
目标轨迹离散化方法、泊车路径跟踪误差优化方法及系统.pdf

是向****23

1/10

2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料
目标轨迹离散化方法、泊车路径跟踪误差优化方法及系统.pdf
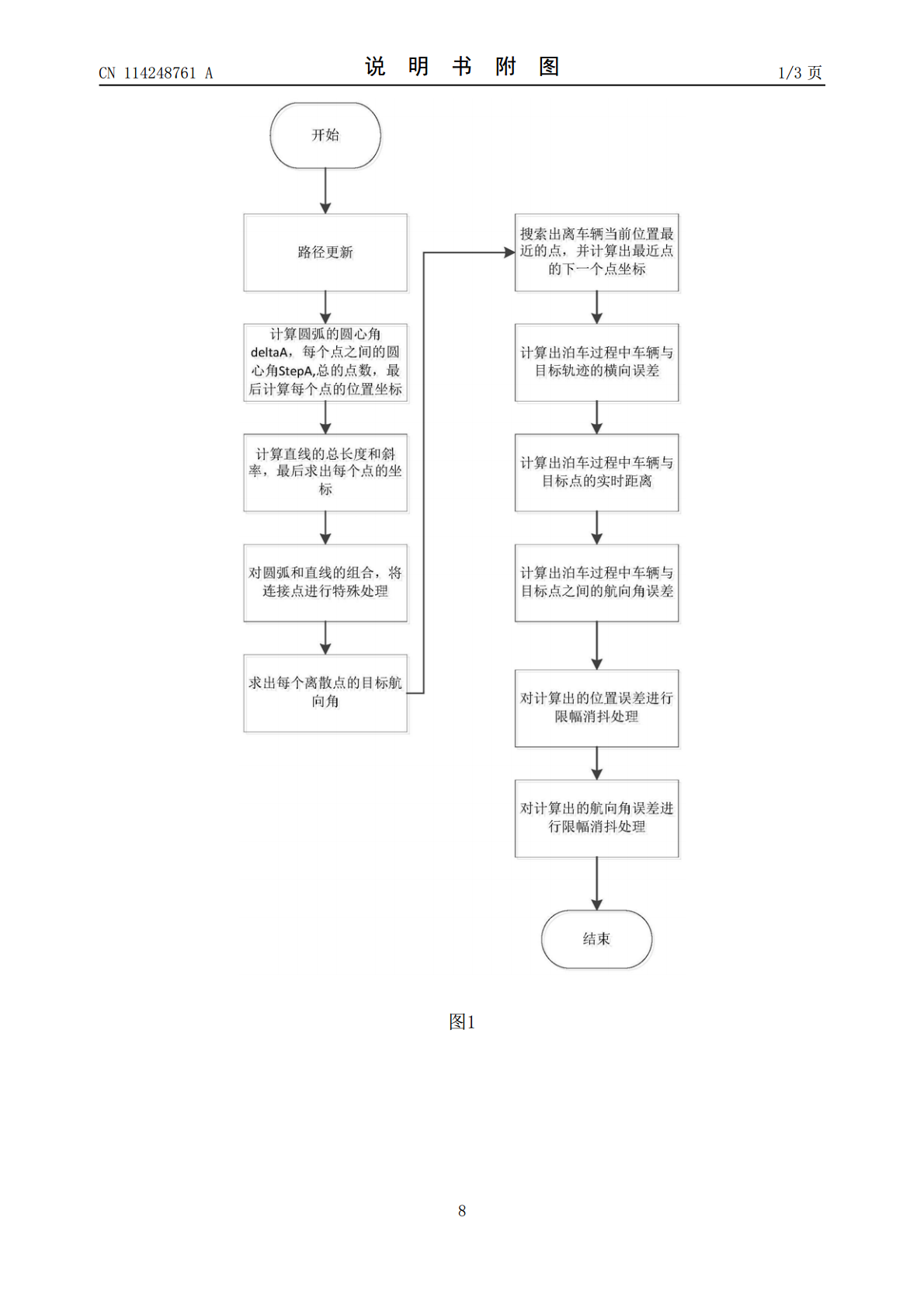
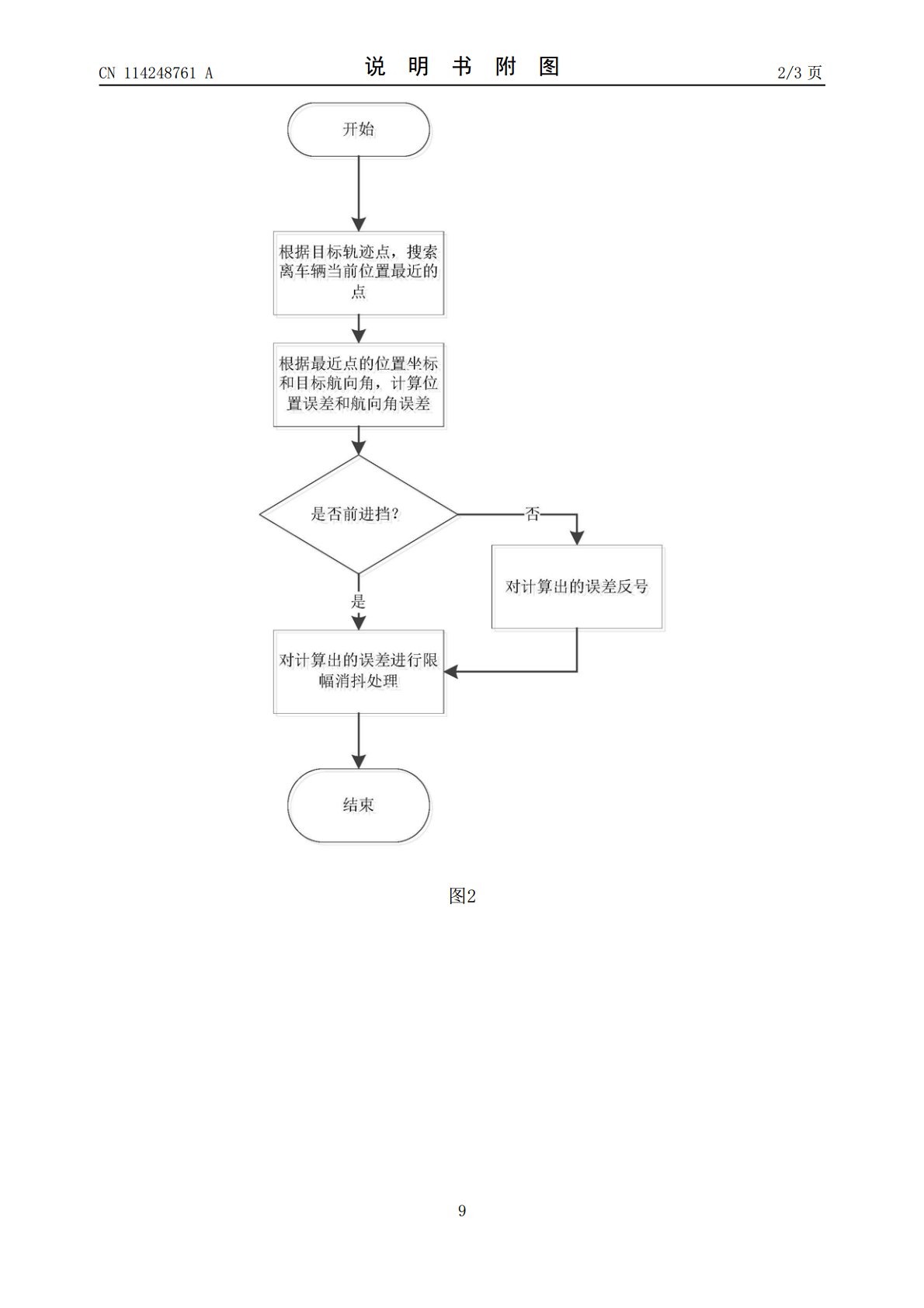
