
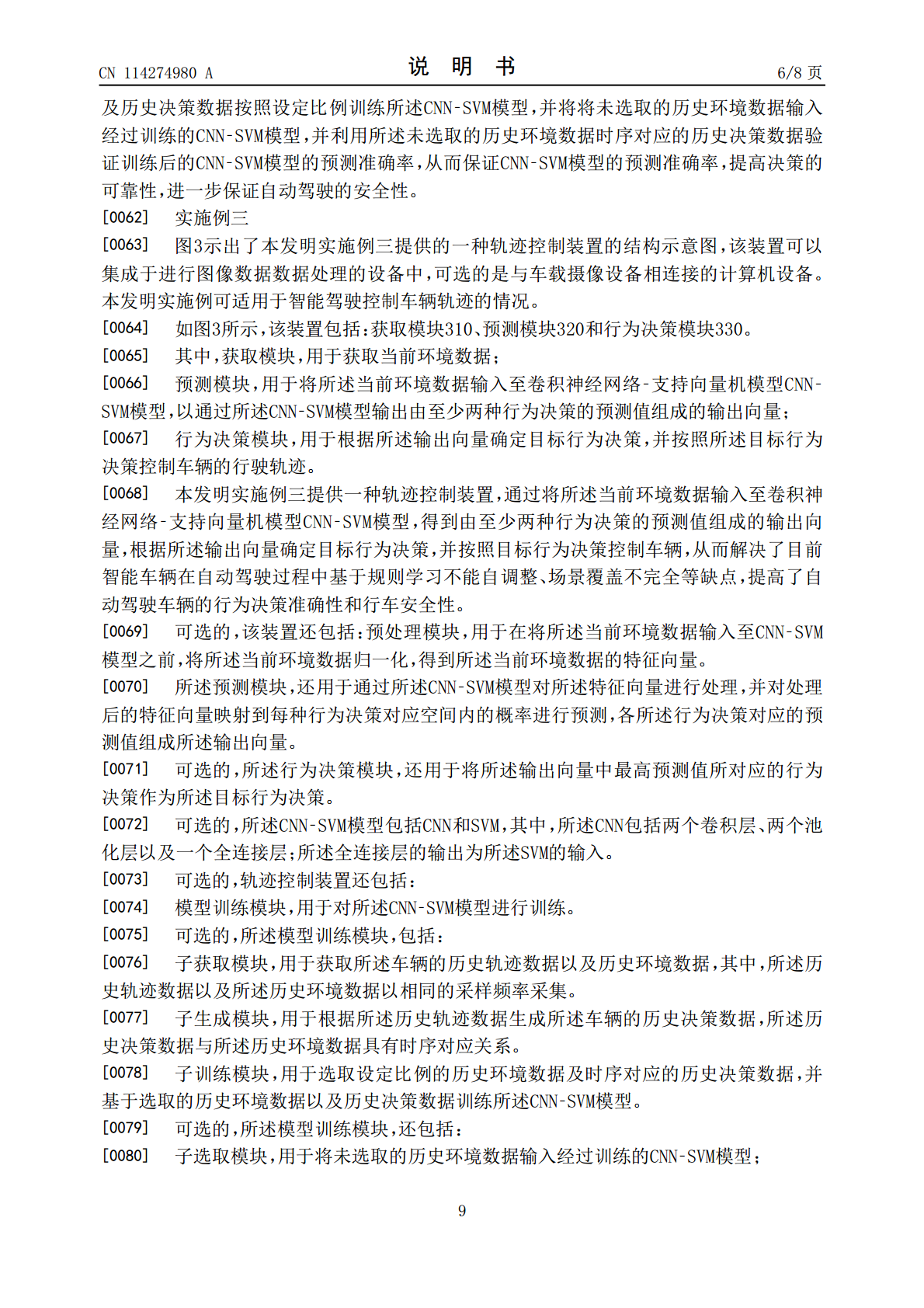
轨迹控制方法、装置、车辆及存储介质.pdf

猫巷****熙柔

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共14页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

轨迹控制方法、装置、车辆及存储介质.pdf
本发明公开了一种轨迹控制方法、装置、车辆及存储介质。该方法包括:获取当前环境数据;将所述当前环境数据输入至卷积神经网络‑支持向量机模型CNN‑SVM模型,以通过所述CNN‑SVM模型输出由至少两种行为决策的预测值组成的输出向量;根据所述输出向量确定目标行为决策,并按照所述目标行为决策控制车辆的行驶轨迹。上述技术方案解决了智能车辆在自动驾驶过程中基于规则学习不能自调整、场景覆盖不完全等缺点,提高了自动驾驶车辆的行为决策可靠性和行车安全性。
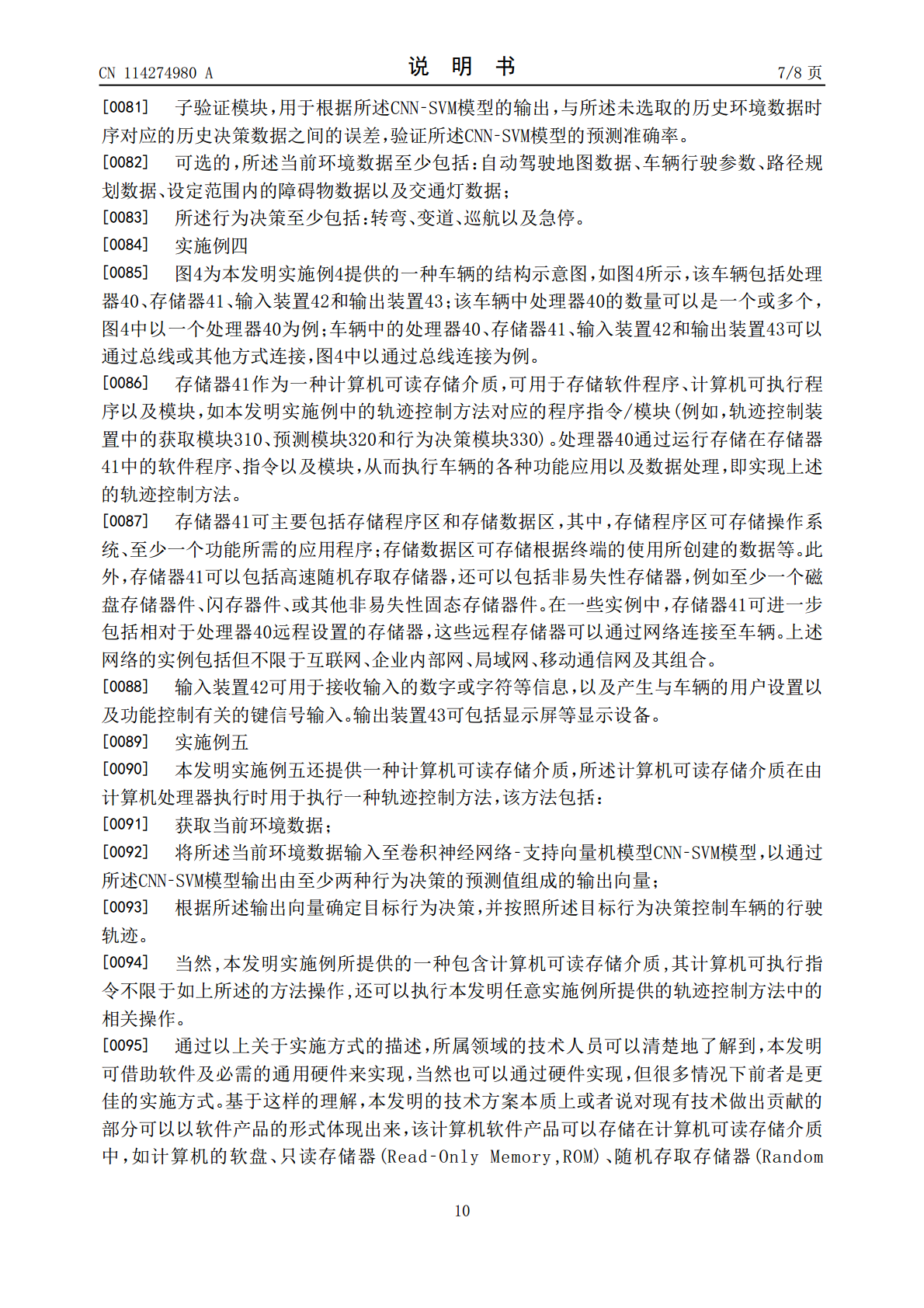
周围车辆轨迹预测方法、装置、车辆及存储介质.pdf
本发明实施例公开了一种周围车辆轨迹预测方法、装置、车辆及存储介质,该方法包括:根据车道线确定主车辆的主车车道以及相邻车道;基于预设的环