
车辆自动驾驶的转向角度控制方法和系统.pdf

是飞****文章


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共15页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

车辆自动驾驶的转向角度控制方法和系统.pdf
本发明提供一种车辆自动驾驶的转向角度控制方法和系统,方法包括:基于控制器的请求转向角度和车辆当前角度的偏差,角度PID控制闭环计算出目标转速;基于目标转速和车辆转向系统的电机当前转速的偏差,转速PID控制闭环计算出第一扭矩值;前馈控制模块将目标转速与电机当前状态相对比,计算出第二扭矩值;第一扭矩值和第二扭矩值的和,经滤波计算出第三扭矩值;第一扭矩值、第二扭矩值和第三扭矩值求和后得到输出扭矩值,电机基于输出扭矩值操控车辆转向。通过角度和角速度的两级PID控制结合前馈控制模块进行前馈补偿,借助滤波计算相辅助,
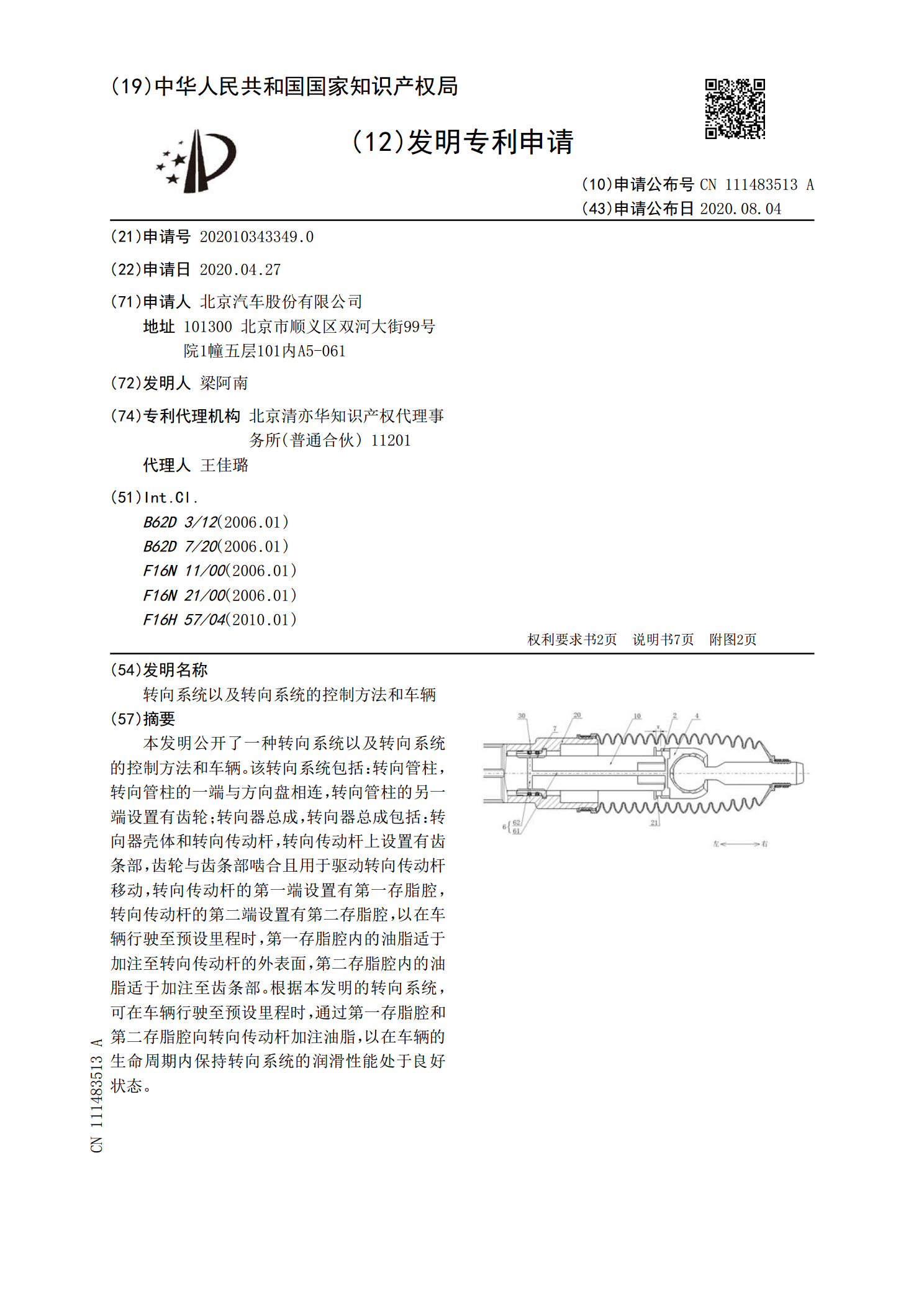
