
雷达探测角度控制方法、装置、电子设备及可读存储介质.pdf

灵慧****89


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共21页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

雷达探测角度控制方法、装置、电子设备及可读存储介质.pdf
本申请提供了一种雷达探测角度控制方法、装置、电子设备及可读存储介质,涉及无人机技术领域。该方法包括:在无人机飞行过程中,获得无人机在当前位置的第一飞行高度及在历史位置的第二飞行高度;判断第一飞行高度及第二飞行高度是否满足角度调整要求,角度调整要求包括第一飞行高度与第二飞行高度位于不同的飞行高度区间;在满足的情况下,获得第一飞行高度所在的目标飞行高度区间所对应的目标角度调整参数;根据目标角度调整参数,调整无人机的雷达的探测角度。如此,根据飞行高度所在的飞行高度区间对应的角度调整参数,对雷达探测角度进行调整,
电子设备、控制方法、控制装置及可读存储介质.pdf
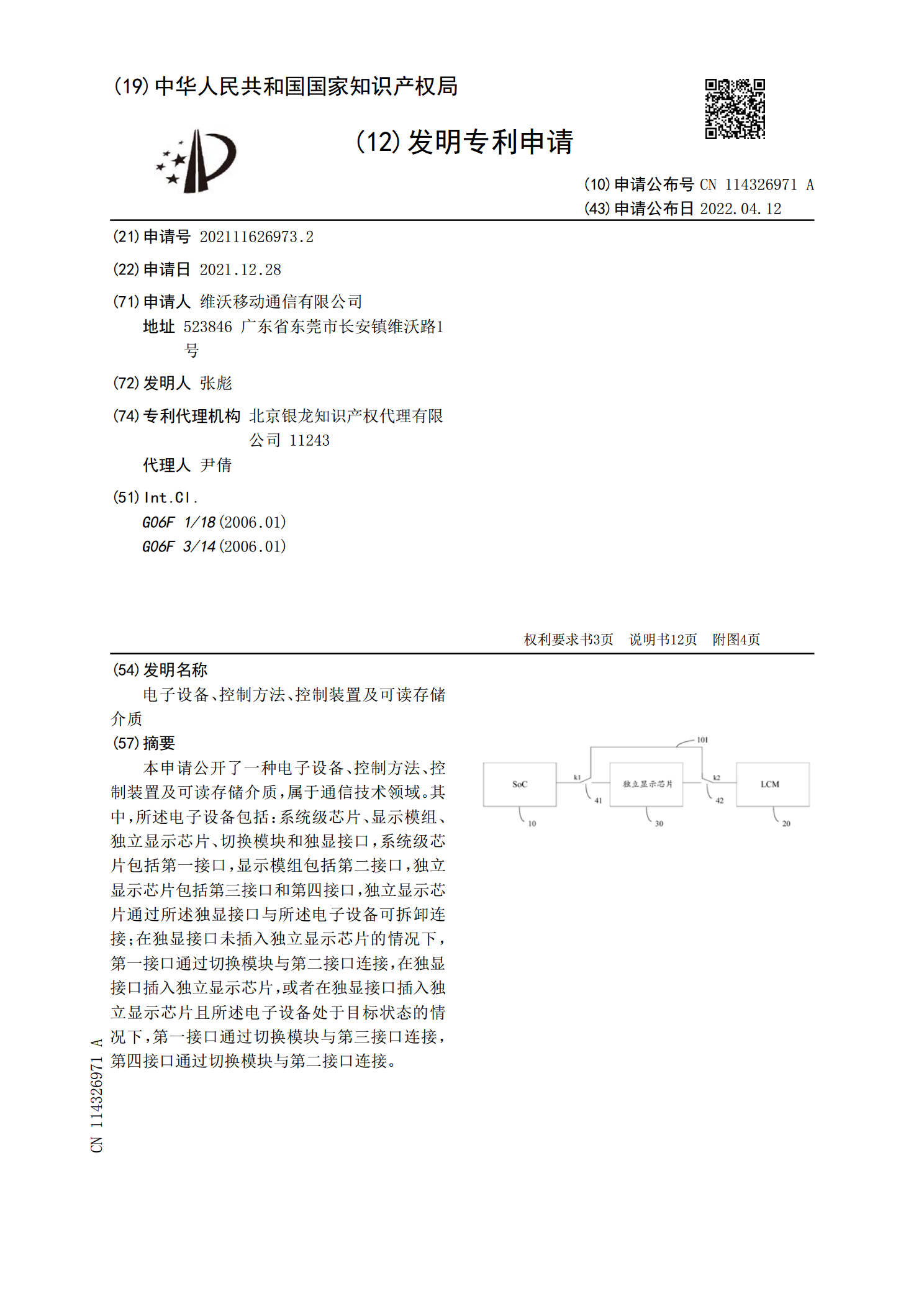
