
一种矿用井下管道抓取机器人.pdf

宜然****找我


1/10

2/10

3/10

4/10

5/10

6/10

7/10

8/10

9/10

10/10
亲,该文档总共11页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

一种矿用井下管道抓取机器人.pdf
本发明公开了一种矿用井下管道抓取机器人,包括支撑底板和控制终端,支撑底板设有:至少两个机械臂,机械臂的后端通过旋转底座与支撑底板连接,机械臂的前端设有抓手,并且至少存在一个机械臂的前端固定连接有双目视觉相机,双目视觉相机方向与抓手方向一致;液压泵站;激光雷达;分别设置于支撑底板前后两端的超声波避障传感器;分别设置于支撑底板左右两侧的履带行走机构;若干伸缩支撑腿;控制终端分别与履带行走机构、机械臂、双目视觉相机、激光雷达、超声波避障传感器电连接。本发明采用多机协同机制的机械臂且具有视觉识别定位的功能,不仅保

矿用瓦斯管道在矿井下的作用.doc
矿用瓦斯管道在矿井下的作用?矿用瓦斯管道的使用领域:矿井的给/排水管道,压风管、抽放瓦斯管。矿井通风是煤矿生产的一个重要环节。那么矿用瓦斯管道在井下的作用有以下三个方面:(1)将足够的新鲜空气送到井下,供给井下人员呼吸所需要的氧气。(2)将冲淡有害气体和矿尘后的空气排出地面,保证井下空气质量并使矿尘浓度限制在的安全范围内。(3)新鲜空气送到井下后,能够调节井下巷道和工作场所的气候条件,满足井下规定的风速、温度和湿度的要求,创造良好的作业环境。

矿用多杆联动救援机器人的越障及抓取性能研究.docx
矿用多杆联动救援机器人的越障及抓取性能研究矿用多杆联动救援机器人的越障及抓取性能研究摘要:随着矿山事故的频发,对于矿山救援机器人的需求日益增加。本论文以矿用多杆联动救援机器人为研究对象,对其越障及抓取性能进行了深入研究。通过建立机器人的机械模型,对其动力学特性进行了分析,从而为机器人的控制算法提供基础。在越障方面,本文设计了一种基于视觉感知的障碍检测与避障算法,并通过实验验证了其有效性。在抓取方面,本文设计了一种基于力控制的抓取策略,并通过实验测试了机器人的抓取性能。实验结果表明,矿用多杆联动救援机器人具

