
云台和飞行器的协同控制方法和系统.pdf

fu****级甜


1/1
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

云台和飞行器的协同控制方法和系统.pdf
一种云台(330)和飞行器(310)的协同控制方法和系统,云台(330)搭载于飞行器(310)上,该方法包括:获取飞行器(310)的欧拉角和云台(330)的关节角;当检测到飞行器(310)的欧拉角中对应第一方向的角度达到第一预设角度时,控制飞行器(310)的欧拉角的增加速度不大于第一预设速度;当检测到云台(330)的关节角中对应第一方向的角度达到第二预设角度时,根据第一预设规避参数控制云台(330)在第一方向上与飞行器(310)同向转动,第一预设规避参数与飞行器(310)的欧拉角的增加速度相关。在云台(3
基于云边协同控制的CPSS系统、调控方法和应用.pdf
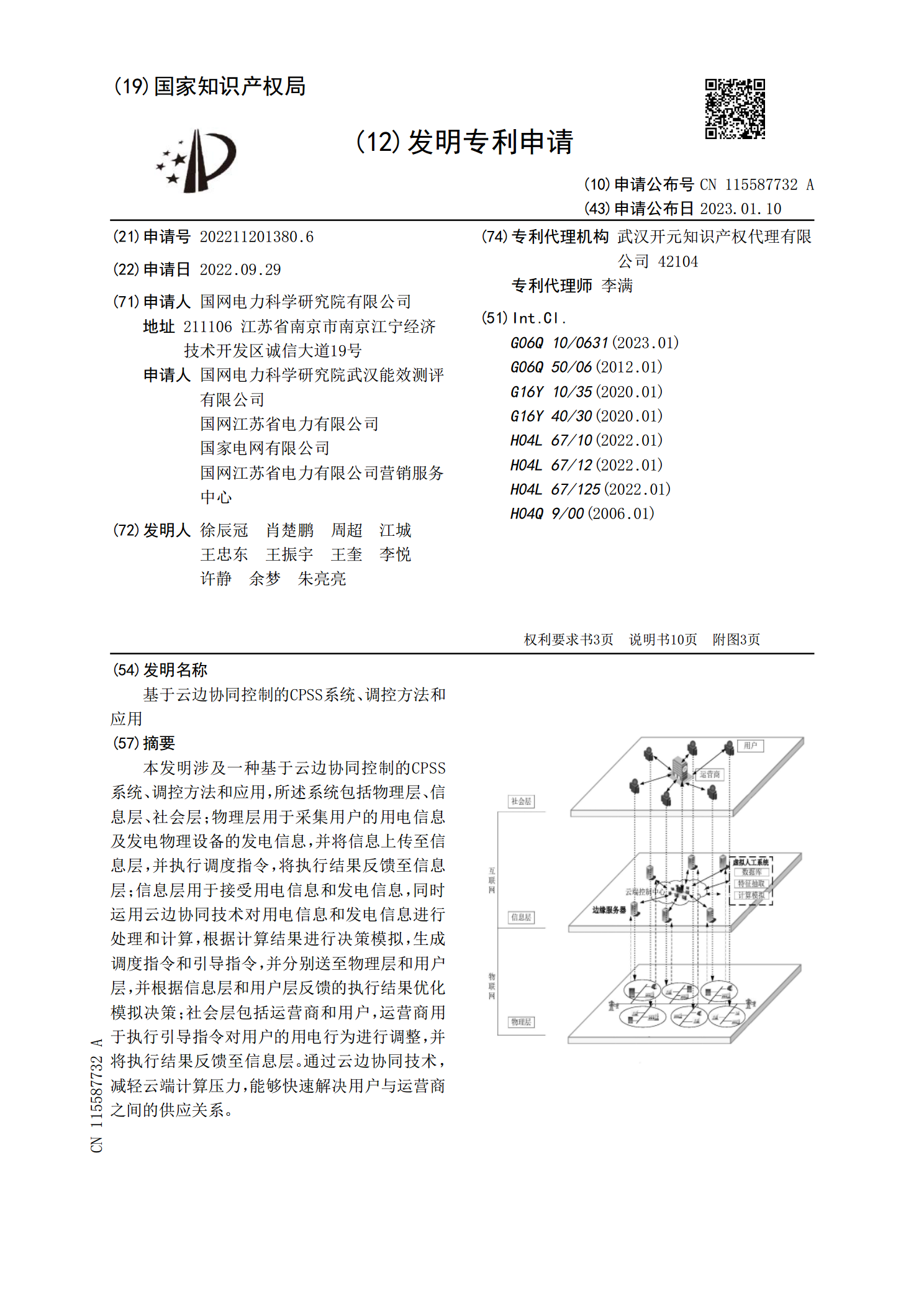
本发明涉及一种基于云边协同控制的CPSS系统、调控方法和应用,所述系统包括物理层、信息层、社会层;物理层用于采集用户的用电信息及发电物理设备的发电信息,并将信息上传至信息层,并执行调度指令,将执行结果反馈至信息层;信息层用于接受用电信息和发电信息,同时运用云边协同技术对用电信息和发电信息进行处理和计算,根据计算结果进行决策模拟,生成调度指令和引导指令,并分别送至物理层和用户层,并根据信息层和用户层反馈的执行结果优化模拟决策;社会层包括运营商和用户,运营商用于执行引导指令对用户的用电行为进行调整,并将执行结
云台的控制方法、控制器和云台.pdf
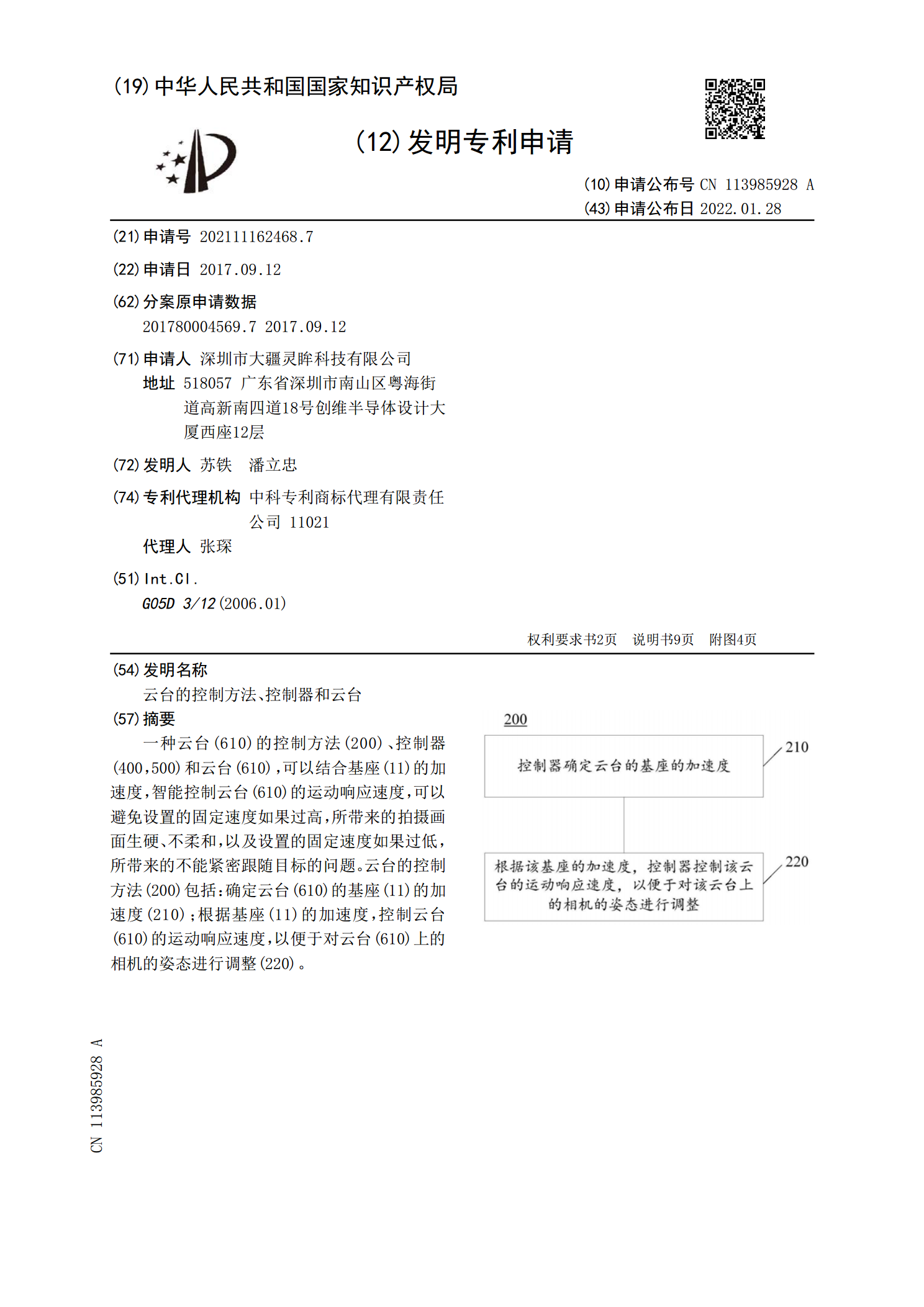
