
一种光频域多传感器航迹关联方法及系统.pdf

睿德****找我

1/10
2/10

3/10
4/10

5/10

6/10
7/10
8/10
9/10

10/10
亲,该文档总共13页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
一种光频域多传感器航迹关联方法及系统.pdf
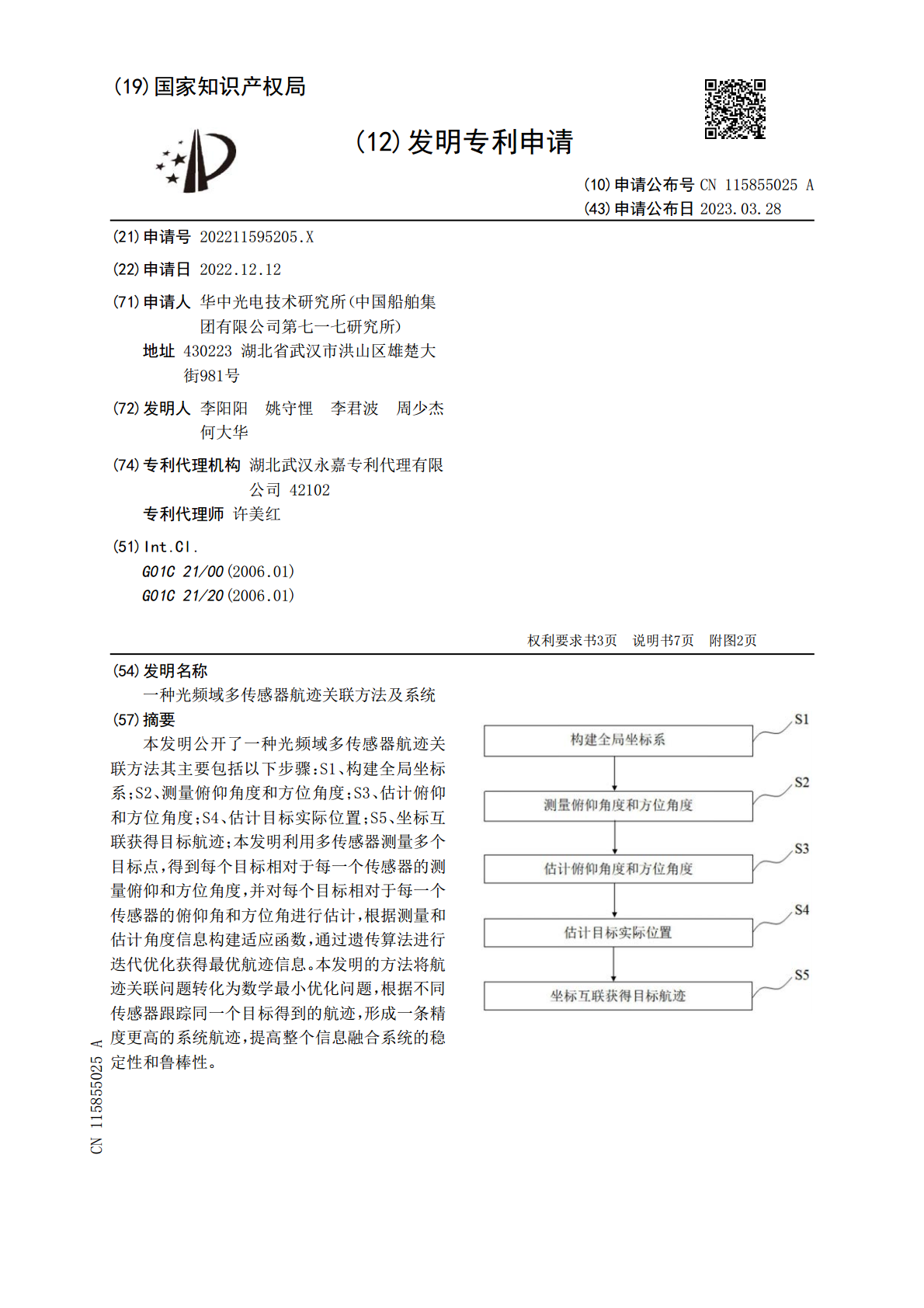
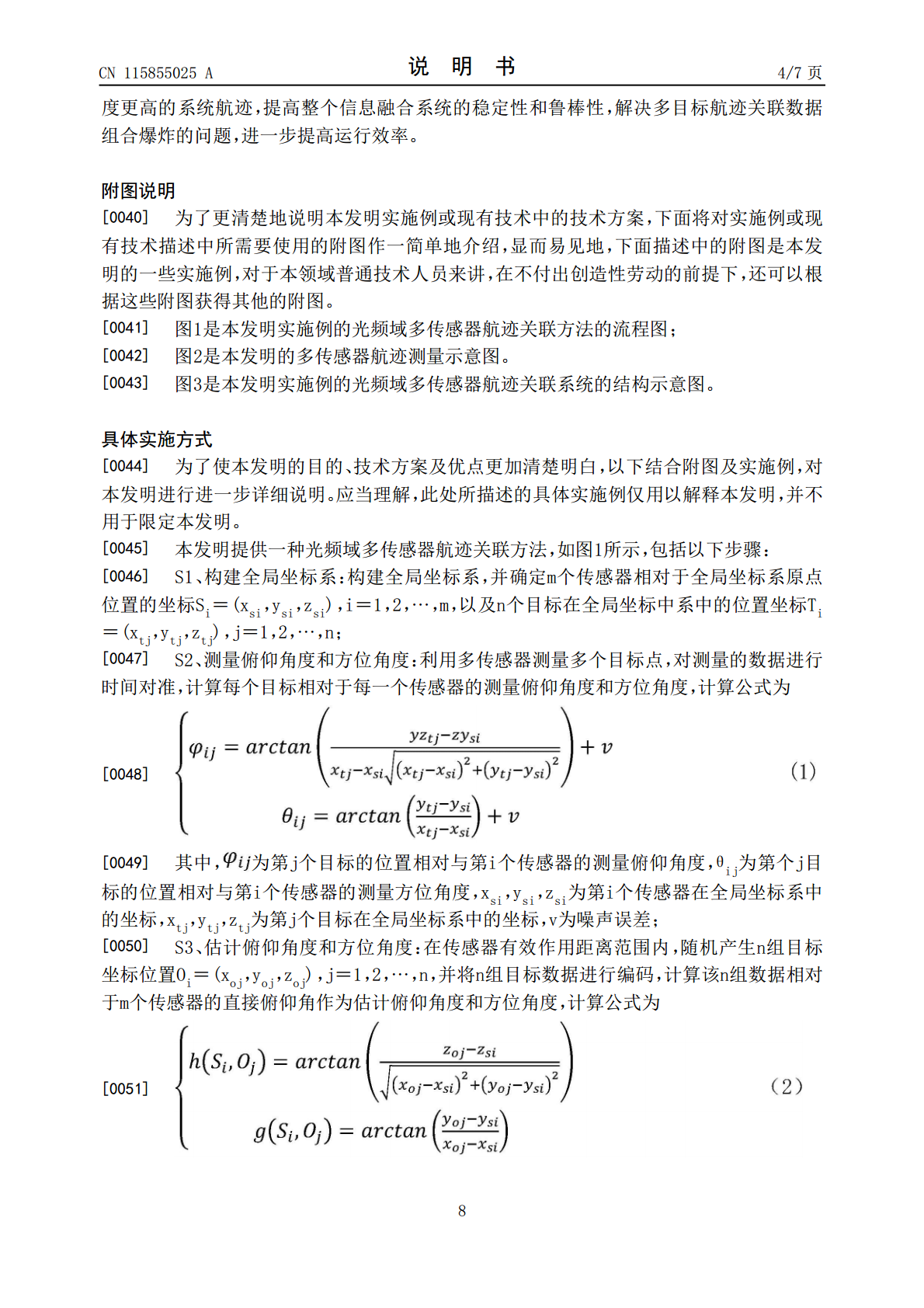
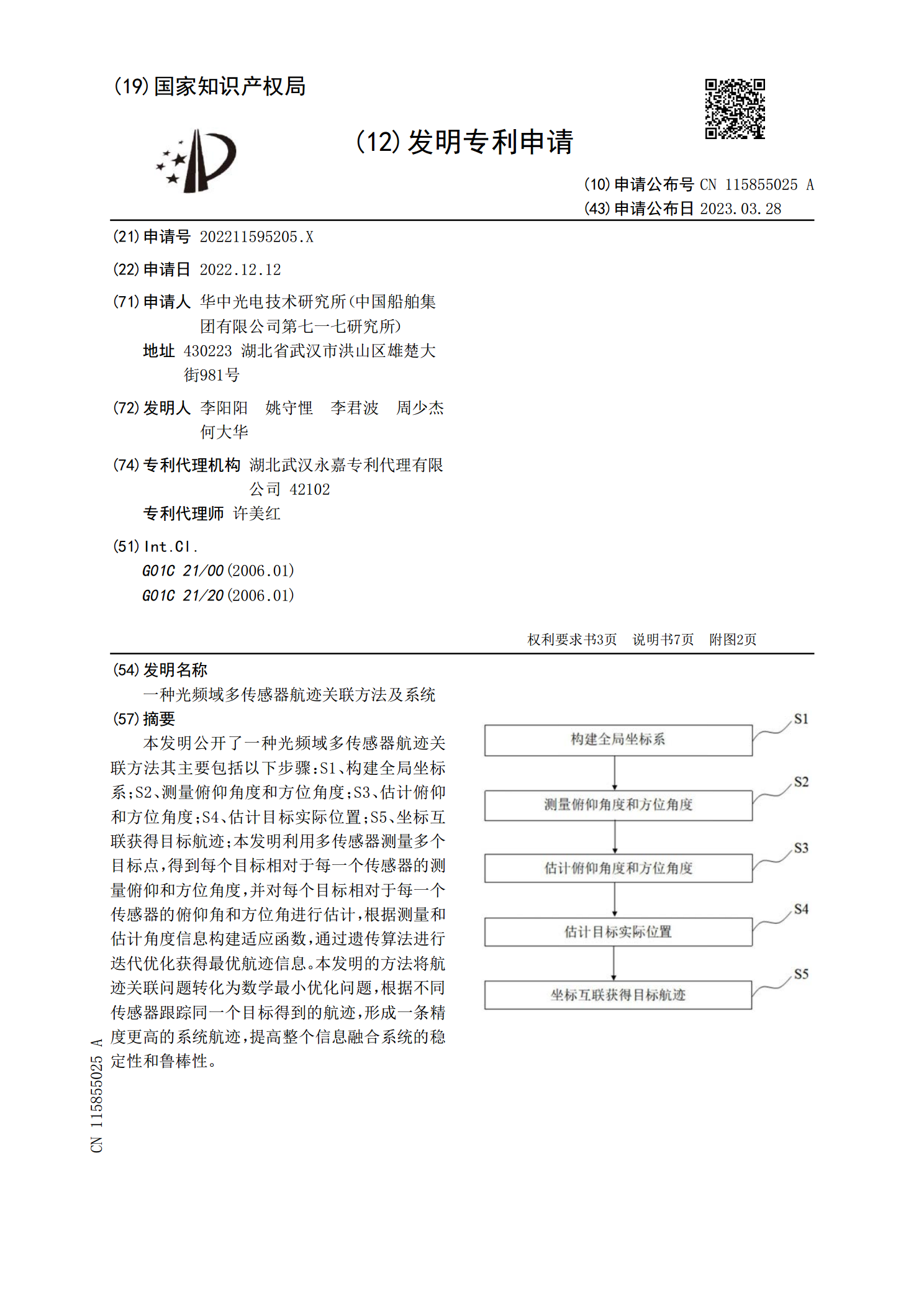