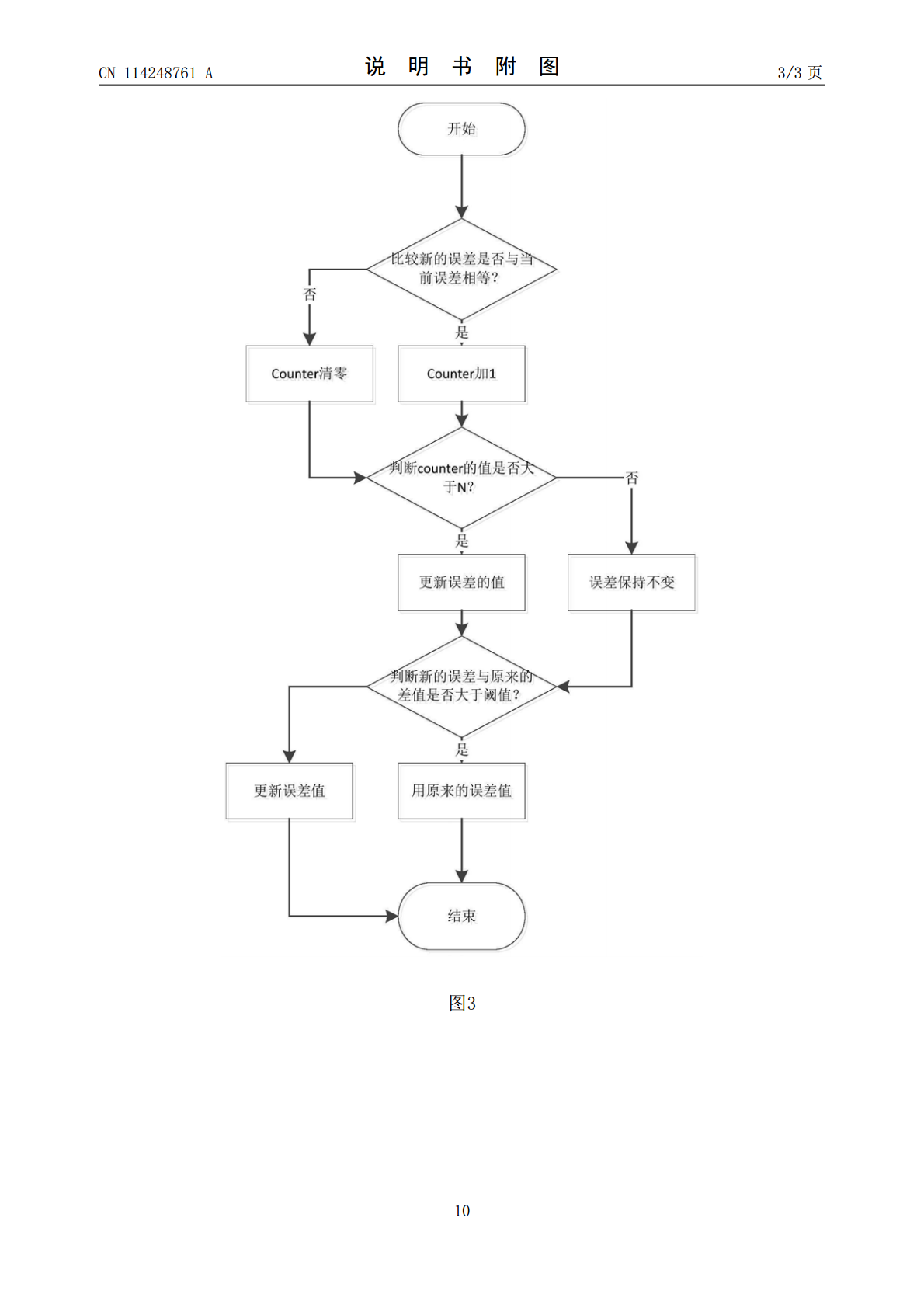
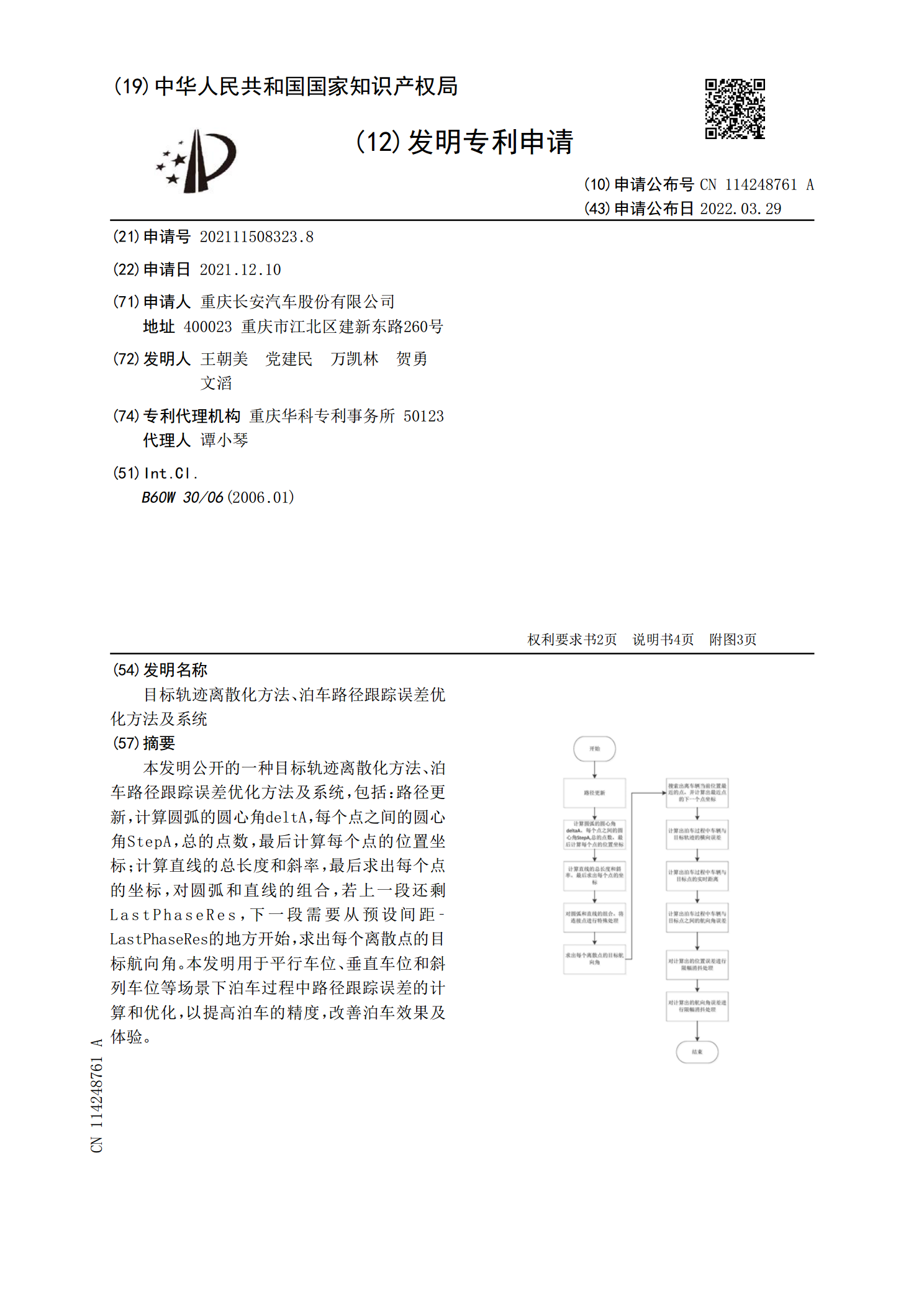
本发明公开的一种目标轨迹离散化方法、泊车路径跟踪误差优化方法及系统,包括:路径更新,计算圆弧的圆心角deltA,每个点之间的圆心角StepA,总的点数,最后计算每个点的位置坐标;计算直线的总长度和斜率,最后求出每个点的坐标,对圆弧和直线的组合,若上一段还剩LastPhaseRes,下一段需要从预设间距‑LastPhaseRes的地方开始,求出每个离散点的目标航向角。