转向系统以及转向系统的控制方法和车辆.pdf
本发明公开了一种转向系统以及转向系统的控制方法和车辆。该转向系统包括:转向管柱,转向管柱的一端与方向盘相连,转向管柱的另一端设置有齿轮;转向器总成,转向器总成包括:转向器壳体和转向传动杆,转向传动杆上设置有齿条部,齿轮与齿条部啮合且用于驱动转向传动杆移动,转向传动杆的第一端设置有第一存脂腔,转向传动杆的第二端设置有第二存脂腔,以在车辆行驶至预设里程时,第一存脂腔内的油脂适于加注至转向传动杆的外表面,第二存脂腔内的油脂适于加注至齿条部。根据本发明的转向系统,可在车辆行驶至预设里程时,通过第一存脂腔和第二存脂
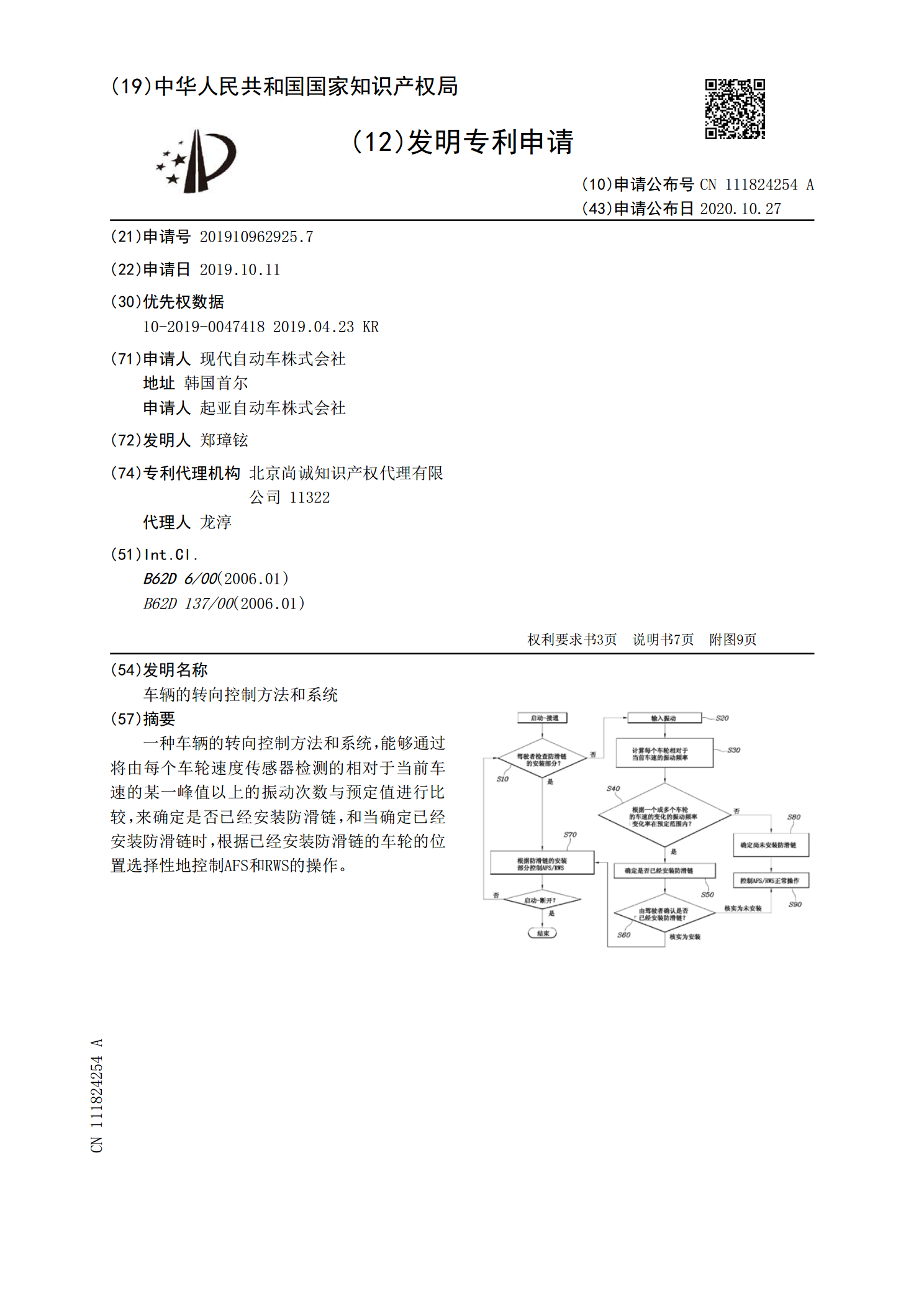
车辆的转向控制方法和系统.pdf
一种车辆的转向控制方法和系统,能够通过将由每个车轮速度传感器检测的相对于当前车速的某一峰值以上的振动次数与预定值进行比较,来确定是否已经安装防滑链,和当确定已经安装防滑链时,根据已经安装防滑链的车轮的位置选择性地控制AFS和RWS的操作。

