
AGV系统的轨迹跟踪控制方法.pdf

念珊****写意

1/10

2/10
3/10

4/10
5/10
6/10
7/10

8/10

9/10
10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
AGV系统的轨迹跟踪控制方法.pdf
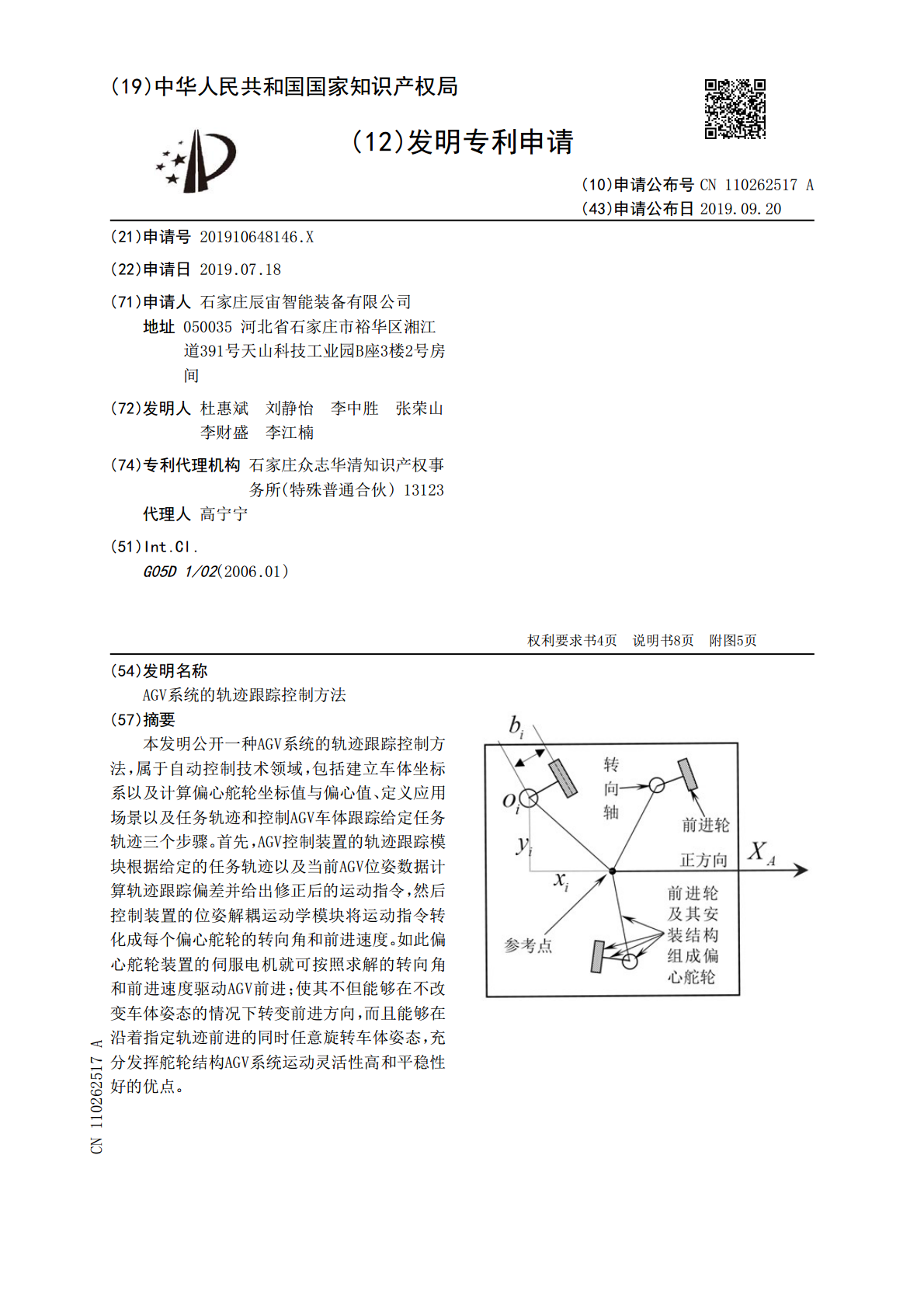
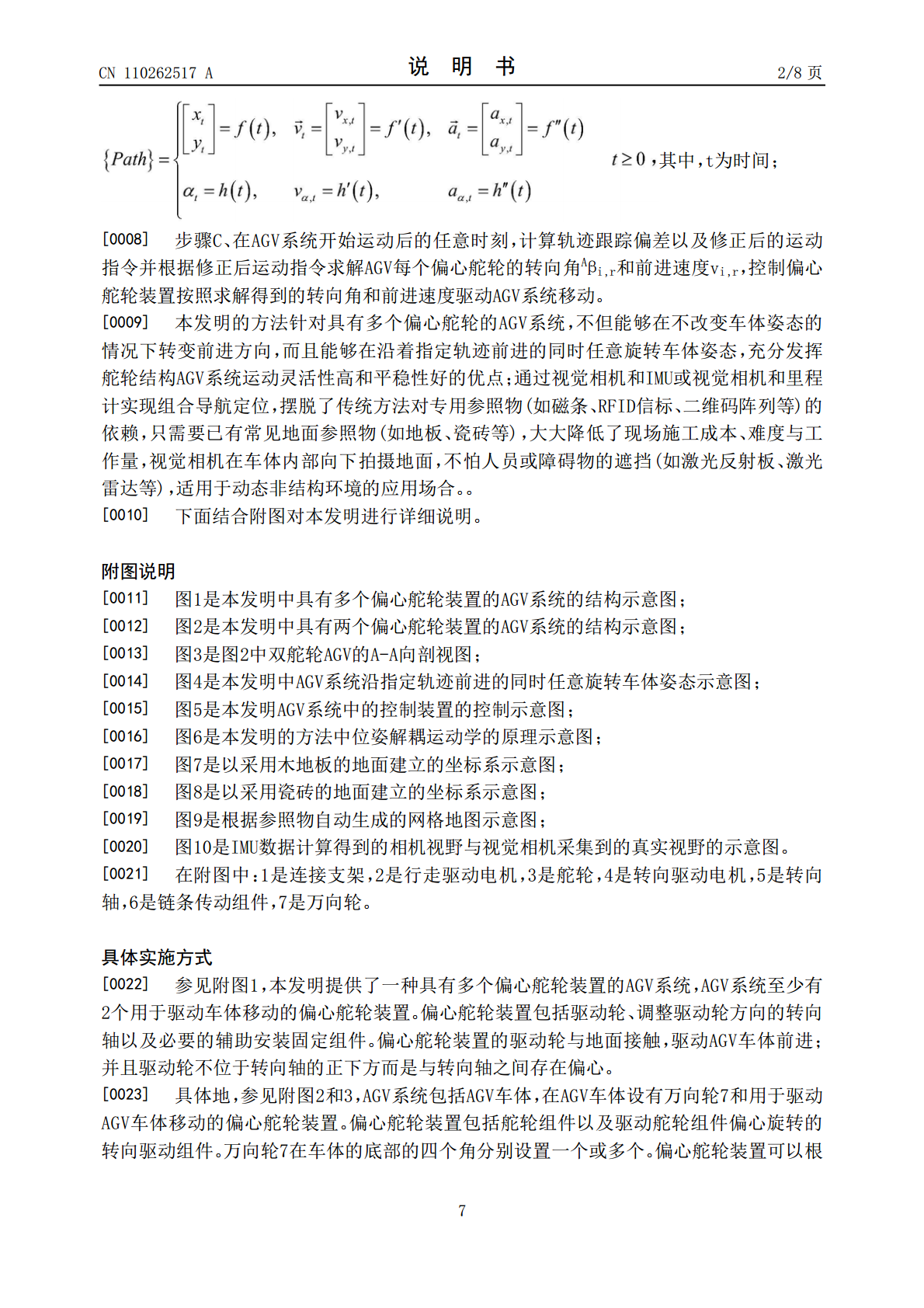