境模型,从主车车道和相邻车道上确定主车辆周围的目标车辆;获取目标车辆的路径预测类型、预测速度和横向路径特征;根据路径预测类型、预测速度和横向路径特征,分析目标车辆的动机意图类型;基于动机意图类型,在空间上对目标车辆进行多个目标位置点采样,以获得多条采样轨迹;获取多条采样轨迹中成本最低的采样轨迹,作为目标车辆的预测行驶轨迹;能够实现主车辆的周围车辆的行驶轨迹的预测,准确率较高
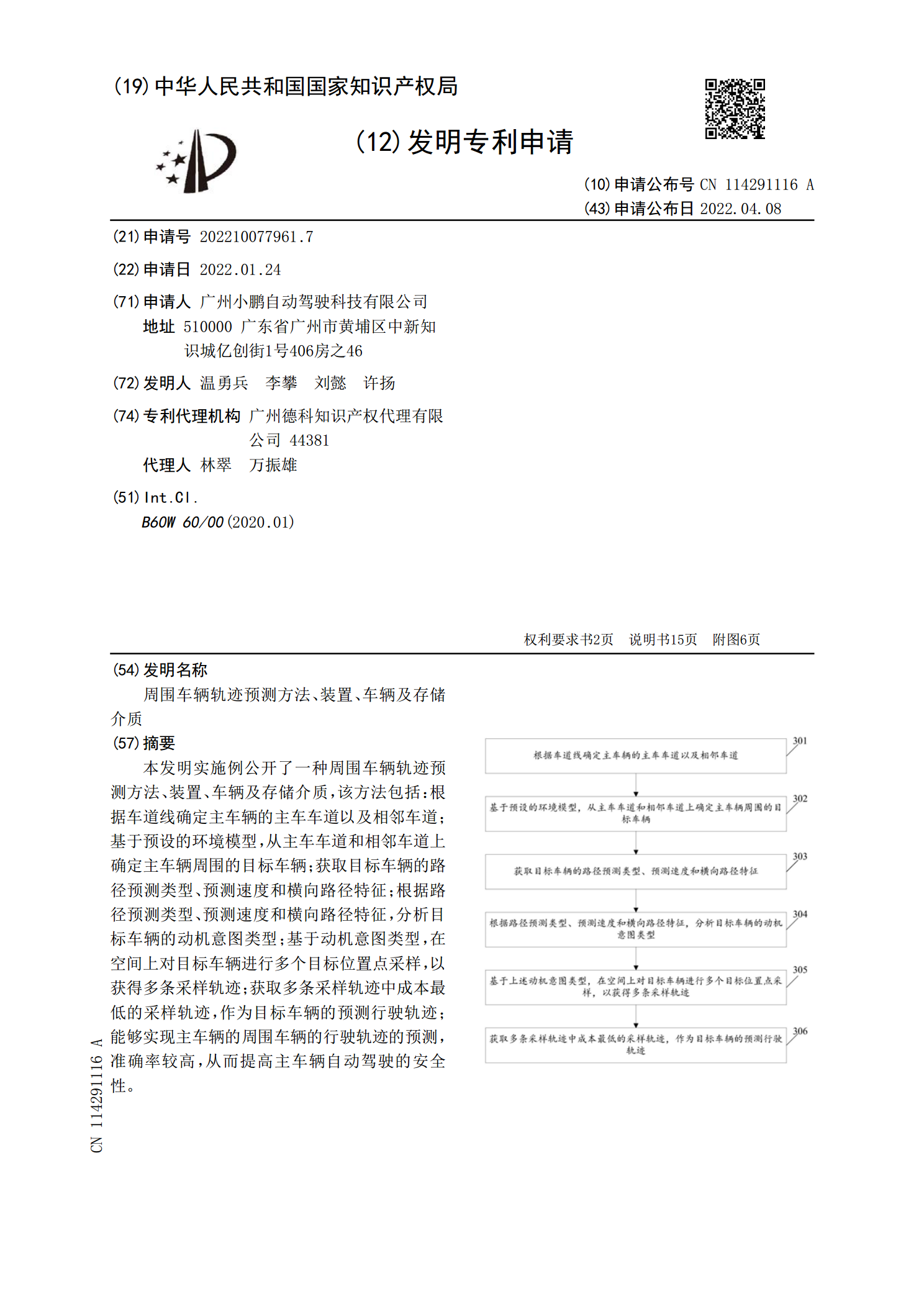
车辆控制方法、装置、存储介质及车辆.pdf
