
矿用多杆联动救援机器人的越障及抓取性能研究.docx

快乐****蜜蜂


1/3

2/3

3/3
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

矿用多杆联动救援机器人的越障及抓取性能研究.docx
矿用多杆联动救援机器人的越障及抓取性能研究矿用多杆联动救援机器人的越障及抓取性能研究摘要:随着矿山事故的频发,对于矿山救援机器人的需求日益增加。本论文以矿用多杆联动救援机器人为研究对象,对其越障及抓取性能进行了深入研究。通过建立机器人的机械模型,对其动力学特性进行了分析,从而为机器人的控制算法提供基础。在越障方面,本文设计了一种基于视觉感知的障碍检测与避障算法,并通过实验验证了其有效性。在抓取方面,本文设计了一种基于力控制的抓取策略,并通过实验测试了机器人的抓取性能。实验结果表明,矿用多杆联动救援机器人具
越障爬杆机器人.pdf
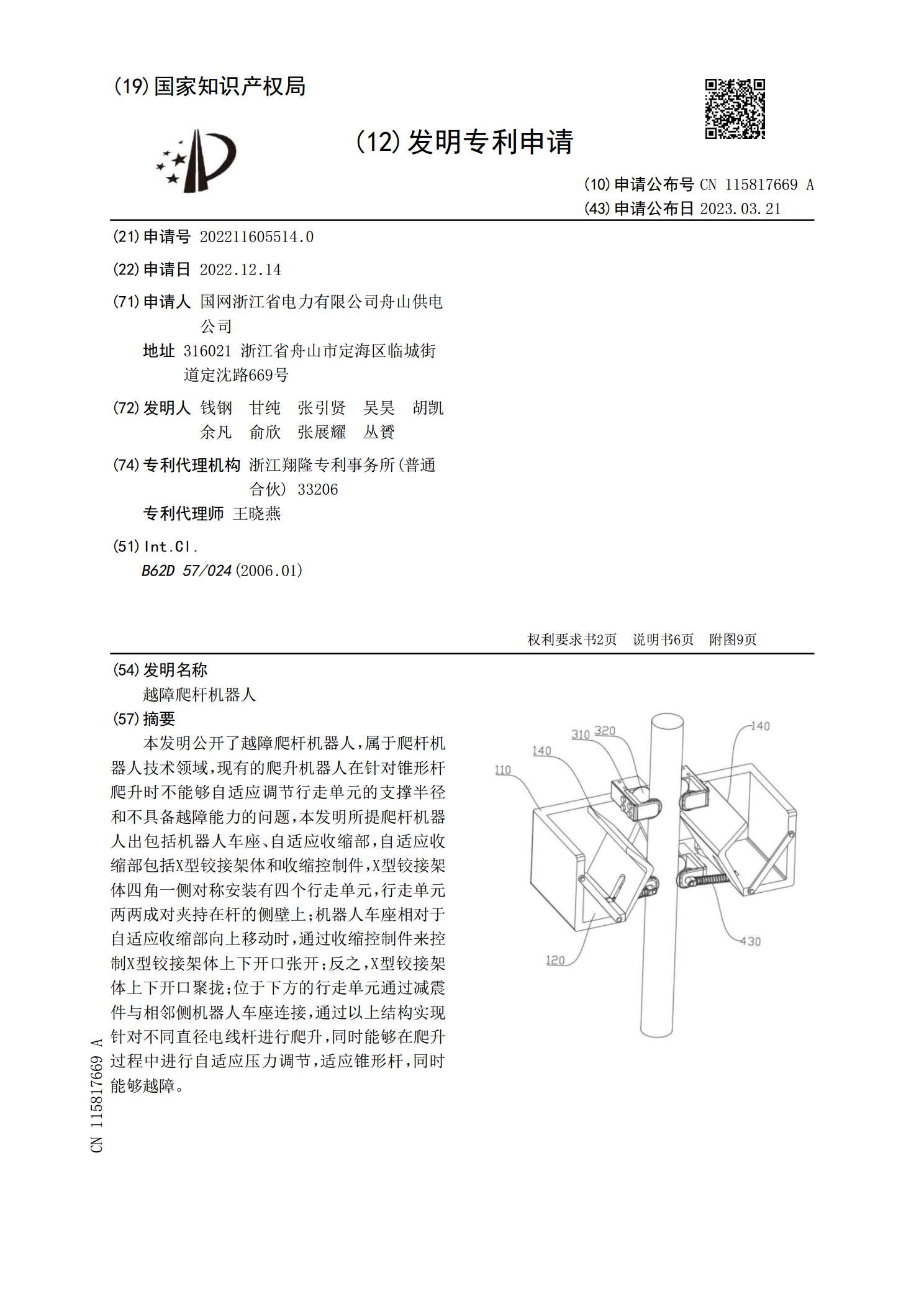
本发明公开了越障爬杆机器人,属于爬杆机器人技术领域,现有的爬升机器人在针对锥形杆爬升时不能够自适应调节行走单元的支撑半径和不具备越障能力的问题,本发明所提爬杆机器人出包括机器人车座、自适应收缩部,自适应收缩部包括X型铰接架体和收缩控制件,X型铰接架体四角一侧对称安装有四个行走单元,行走单元两两成对夹持在杆的侧壁上;机器人车座相对于自适应收缩部向上移动时,通过收缩控制件来控制X型铰接架体上下开口张开;反之,X型铰接架体上下开口聚拢;位于下方的行走单元通过减震件与相邻侧机器人车座连接,通过以上结构实现针对不同