本发明用于平行车位、垂直车位和斜列车位等场景下泊车过程中路径跟踪误差的计算和优化,以提高泊车的精度,改善泊车效果及体验。
减小自动泊车路径误差方法及系统.pdf
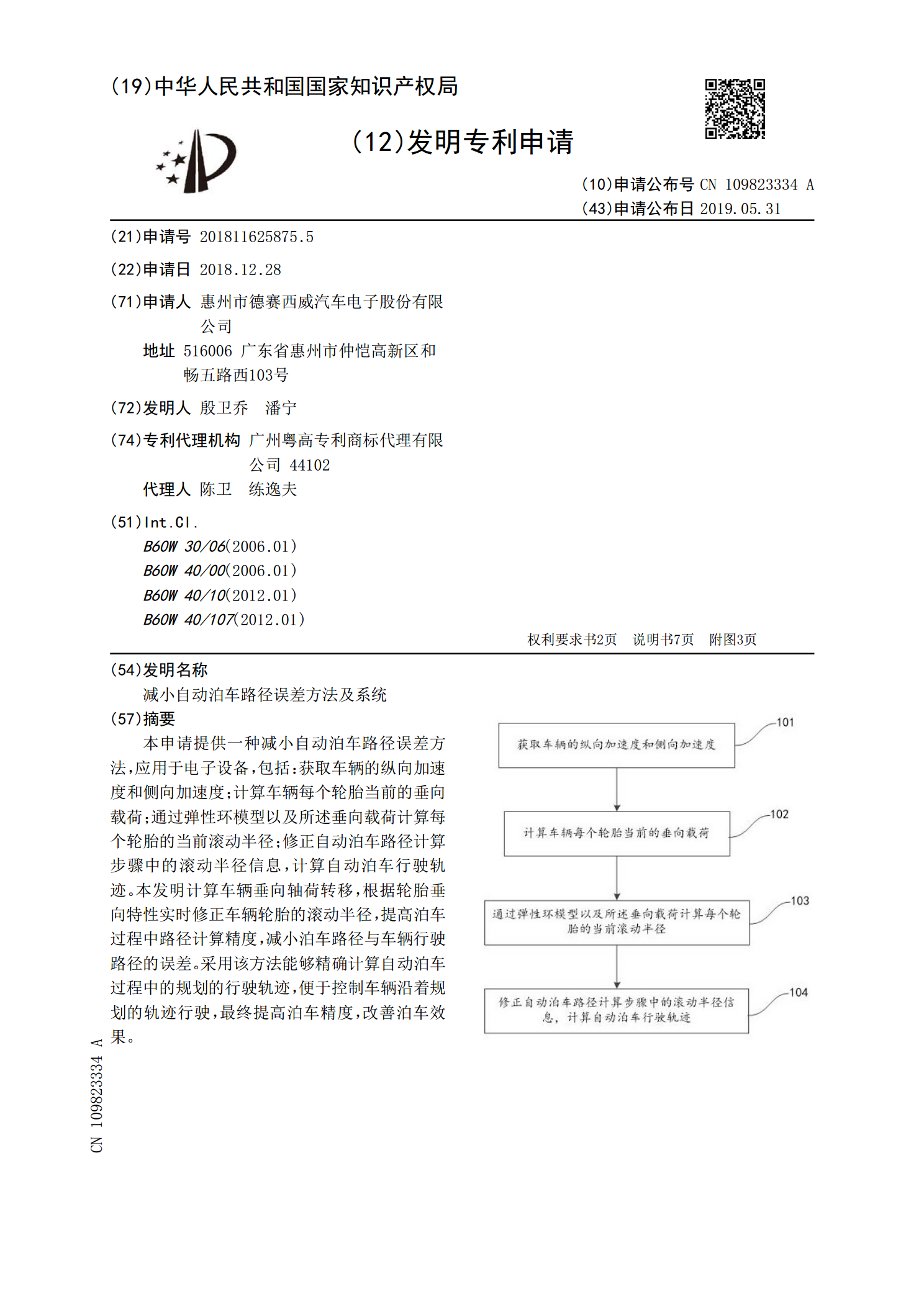
本申请提供一种减小自动泊车路径误差方法,应用于电子设备,包括:获取车辆的纵向加速度和侧向加速度;计算车辆每个轮胎当前的垂向载荷;通过弹性环模型以及所述垂