本发明公开了一种光频域多传感器航迹关联方法其主要包括以下步骤:S1、构建全局坐标系;S2、测量俯仰角度和方位角度;S3、估计俯仰和方位角度;S4、估计目标实际位置;S5、坐标互联获得目标航迹;本发明利用多传感器测量多个目标点,得到每个目标相对于每一个传感器的测量俯仰和方位角度,并对每个目标相对于每一个传感器的俯仰角和方位角进行估计,根据测量和估计角度信息构建适应函数,通过遗传算法进行迭代优化获得最优航迹信息。本发明的方法将航迹关联问题转化为数学最小优化问题,根据不同传感器跟踪同一个目标得到的航迹,形成一条
一种基于单路口多传感器的航迹融合方法及系统.pdf
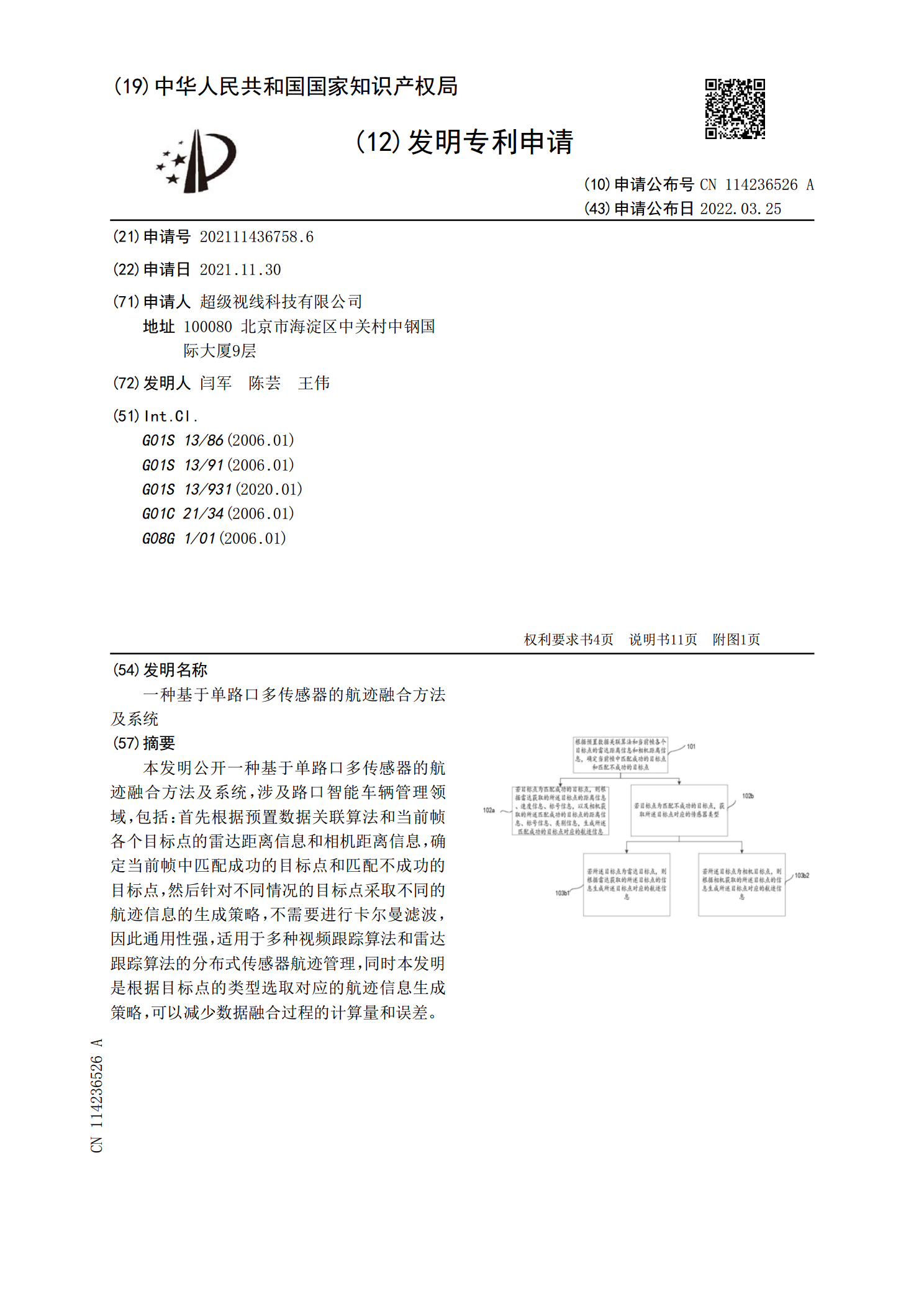
本发明公开一种基于单路口多传感器的航迹融合方法及系统,涉及路口智能车辆管理领域,包括:首先根据预置数据关联算法和当前帧各个目标点的雷达距离信息和相机距离信息,确定当前帧中匹配成功的目标点和匹配不成功的目标点,然后针对不同情况的目标点采取不同的航迹信息的生成策略,不需要进行卡尔曼滤波,因此通用性强,适用于多种视频跟踪算法和雷达跟踪算法的分布式传感器航迹管理,同时本发明是根据目标点的类型选取对应的航迹信息生成策略,可以减少数据融合过程的计算量和误差。