一种抓取机器人.pdf
本发明涉及娱乐机器人技术领域,公开了抓取机器人。本发明抓取机器人包括机器人主体、转动设置于机器人主体上的机械臂以及与机械臂转动连接的机械手,机械臂与机器人主体通过第一转动轴转动连接,第一转动轴与第一驱动电机的输出端转动连接,第一驱动电机还电连接有驱动电缆,驱动电缆包括依次设置的第一电缆、第二电缆、第三电缆,转动轴的侧面上、对应于机械臂内的位置处设有供第三电缆顺出的开口,第一电缆固设于机器人主体上,第二电缆沿转动轴的轴线设置于转动轴内,第三电缆从转动轴的开口顺出,并固设于机械臂内。本发明的抓取机器人避免了驱
一种井下管道自适应移动机器人.pdf
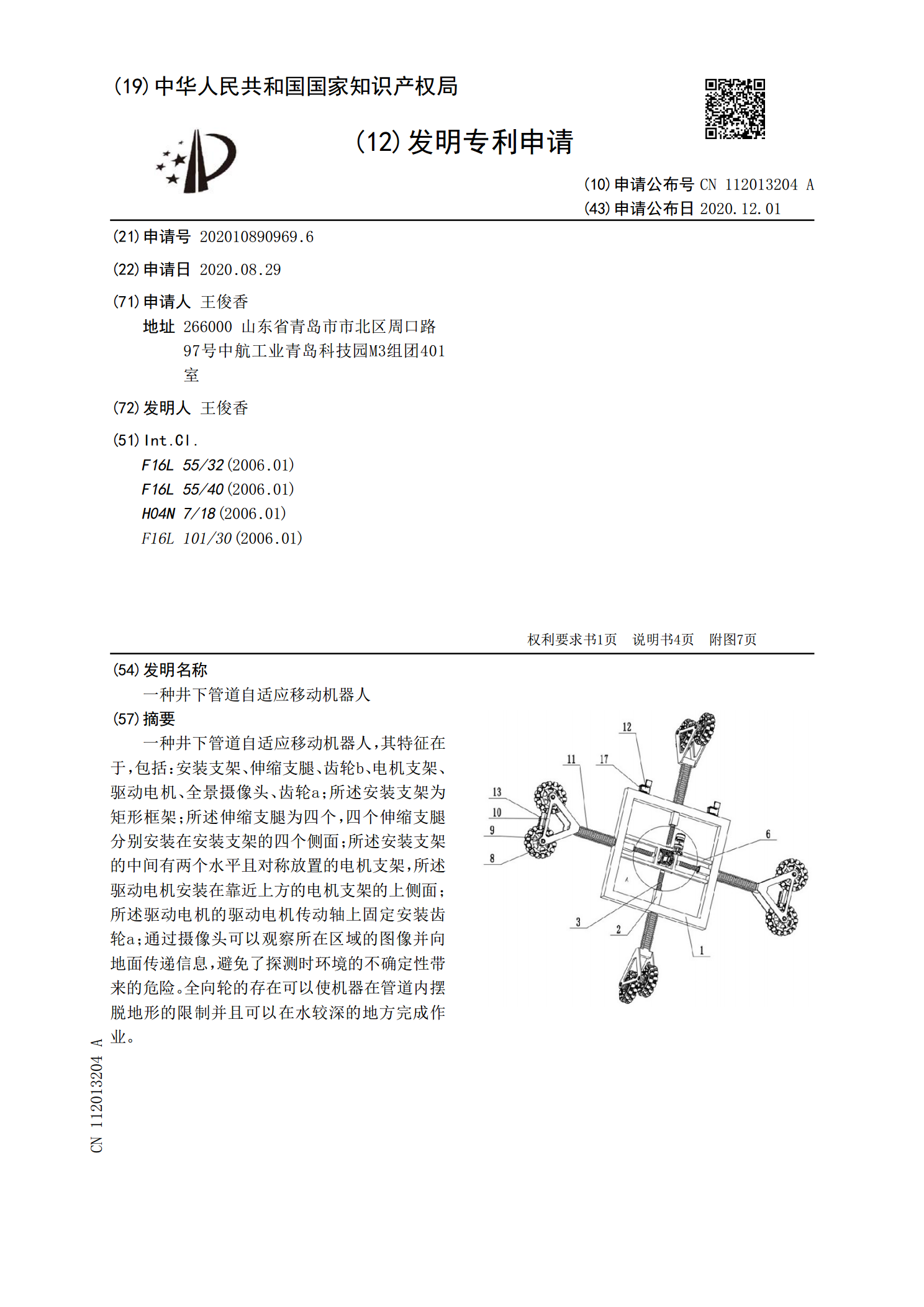
一种井下管道自适应移动机器人,其特征在于,包括:安装支架、伸缩支腿、齿轮b、电机支架、驱动电机、全景摄像头、齿轮a;所述安装支架为矩形框架;所述伸缩支腿为四个,四个伸缩支腿分别安装在安装支架的四个侧面;所述安装支架的中间有两个水平且对称放置的电机支架,所述驱动电机安装在靠近上方的电机支架的上侧面;所述驱动电机的驱动电机传动轴上固定安装齿轮a;通过摄像头可以观察所在区域的图像并向地面传递信息,避免了探测时环境的不确定性带来的危险。全向轮的存在可以使机器在管道内摆脱地形的限制并且可以在水较深的地方完成作业。