本申请公开了一种电子设备、控制方法、控制装置及可读存储介质,属于通信技术领域。其中,所述电子设备包括:系统级芯片、显示模组、独立显示芯片、切换模块和独显接口,系统级芯片包括第一接口,显示模组包括第二接口,独立显示芯片包括第三接口和第四接口,独立显示芯片通过所述独显接口与所述电子设备可拆卸连接;在独显接口未插入独立显示芯片的情况下,第一接口通过切换模块与第二接口连接,在独显接口插入独立显示芯片,或者在独显接口插入独立显示芯片且所述电子设备处于目标状态的情况下,第一接口通过切换模块与第三接口连接,第四接口通过
飞行控制方法、装置、电子设备及可读存储介质.pdf
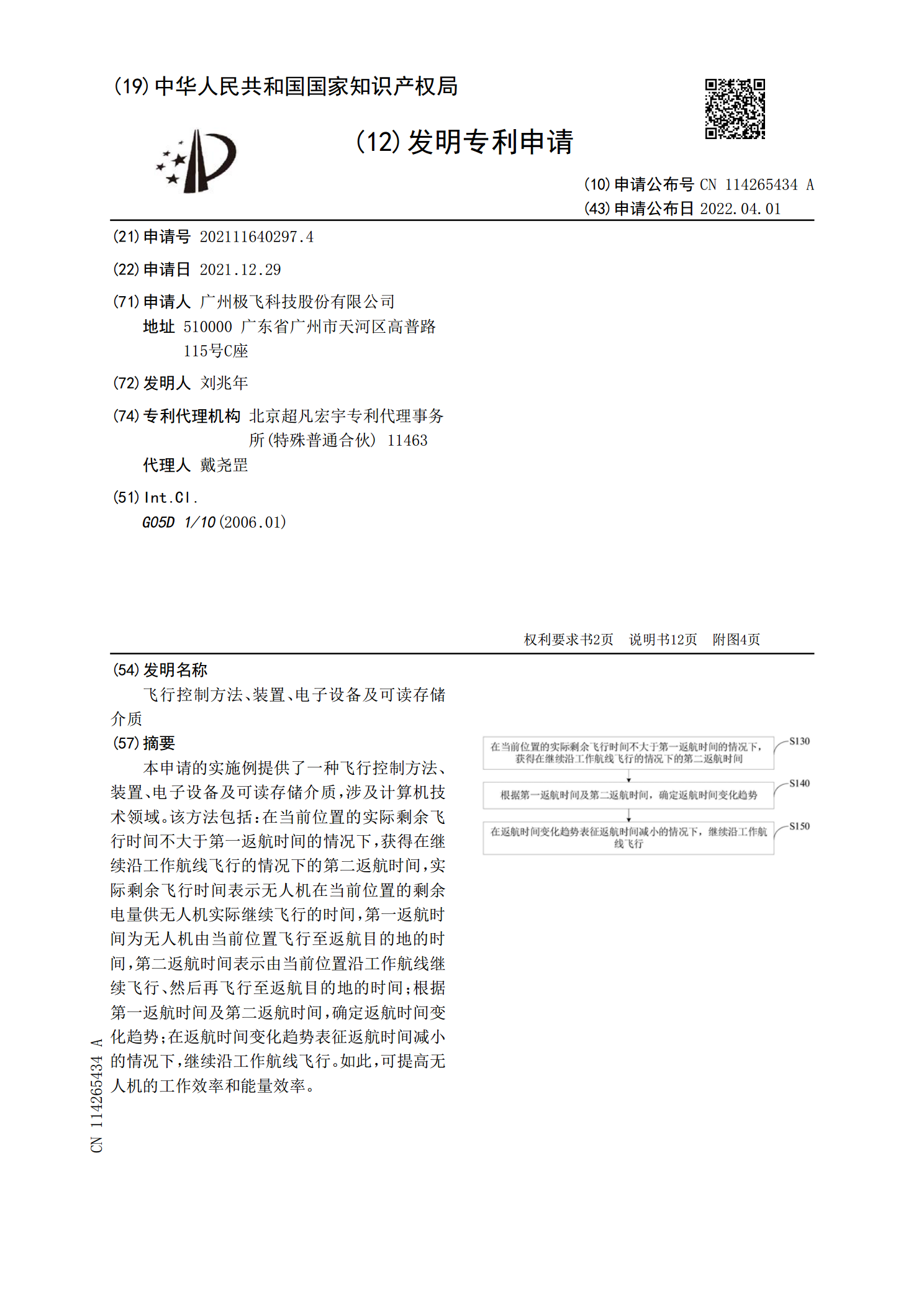
本申请的实施例提供了一种飞行控制方法、装置、电子设备及可读存储介质,涉及计算机技术领域。该方法包括:在当前位置的实际剩余飞行时间不大于第一返航时间的情况下,获得在继续沿工作航线飞行的情况下的第二返航时间,实际剩余飞行时间表示无人机在当前位置的剩余电量供无人机实际继续飞行的时间,第一返航时间为无人机由当前位置飞行至返航目的地的时间,第二返航时间表示由当前位置沿工作航线继续飞行、然后再飞行至返航目的地的时间;根据第一返航时间及第二返航时间,确定返航时间变化趋势;在返航时间变化趋势表征返航时间减小的情况下,继续
