
掘进机协同控制方法和系统.pdf

一吃****海逸


1/10
2/10

3/10

4/10

5/10

6/10

7/10
8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

掘进机协同控制方法和系统.pdf
本发明提供一种掘进机协同控制方法和系统,所述方法包括:根据掘进机的启动时间,得到第一个输送机的启动时间;根据所述第一个输送机的启动时间,得到每个目标输送机的延时启动时间,使所述每个目标输送机根据所述延时启动时间进行启动;获取每个输送机上的当前煤炭堆积值;根据所述当前煤炭堆积值,得到每个输送机的目标运行速度,使每个输送机根据所述目标运行速度进行运行;解决了现有技术的不能实现掘进设备的联动控制从而影响掘进工作开采效率的问题,通过后级输送机比前级输送机延迟启动和根据运煤量实时调整输送机运行速度,实现煤多快速、煤

掘进机控制方法及系统、可移动智能终端和掘进机.pdf
本公开提供一种掘进机控制方法及系统、可移动智能终端和掘进机,涉及矿山安全技术领域,能够解决现有的掘进机控制方式不够灵活、局限性较高的问题。具体技术方案为:判断可移动智能终端是否进入矿井设定的工作区域内;若是,则获取目标掘进机当前设置的工作模式,其中的目标掘进机与可移动智能终端通过专用5G网络通信,该工作模式包括本地模式、遥控模式或智能终端模式;当判断出可移动智能终端进入矿井设定的工作区域内且目标掘进机当前设置的工作模式为智能终端模式时,根据第一预设规则激活可移动智能终端中的掘进机智能控制功能;在掘进机智能

车队协同感知方法、车队协同控制方法和系统.pdf
本申请的实施方式提供了一种车队协同感知方法、车队协同控制方法和系统。该车队协同感知方法包括:单车融合处理器对相应车辆上的各个传感器采集的信息进行融合,得到相应车辆周围的障碍物信息;通信装置将相应车辆周围的障碍物信息发送给多车融合处理器;多车融合处理器对所述车队中的每个车辆周围的障碍物信息进行融合,得到所述车队周围的障碍物信息。本申请将车队中所有车辆的单车智能感知信息进行二次融合得到针对整个车队的障碍物信息,有利于整个做出车队的协同控制决策,提升了车队协同控制的精准度,不仅克服了单车智能感知存在感知盲区及感

云台和飞行器的协同控制方法和系统.pdf
一种云台(330)和飞行器(310)的协同控制方法和系统,云台(330)搭载于飞行器(310)上,该方法包括:获取飞行器(310)的欧拉角和云台(330)的关节角;当检测到飞行器(310)的欧拉角中对应第一方向的角度达到第一预设角度时,控制飞行器(310)的欧拉角的增加速度不大于第一预设速度;当检测到云台(330)的关节角中对应第一方向的角度达到第二预设角度时,根据第一预设规避参数控制云台(330)在第一方向上与飞行器(310)同向转动,第一预设规避参数与飞行器(310)的欧拉角的增加速度相关。在云台(3
基于云边协同控制的CPSS系统、调控方法和应用.pdf
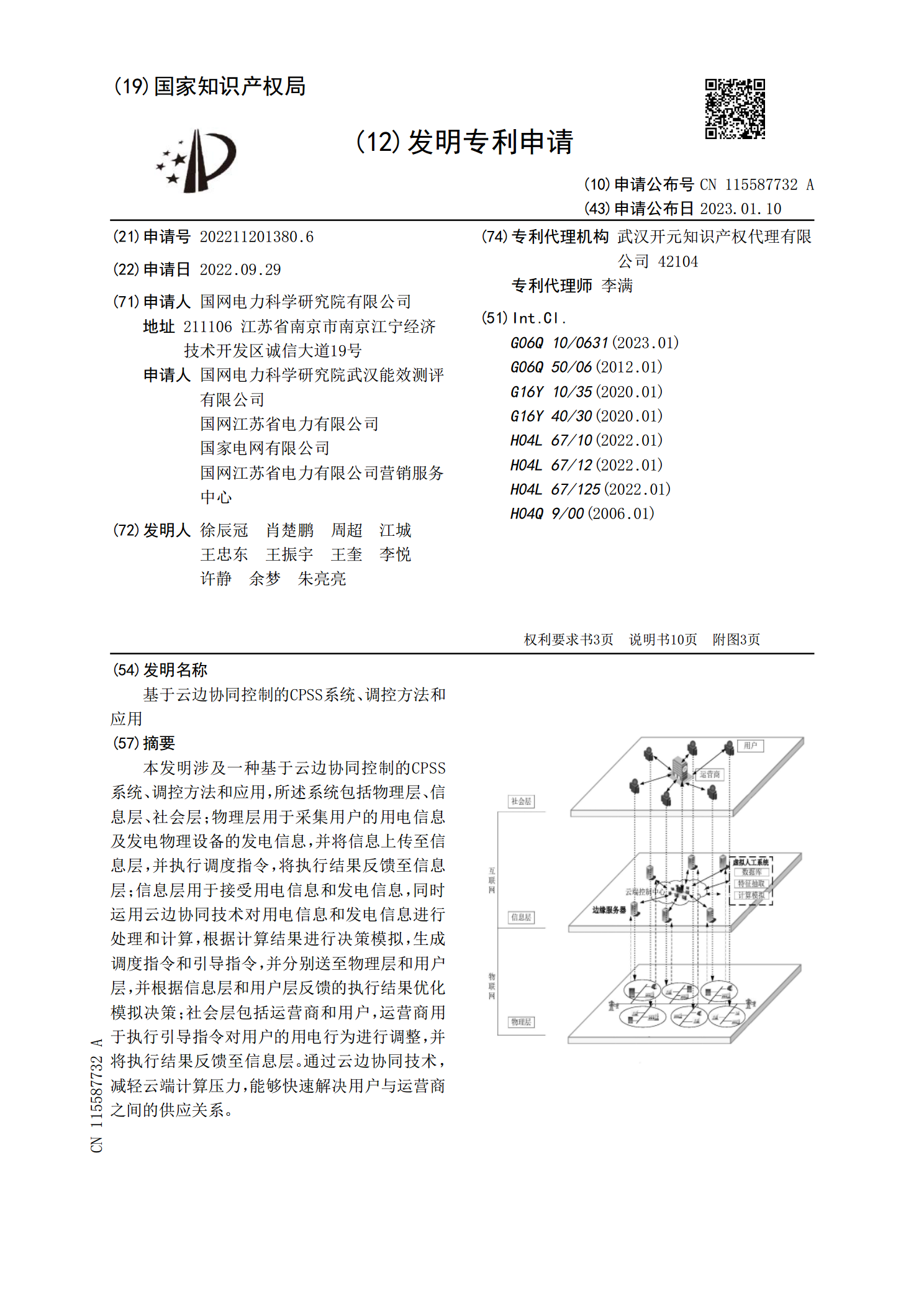
本发明涉及一种基于云边协同控制的CPSS系统、调控方法和应用,所述系统包括物理层、信息层、社会层;物理层用于采集用户的用电信息及发电物理设备的发电信息,并将信息上传至信息层,并执行调度指令,将执行结果反馈至信息层;信息层用于接受用电信息和发电信息,同时运用云边协同技术对用电信息和发电信息进行处理和计算,根据计算结果进行决策模拟,生成调度指令和引导指令,并分别送至物理层和用户层,并根据信息层和用户层反馈的执行结果优化模拟决策;社会层包括运营商和用户,运营商用于执行引导指令对用户的用电行为进行调整,并将执行结