本公开涉及一种车辆控制方法、装置、存储介质及车辆。本公开的车辆控制方法包括:获取车辆前方目标路口处的当前信号灯状态;在当前信号灯状态不为红灯状态的情况下,根据当前信号灯状态、当前车速、车辆当前相对于目标路口的位置、以及预设的车速模型,确定车速控制策略,其中,车速模型包括第一车速模型,第一车速模型用于表征车辆相对于路口的位置、和车辆从该位置处能够以目标减加速度刹停于该路口的最大车速之间的对应关系;根据车速控制策略,控制车辆的车速。通过本公开,可以使得车辆智能自动化,提高自动驾驶的安全性,预防交通事故的产生。
车辆控制方法、装置、存储介质及车辆.pdf
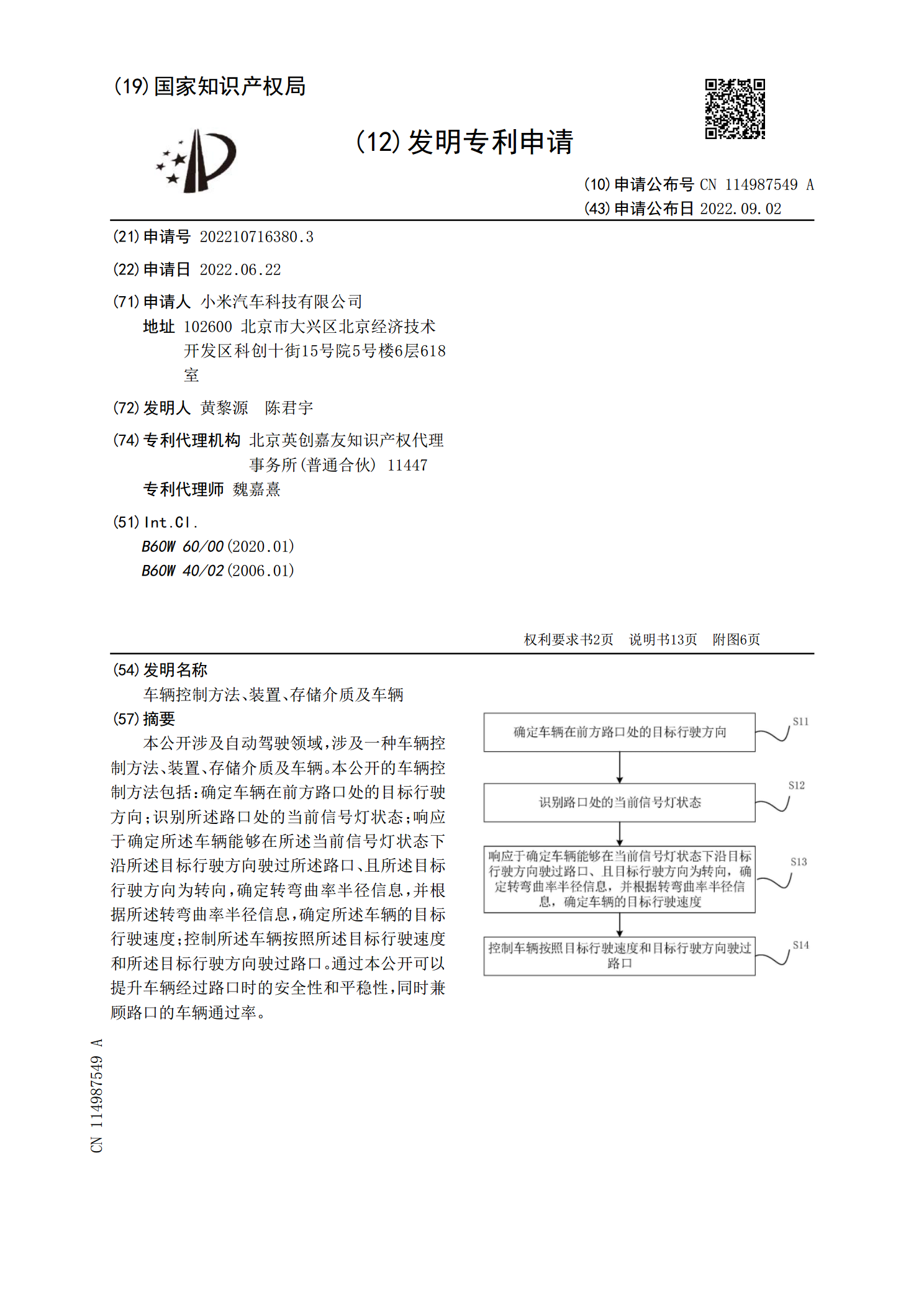