设备控制方法、装置、电子设备及可读存储介质.pdf
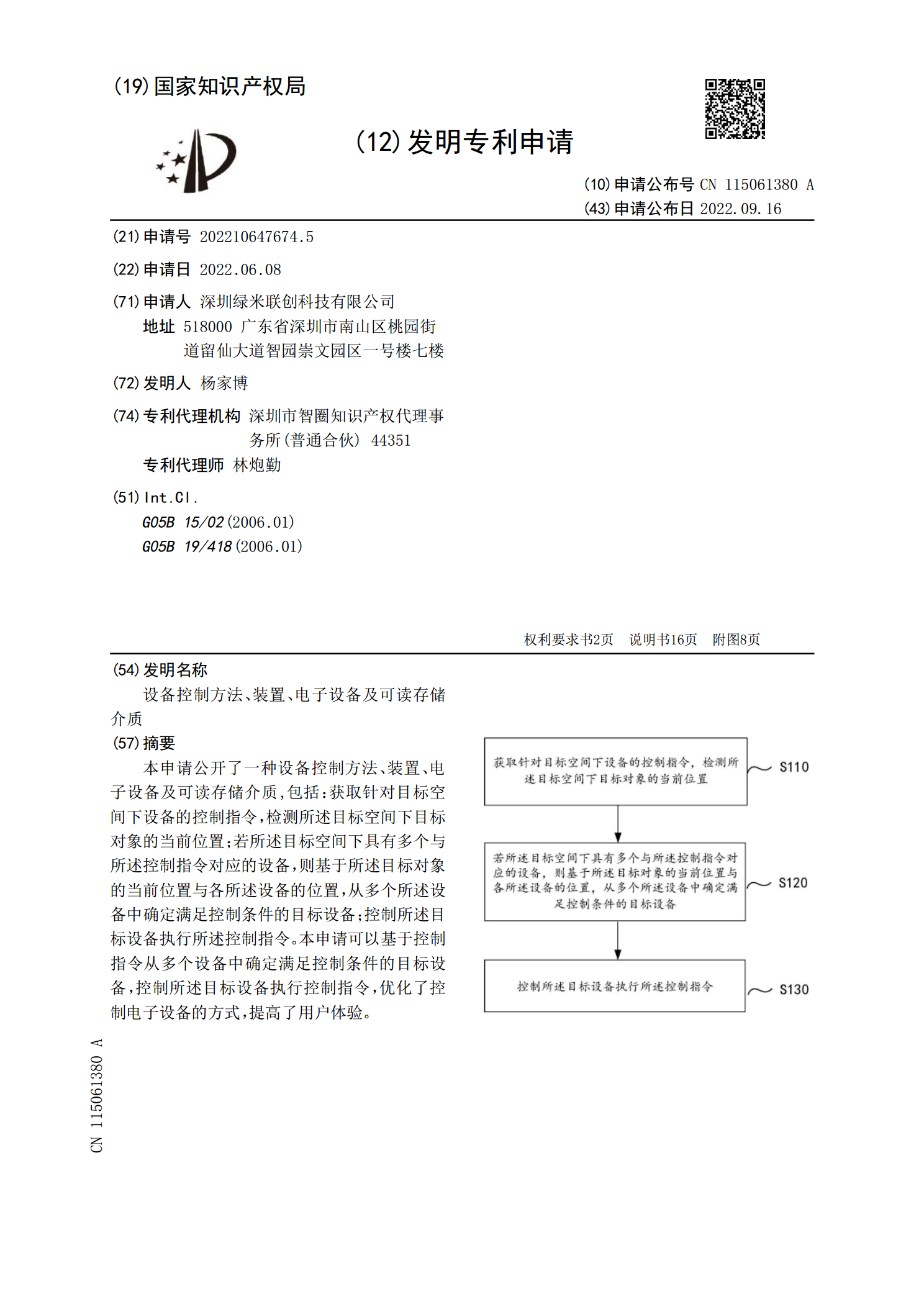
本申请公开了一种设备控制方法、装置、电子设备及可读存储介质,包括:获取针对目标空间下设备的控制指令,检测所述目标空间下目标对象的当前位置;若所述目标空间下具有多个与所述控制指令对应的设备,则基于所述目标对象的当前位置与各所述设备的位置,从多个所述设备中确定满足控制条件的目标设备;控制所述目标设备执行所述控制指令。本申请可以基于控制指令从多个设备中确定满足控制条件的目标设备,控制所述目标设备执行控制指令,优化了控制电子设备的方式,提高了用户体验。

游戏控制方法、装置、电子设备及可读存储介质.pdf
本申请公开了一种游戏控制方法、装置、电子设备、可读存储介质,属于游戏领域,该方法包括:在游戏过程中,采集非惯用手对非游戏控件的第一控制数据;其中,所述非惯用手对所述非游戏控件的控制灵活度大于对游戏控件的控制灵活度;将所述第一控制数据转换为针对游戏控件的第二控制数据;基于所述第二控制数据控制所述游戏。在本申请中,提升游戏控制质量,满足用户游戏控制需求。