向载荷计算每个轮胎的当前滚动半径;修正自动泊车路径计算步骤中的滚动半径信息,计算自动泊车行驶轨迹。本发明计算车辆垂向轴荷转移,根据轮胎垂向特性实时修正车辆轮胎的滚动半径,提高泊车过程中路径计算精度,减小泊车路径与车辆行驶路径的误差。采用该方法能够精确计算自动泊车过程中的规划的行驶轨迹,便于控制车辆沿着规划的轨迹行驶,最终提高泊车精度,改善泊车效果。
驾驶轨迹优化方法及优化系统.pdf
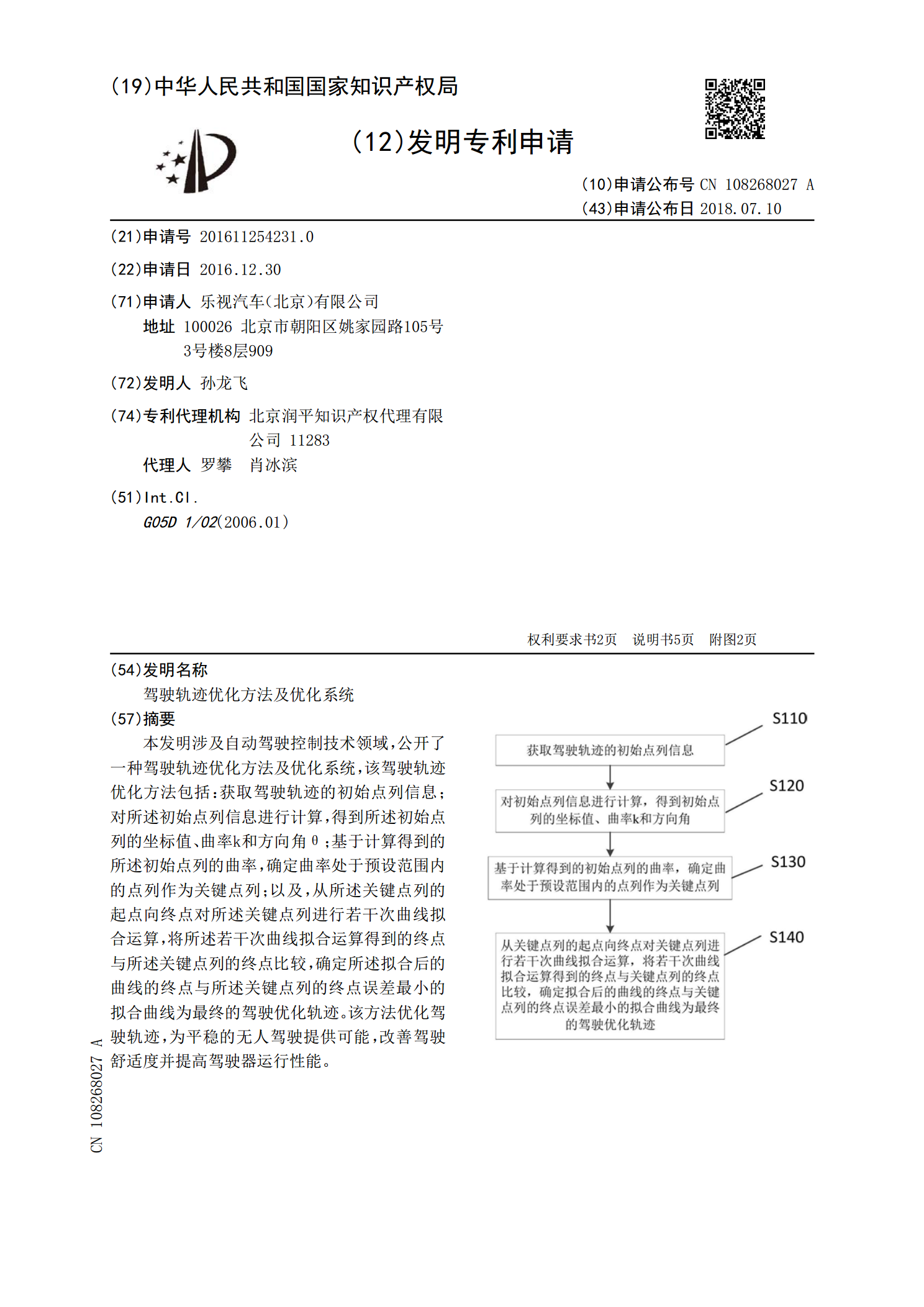