本公开涉及自动驾驶领域,涉及一种车辆控制方法、装置、存储介质及车辆。本公开的车辆控制方法包括:确定车辆在前方路口处的目标行驶方向;识别所述路口处的当前信号灯状态;响应于确定所述车辆能够在所述当前信号灯状态下沿所述目标行驶方向驶过所述路口、且所述目标行驶方向为转向,确定转弯曲率半径信息,并根据所述转弯曲率半径信息,确定所述车辆的目标行驶速度;控制所述车辆按照所述目标行驶速度和所述目标行驶方向驶过路口。通过本公开可以提升车辆经过路口时的安全性和平稳性,同时兼顾路口的车辆通过率。
车辆控制方法、装置、车辆及存储介质.pdf
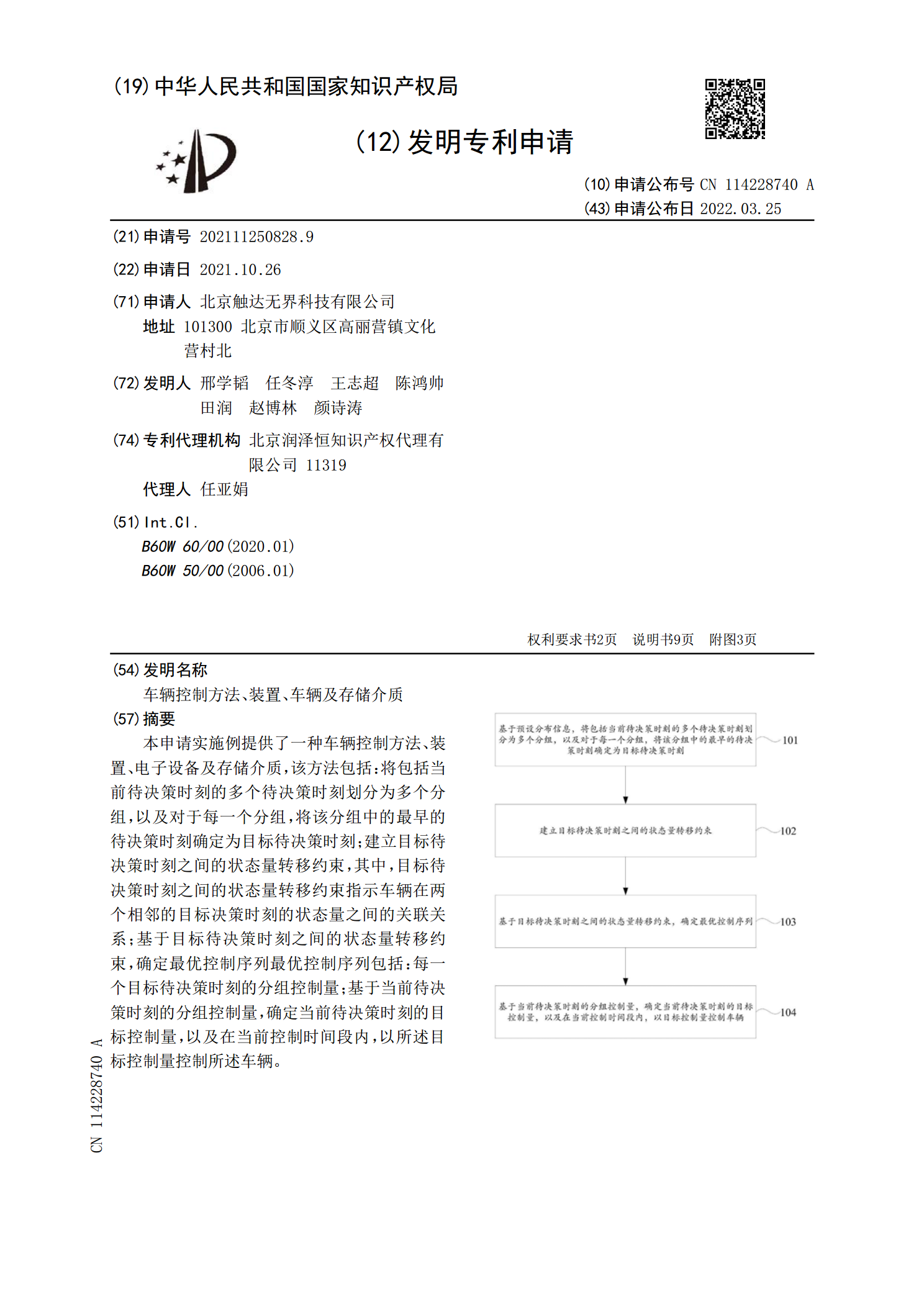
本申请实施例提供了一种车辆控制方法、装置、电子设备及存储介质,该方法包括:将包括当前待决策时刻的多个待决策时刻划分为多个分组,以及对于每一个分组,将该分组中的最早的待决策时刻确定为目标待决策时刻;建立目标待决策时刻之间的状态量转移约束,其中,目标待决策时刻之间的状态量转移约束指示车辆在两个相邻的目标决策时刻的状态量之间的关联关系;基于目标待决策时刻之间的状态量转移约束,确定最优控制序列最优控制序列包括:每一个目标待决策时刻的分组控制量;基于当前待决策时刻的分组控制量,确定当前待决策时刻的目标控制量,以及在