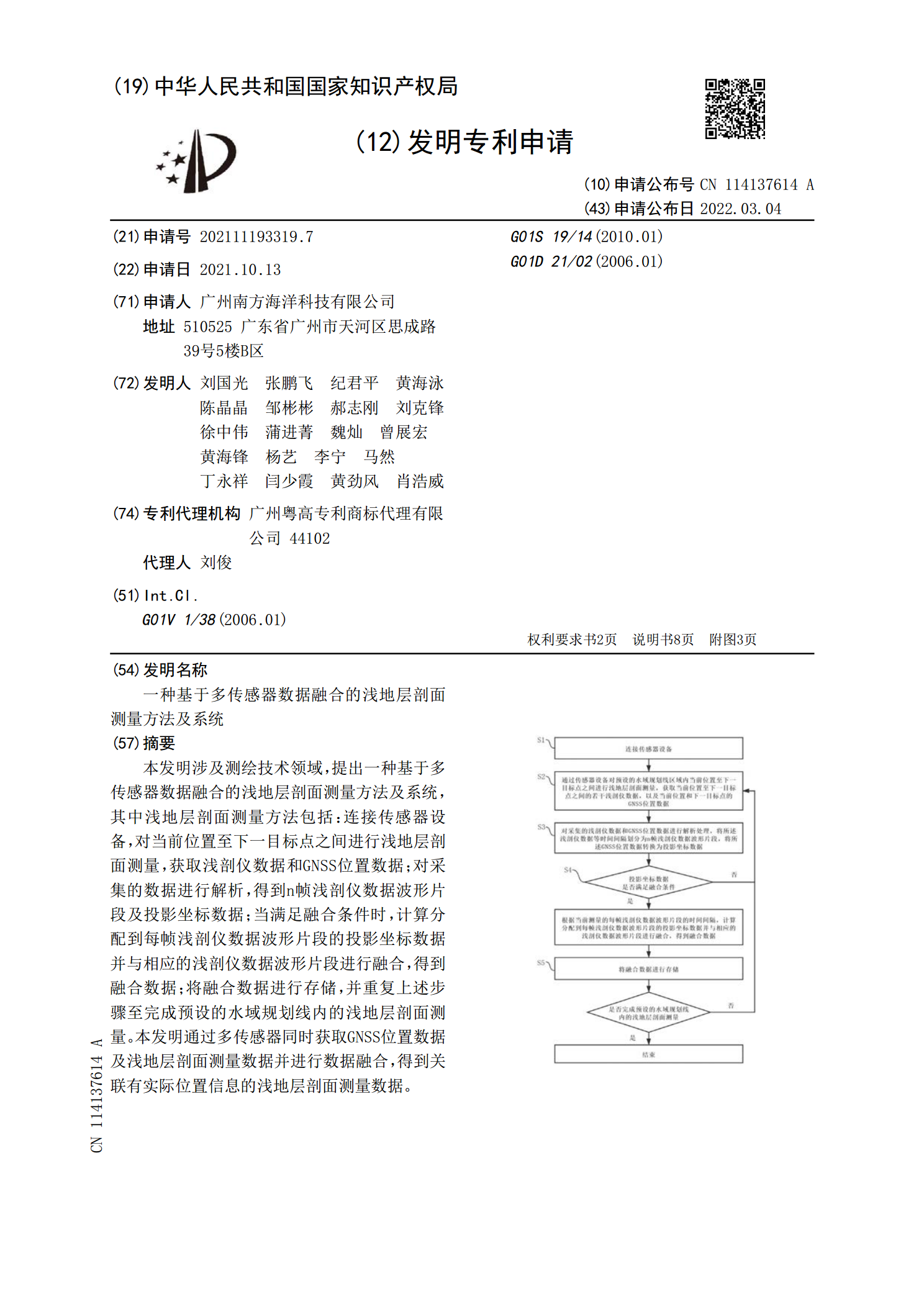
本发明涉及测绘技术领域,提出一种基于多传感器数据融合的浅地层剖面测量方法及系统,其中浅地层剖面测量方法包括:连接传感器设备,对当前位置至下一目标点之间进行浅地层剖面测量,获取浅剖仪数据和GNSS位置数据;对采集的数据进行解析,得到n帧浅剖仪数据波形片段及投影坐标数据;当满足融合条件时,计算分配到每帧浅剖仪数据波形片段的投影坐标数据并与相应的浅剖仪数据波形片段进行融合,得到融合数据;将融合数据进行存储,并重复上述步骤至完成预设的水域规划线内的浅地层剖面测量。本发明通过多传感器同时获取GNSS位置数据及浅地层