多传感器多目标航迹关联与融合算法研究.docx
分类号密级UDC注1学位论文多传感器多目标航迹关联与融合算法研究(题名和副题名)程跃兵(作者姓名)指导教师姓名戴跃伟教授闫玉德副教授

多传感器多目标航迹关联与融合算法研究.docx
分类号密级UDC注1学位论文多传感器多目标航迹关联与融合算法研究(题名和副题名)程跃兵(作者姓名)指导教师姓名戴跃伟教授闫玉德副教授申请学位级别硕士专业名称控制理论与控制工程论文提交日期2010.05论文答辩日期2010.06学位授予单位和日期南京理工大学答辩委员会主席评阅人年月日声明本学位论文是我在导师的指导下取得的研究成果,尽我所知,在本学位论文中,除了加以标注和致谢的部分外,不包含其他人已经发表或公布过的研究成果,也不包含我为获得任何教育机构的学位或学历而使用过的材料。与我一同工作的同事对本学位论文

一种无人集群多域探测数据航迹关联与预测方法.pdf
本发明公开了一种无人集群多域探测数据航迹关联与预测方法,该方法包括以下步骤:1)将当前时刻设定时间内对多探测源的探测数据进行融合获得当前时刻设定时间内目标点迹的点迹集合;2)将所有船的历史航迹列表中最新时刻的位置点迹取出形成航迹集合,将所有点迹集合中元素与航迹集合中不同元素匹配的解作为最优二分图匹配,航迹集合中元素和点迹集合元素间的实际距离作为二分图匹配的边权;3)根据步骤2)中的关联完成点迹融合与航迹融合,然后对目标移动产生的位置误差进行修正,获得最终的预测航迹。本发明方法基于二分图匹配和动量拟合,对各