
车队协同感知方法、车队协同控制方法和系统.pdf

雨巷****凝海


1/10

2/10

3/10
4/10

5/10
6/10

7/10

8/10
9/10

10/10
亲,该文档总共17页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

车队协同感知方法、车队协同控制方法和系统.pdf
本申请的实施方式提供了一种车队协同感知方法、车队协同控制方法和系统。该车队协同感知方法包括:单车融合处理器对相应车辆上的各个传感器采集的信息进行融合,得到相应车辆周围的障碍物信息;通信装置将相应车辆周围的障碍物信息发送给多车融合处理器;多车融合处理器对所述车队中的每个车辆周围的障碍物信息进行融合,得到所述车队周围的障碍物信息。本申请将车队中所有车辆的单车智能感知信息进行二次融合得到针对整个车队的障碍物信息,有利于整个做出车队的协同控制决策,提升了车队协同控制的精准度,不仅克服了单车智能感知存在感知盲区及感

以节能为导向的多车队列系统稳定协同控制方法及装置.pdf
本发明公开了一种以节能为导向的多车队列系统稳定协同控制方法及装置,该方法包括:1)被控车辆采取领航车、相邻车、自身的实时状态信息;2)根据收集到的轮毂电机的能量效率和道路信息,建立能量最优速度规划问题,通过动态规划方法求解该问题获得能量最优速度;3)收集队列中各跟随车能量最优速度后,建立一种能量最优车间距策略,控制队列在该车间距策略下行驶;4)根据能量最优车间距策略,通过运用队列稳定鲁棒协同控制算法实现队列系统稳定。本发明控制方法设计了一种新型的能量最优车间距策略,可以实现各跟随车车速在空间上的一致,突破
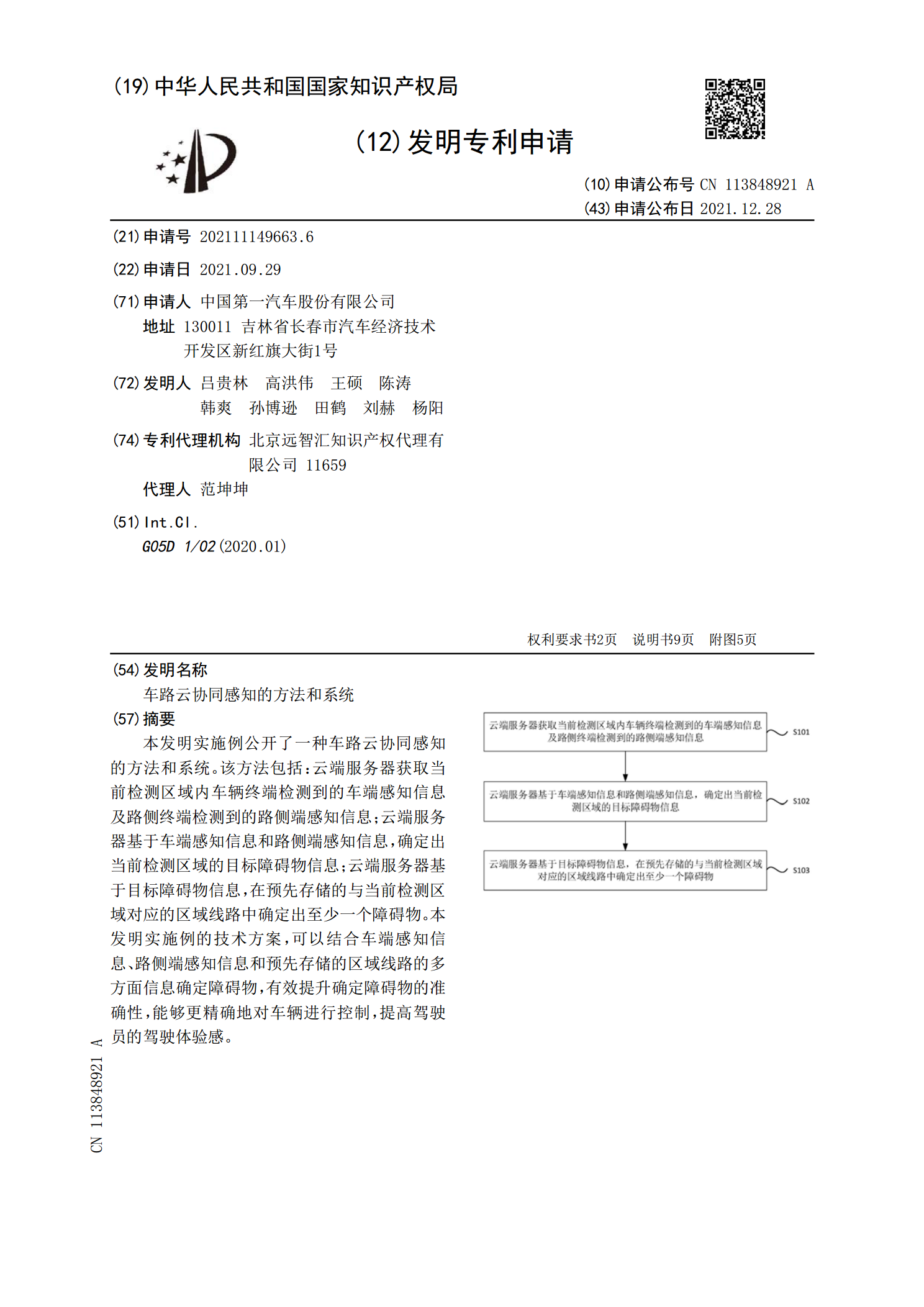
车路云协同感知的方法和系统.pdf
本发明实施例公开了一种车路云协同感知的方法和系统。该方法包括:云端服务器获取当前检测区域内车辆终端检测到的车端感知信息及路侧终端检测到的路侧端感知信息;云端服务器基于车端感知信息和路侧端感知信息,确定出当前检测区域的目标障碍物信息;云端服务器基于目标障碍物信息,在预先存储的与当前检测区域对应的区域线路中确定出至少一个障碍物。本发明实施例的技术方案,可以结合车端感知信息、路侧端感知信息和预先存储的区域线路的多方面信息确定障碍物,有效提升确定障碍物的准确性,能够更精确地对车辆进行控制,提高驾驶员的驾驶体验感。

协同感知方法和装置.pdf
本申请公开了一种协同感知方法和装置。该方法包括接收停车场内每个感知终端感知的障碍物信息;对接收的全部所述障碍物信息进行融合,形成全场障碍物感知信息;根据指定车辆的当前位置在全场障碍物感知信息中搜索指定车辆周围的障碍物信息;当搜索到所述指定车辆周围存在障碍物时,将搜索结果向所述指定车辆广播。本申请解决了相关技术中自动驾驶车辆在停车场内盲区感知能力差的技术问题。

用于车队共享的系统和方法.pdf
本公开的技术大体涉及用于队列之间共享车辆的方法和系统。车辆共享服务通常在周末期间使用最多。因此,通过车辆共享服务来使用的许多车辆在工作日期间闲置。同时,车辆租赁公司在工作日期间需求最多并且他们的车辆在工作日时未充分利用。本公开的技术,在某些实施例中,提供了用于在车辆共享实体和车辆租赁实体之间共享车辆的系统和方法。这可使这些实体降低队列成本并且在一个实体预期有需求高峰时通过队列之间流动车辆来获得更好的队列利用率。例如,车辆共享服务的利用租赁车辆代理的过剩周末库存的能力将允许他们满足自身强劲的周末需求,而不需