一种云台(610)的控制方法(200)、控制器(400,500)和云台(610),可以结合基座(11)的加速度,智能控制云台(610)的运动响应速度,可以避免设置的固定速度如果过高,所带来的拍摄画面生硬、不柔和,以及设置的固定速度如果过低,所带来的不能紧密跟随目标的问题。云台的控制方法(200)包括:确定云台(610)的基座(11)的加速度(210);根据基座(11)的加速度,控制云台(610)的运动响应速度,以便于对云台(610)上的相机的姿态进行调整(220)。
云台的控制方法、云台及无人飞行器.pdf
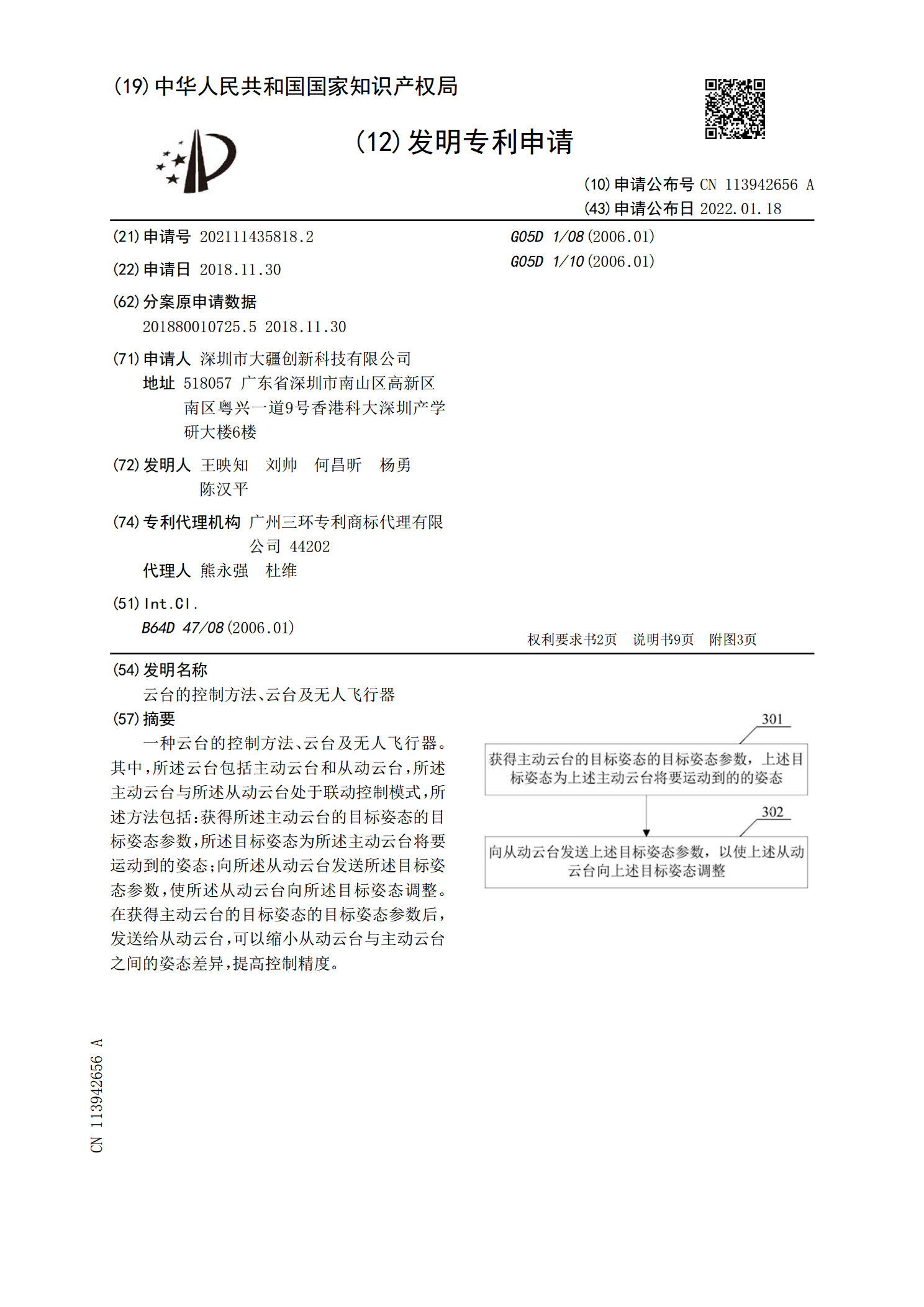
一种云台的控制方法、云台及无人飞行器。其中,所述云台包括主动云台和从动云台,所述主动云台与所述从动云台处于联动控制模式,所述方法包括:获得所述主动云台的目标姿态的目标姿态参数,所述目标姿态为所述主动云台将要运动到的姿态;向所述从动云台发送所述目标姿态参数,使所述从动云台向所述目标姿态调整。