一种基于单路口多传感器的航迹融合方法及系统.pdf
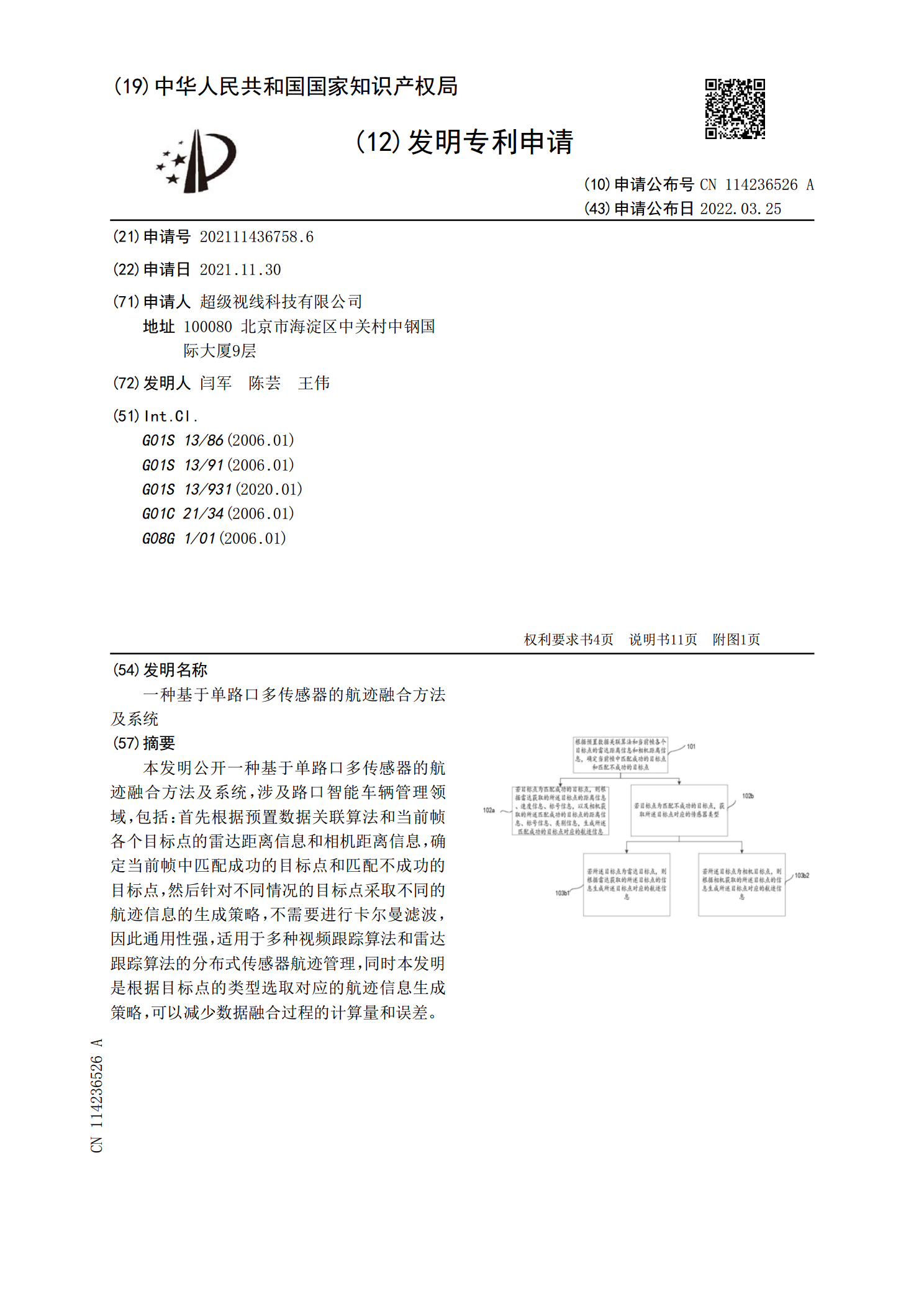
本发明公开一种基于单路口多传感器的航迹融合方法及系统,涉及路口智能车辆管理领域,包括:首先根据预置数据关联算法和当前帧各个目标点的雷达距离信息和相机距离信息,确定当前帧中匹配成功的目标点和匹配不成功的目标点,然后针对不同情况的目标点采取不同的航迹信息的生成策略,不需要进行卡尔曼滤波,因此通用性强,适用于多种视频跟踪算法和雷达跟踪算法的分布式传感器航迹管理,同时本发明是根据目标点的类型选取对应的航迹信息生成策略,可以减少数据融合过程的计算量和误差。