本发明公开一种AGV系统的轨迹跟踪控制方法,属于自动控制技术领域,包括建立车体坐标系以及计算偏心舵轮坐标值与偏心值、定义应用场景以及任务轨迹和控制AGV车体跟踪给定任务轨迹三个步骤。首先,AGV控制装置的轨迹跟踪模块根据给定的任务轨迹以及当前AGV位姿数据计算轨迹跟踪偏差并给出修正后的运动指令,然后控制装置的位姿解耦运动学模块将运动指令转化成每个偏心舵轮的转向角和前进速度。如此偏心舵轮装置的伺服电机就可按照求解的转向角和前进速度驱动AGV前进;使其不但能够在不改变车体姿态的情况下转变前进方向,而且能够在沿
基于AGV系统的轨迹跟踪控制方法.pdf
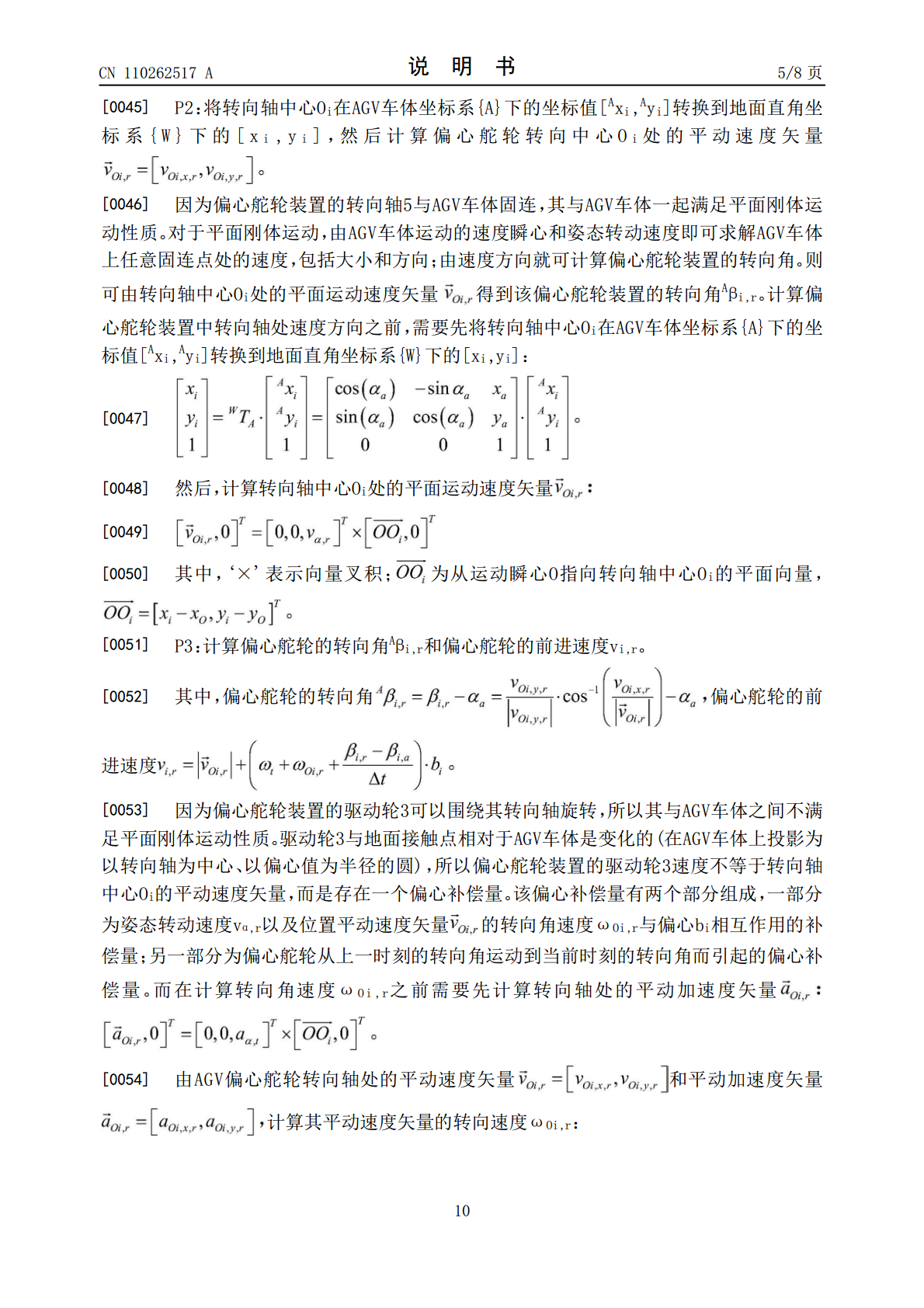
本发明提供基于AGV系统的轨迹跟踪控制方法,涉及AGV系统的控制方法技术领域。操作步骤如下所示:(1)建立AGV轮子动力学模型;(2)设立结构约束,建立AGV系统动力学模型;(3)基于AGV系统的动力学模型的性能轨迹约束,求取约束力矩;(4)建立基于Udwadia‑Kalaba理论的轨迹跟踪控制器,通过所述轨迹跟踪控制器控制所述AGV系统的运行。通过在基于AGV系统的轨迹跟踪控制方法,建模过程中采用Udwadia‑Kalaba理论,不需要再确定通常很难获得的拉格朗日乘数,为约束机械系统的建模开辟了新的途径