本发明涉及自动驾驶控制技术领域,公开了一种驾驶轨迹优化方法及优化系统,该驾驶轨迹优化方法包括:获取驾驶轨迹的初始点列信息;对所述初始点列信息进行计算,得到所述初始点列的坐标值、曲率k和方向角θ;基于计算得到的所述初始点列的曲率,确定曲率处于预设范围内的点列作为关键点列;以及,从所述关键点列的起点向终点对所述关键点列进行若干次曲线拟合运算,将所述若干次曲线拟合运算得到的终点与所述关键点列的终点比较,确定所述拟合后的曲线的终点与所述关键点列的终点误差最小的拟合曲线为最终的驾驶优化轨迹。该方法优化驾驶轨迹,为平
AGV系统的轨迹跟踪控制方法.pdf
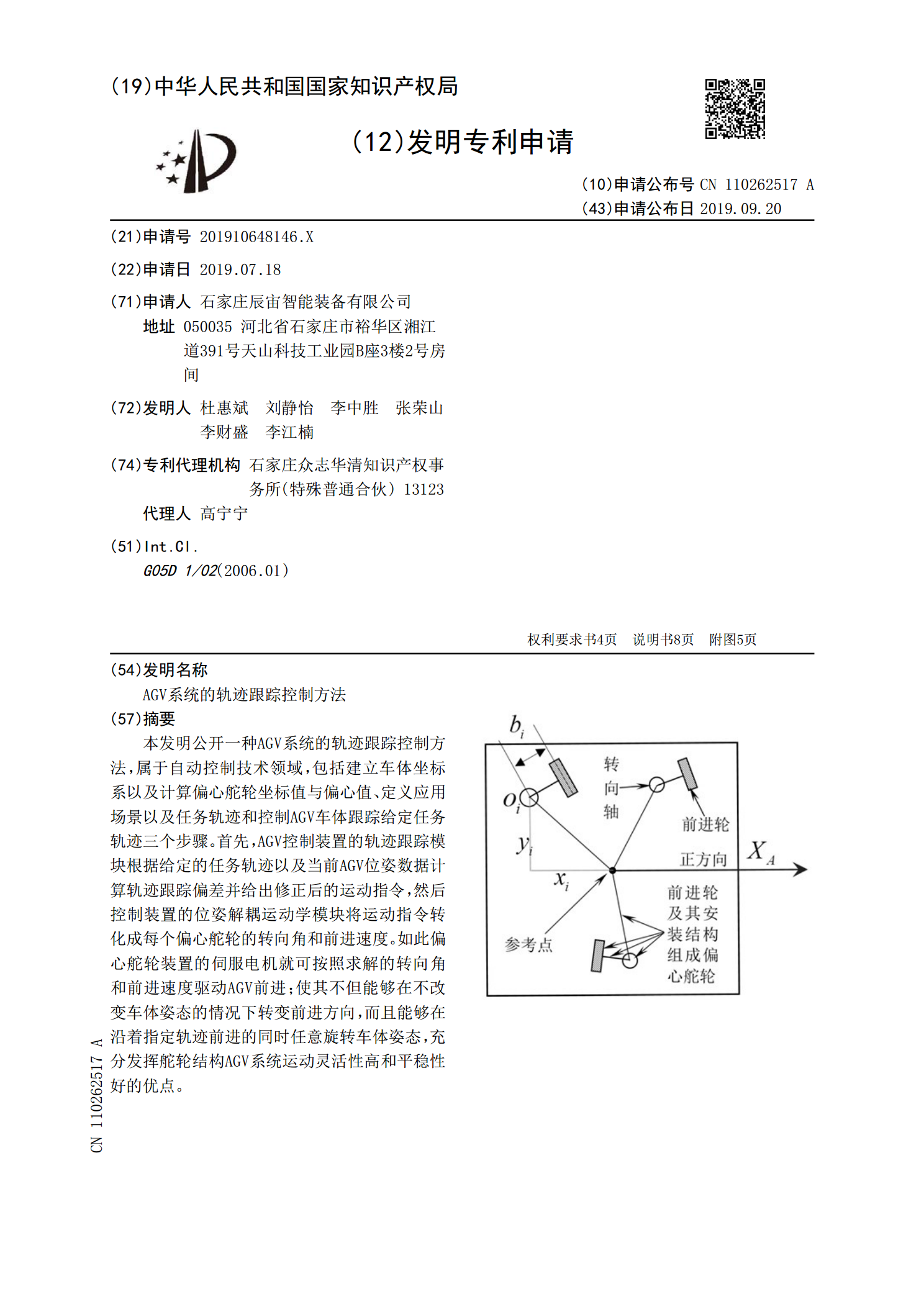
本发明公开一种AGV系统的轨迹跟踪控制方法,属于自动控制技术领域,包括建立车体坐标系以及计算偏心舵轮坐标值与偏心值、定义应用场景以及任务轨迹和控制AGV车体跟踪给定任务轨迹三个步骤。首先,AGV控制装置的轨迹跟踪模块根据给定的任务轨迹以及当前AGV位姿数据