在获得主动云台的目标姿态的目标姿态参数后,发送给从动云台,可以缩小从动云台与主动云台之间的姿态差异,提高控制精度。
车路云协同感知的方法和系统.pdf
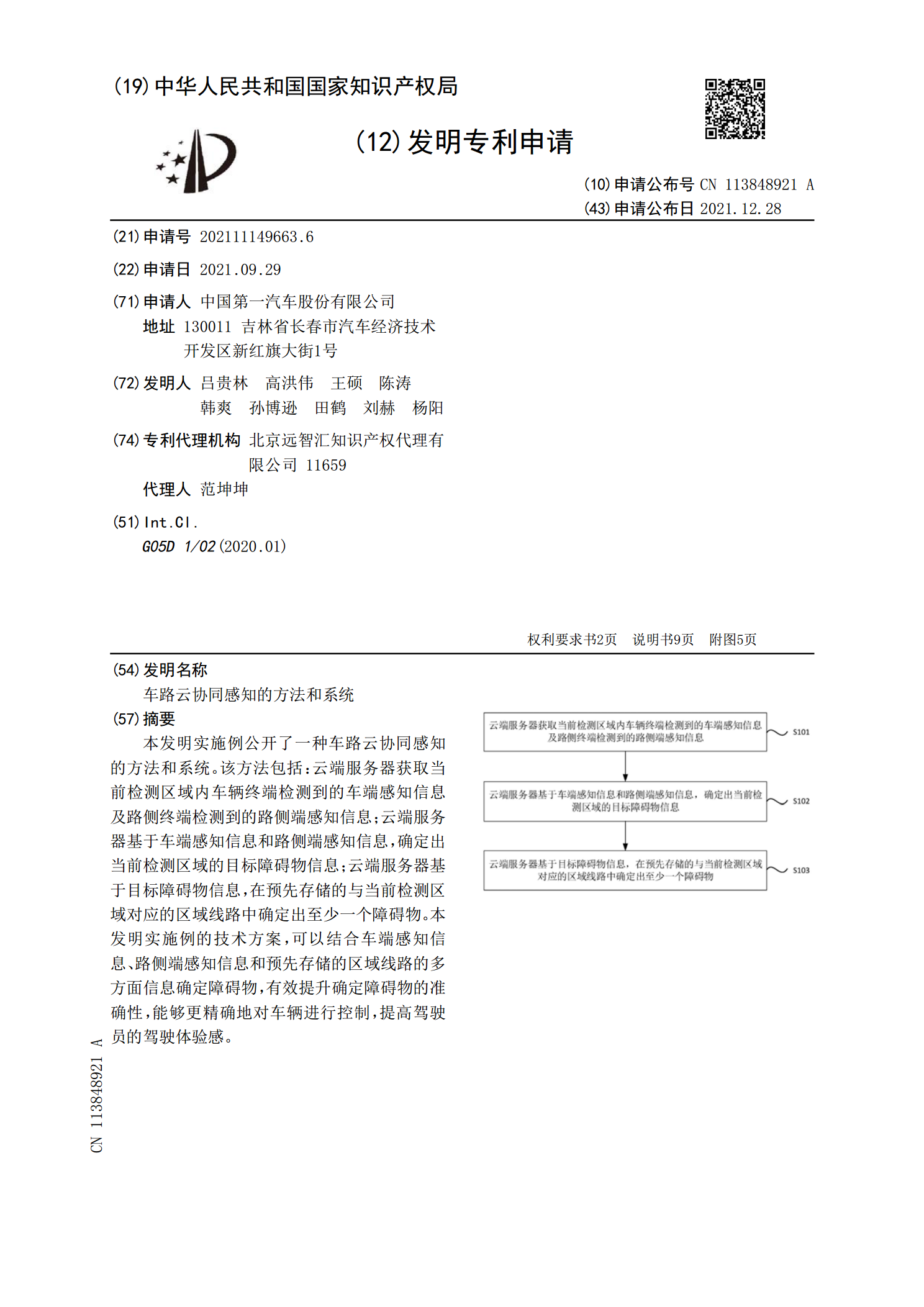
本发明实施例公开了一种车路云协同感知的方法和系统。该方法包括:云端服务器获取当前检测区域内车辆终端检测到的车端感知信息及路侧终端检测到的路侧端感知信息;云端服务器基于车端感知信息和路侧端感知信息,确定出当前检测区域的目标障碍物信息;云端服务器基于目标障碍物信息,在预先存储的与当前检测区域对应的区域线路中确定出至少一个障碍物。本发明实施例的技术方案,可以结合车端感知信息、路侧端感知信息和预先存储的区域线路的多方面信息确定障碍物,有效提升确定障碍物的准确性,能够更精确地对车辆进行控制,提高驾驶员的驾驶体验感。