基于自适应模糊控制的AGV轨迹跟踪系统.pptx
,目录PartOnePartTwo模糊逻辑系统的基本概念自适应模糊控制算法的原理自适应模糊控制算法的实现过程自适应模糊控制算法的优势PartThreeAGV轨迹跟踪系统的基本概念AGV轨迹跟踪系统的组成AGV轨迹跟踪系统的功能AGV轨迹跟踪系统的应用场景PartFour系统总体设计模糊控制器设计轨迹跟踪算法设计系统实现流程PartFive仿真环境搭建仿真实验结果分析实验验证结果分析系统性能评估PartSix研究结论研究不足与展望THANKS

AGV小车轨迹跟踪控制策略的研究.docx
AGV小车轨迹跟踪控制策略的研究AGV(AutomatedGuidedVehicle)小车是一种自动导引的运输工具,它具有自主导航和运输功能,广泛应用于仓储、生产线等物流运输领域。轨迹跟踪控制策略是实现AGV小车精准运动的关键,在保证稳定可靠性的基础上提高运输效率。一、介绍AGV小车轨迹跟踪控制策略的研究是为了解决AGV小车在运输过程中存在的定位偏差、轨迹偏离等问题。随着AGV小车在物流领域的广泛应用,对其运动控制策略提出更高的要求。二、AGV小车轨迹跟踪控制策略的现状与挑战目前,常用的AGV小车轨迹跟踪

AGV叉车轨迹跟踪控制策略的思考.docx
AGV叉车轨迹跟踪控制策略的思考AGV叉车(AutomatedGuidedVehicle)是一种应用于物流、仓储和生产制造等领域的自动导航运输设备。AGV叉车的轨迹跟踪控制策略是指如何使AGV叉车能够按照预定的轨迹运动并准确跟踪目标轨迹的控制方法和算法。在实际应用中,轨迹跟踪控制策略的设计和实现对AGV叉车的运动精度和效率至关重要。AGV叉车轨迹跟踪控制策略的思考可以从以下几个方面展开:轨迹规划、路径跟踪、动力学建模、控制算法等。首先,轨迹规划是指根据AGV叉车的行驶特性和任务要求,计算出一条适合的轨迹。