计算轨迹跟踪偏差并给出修正后的运动指令,然后控制装置的位姿解耦运动学模块将运动指令转化成每个偏心舵轮的转向角和前进速度。如此偏心舵轮装置的伺服电机就可按照求解的转向角和前进速度驱动AGV前进;使其不但能够在不改变车体姿态的情况下转变前进方向,而且能够在沿
一种自动泊车路径规划的避障方法及泊车路径规划系统.pdf
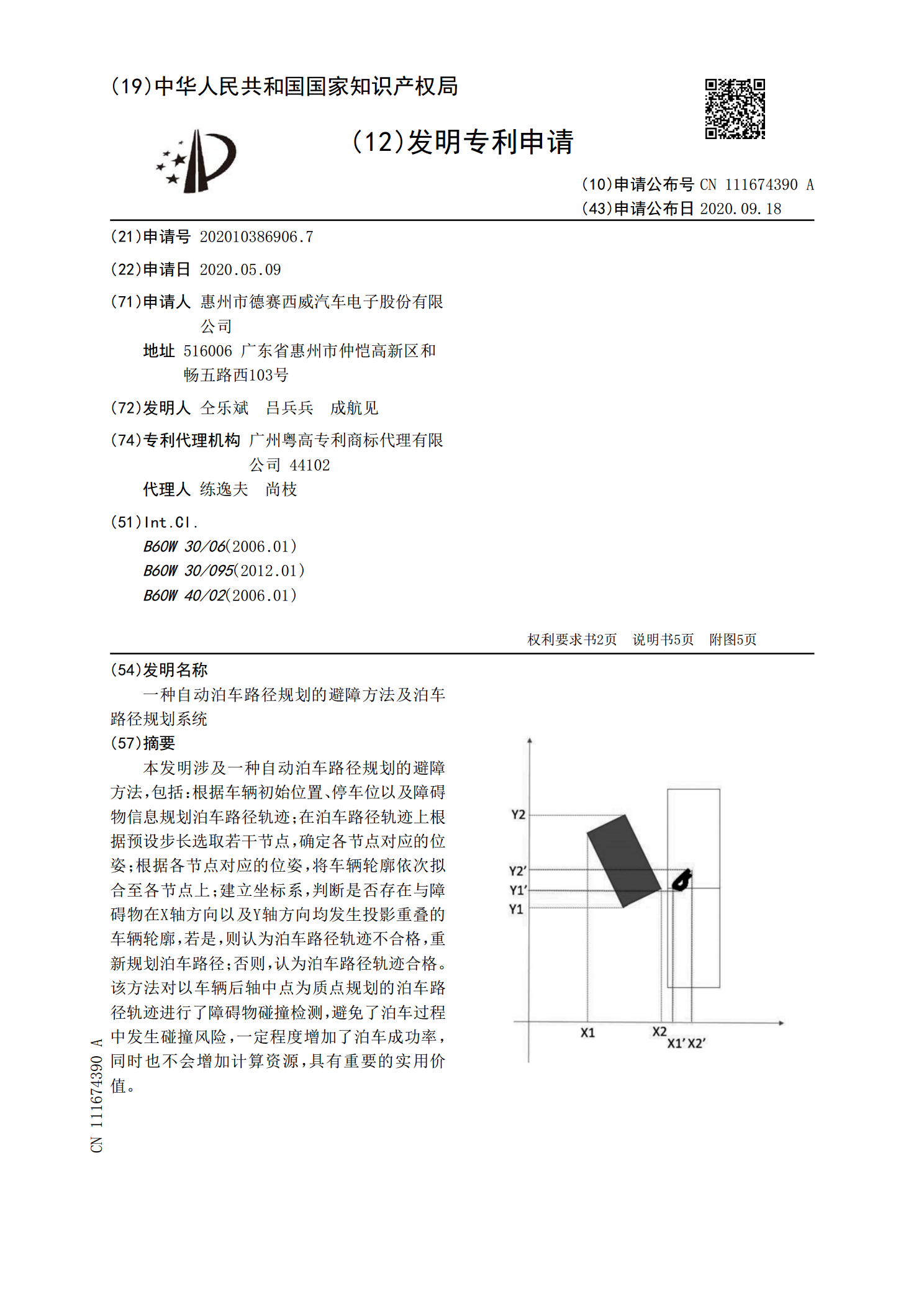
本发明涉及一种自动泊车路径规划的避障方法,包括:根据车辆初始位置、停车位以及障碍物信息规划泊车路径轨迹;在泊车路径轨迹上根据预设步长选取若干节点,确定各节点对应的位姿;根据各节点对应的位姿,将车辆轮廓依次拟合至各节点上;建立坐标系,判断是否存在与障碍物在X轴方向以及Y轴方向均发生投影重叠的车辆轮廓,若是,则认为泊车路径轨迹不合格,重新规划泊车路径;否则,认为泊车路径轨迹合格。该方法对以车辆后轴中点为质点规划的泊车路径轨迹进行了障碍物碰撞检测,避免了泊车过程中发生碰撞风险,一定程度增加了泊车成功率,同时也不