越障爬杆机器人.pdf
本发明公开了一种越障爬杆机器人,包括抱住目标杆的固定基座以及驱动固定基座沿目标杆上升和下降的风机组件;所述固定基座上围绕目标杆的圆周方向设有若干组越障轮组件,其中至少一组越障轮组件通过主动驱动装置向目标杆主动压紧,其余的越障轮组件通过弹性连接件与目标杆被动压紧。本发明的越障爬杆机器人在攀爬时使用涵道风力推进,速度较快,同时U型轮构成的越障轮组件具有跨越一定障碍的能力,且通过摆杆和伸缩杆的配合可实现一定直径范围的目标杆的快速攀爬和锁止定位,同时兼顾了轮式爬杆机器人的爬杆速度和臂式爬杆机器人的越障能力。

越野机器人多杆悬架的越障分析.docx
越野机器人多杆悬架的越障分析越野机器人多杆悬架的越障分析摘要:越野机器人在不平坦的地面上行驶时需要克服各种障碍物,保持稳定性和平稳性。多杆悬架系统因其动力学性能优越而被广泛应用于越野机器人中。本文将从多杆悬架的设计原理、越障策略以及成功的实际应用等方面,对越野机器人多杆悬架的越障问题进行分析。1.引言越野机器人在农业、探测任务和救援等领域中发挥着重要作用。然而,不平坦的地面环境对越野机器人的稳定性和平稳性提出了严峻的挑战。多杆悬架系统作为一种有效的解决方案,可以显著提升越野机器人的越障性能。2.多杆悬架系

煤矿探测机器人垂直越障性能研究.docx
煤矿探测机器人垂直越障性能研究标题:煤矿探测机器人垂直越障性能研究摘要:煤矿安全事故频发,防止矿井存在的隐患对于保障矿工生命安全至关重要。因此,研发一种具有良好越障性能的煤矿探测机器人对于提高矿山巡检效率和保障矿工安全具有重要意义。本论文对煤矿探测机器人垂直越障性能进行了研究,包括越障原理、越障环境模拟实验以及改进和优化措施等方面。研究表明,通过合理设计和改进机器人的动力学建模和控制系统,可以显著提升煤矿探测机器人的垂直越障性能。关键词:煤矿探测机器人、垂直越障性能、动力学建模、控制系统、安全性能一、引言