用于自动驾驶机动车辆的转向角度控制装置.pdf
本发明涉及一种用于控制机动车辆的转向角度的装置(1),该装置包括侧向控制器(14),该侧向控制器适合于向车辆转向系统(15)的至少一个致动器输出命令,该致动器通过该车辆方向盘的旋转角度作用于这些车辆导向车轮的转向角度,以在自动驾驶模式下遵循轨迹,该装置的特征在于,该装置进一步包括轨迹遵循分析模块(11),该轨迹遵循分析模块能够检测没有纵向坡度和没有侧向倾斜度的道路条件,并且当检测到这样的道路条件时,能够将当前车辆导向车轮转向角度误差值输出到自动方向盘角度偏差补偿模块(16),该自动方向盘角度偏差补偿模块链
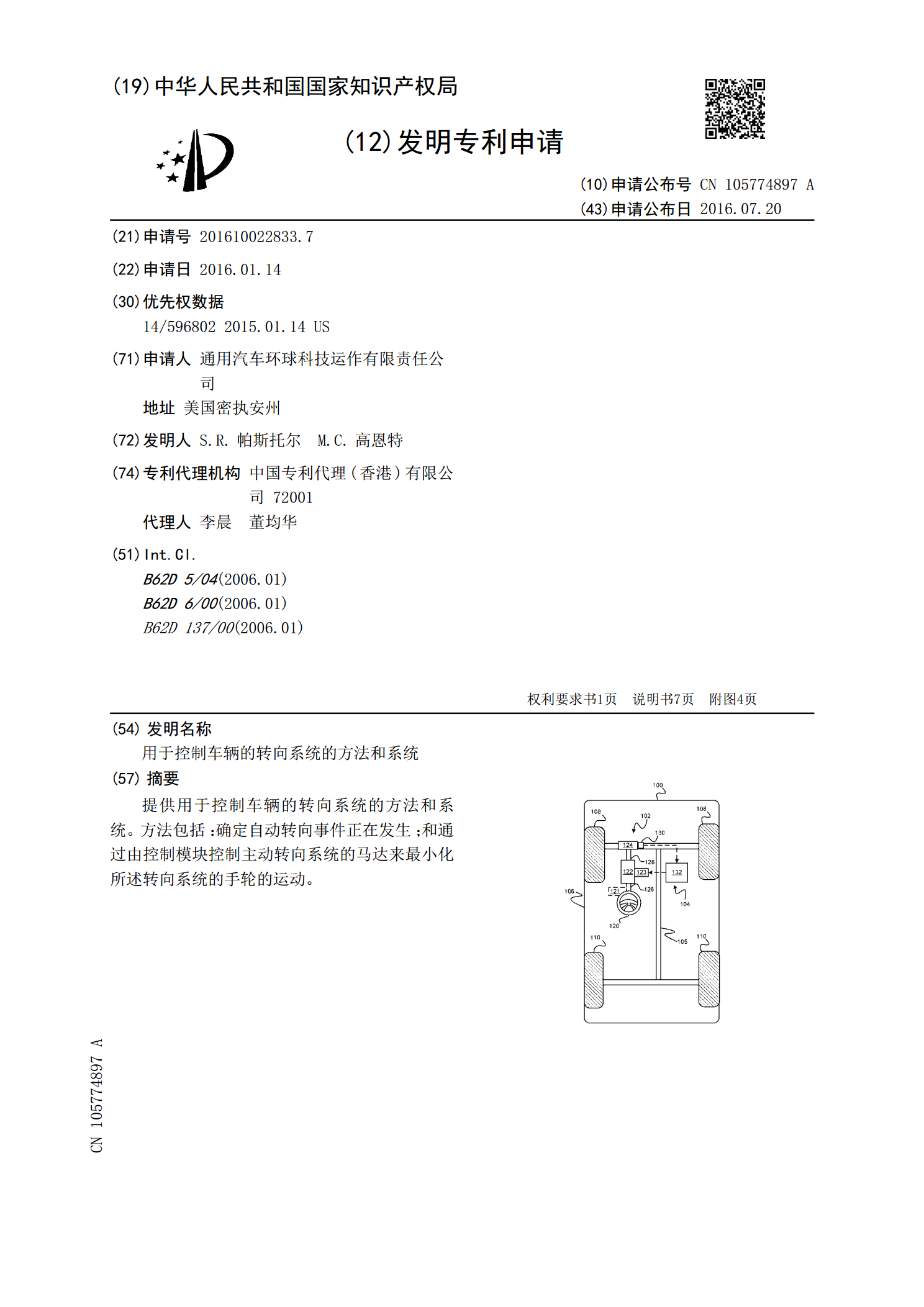
用于控制车辆的转向系统的方法和系统.pdf
提供用于控制车辆的转向系统的方法和系统。方法包括:确定自动转向事件正在发生;和通过由控制模块控制主动转向系统的马达来最小化所述转向系统的手轮的运动。