
周围车辆轨迹预测方法、装置、车辆及存储介质.pdf

阳炎****找我

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共24页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
周围车辆轨迹预测方法、装置、车辆及存储介质.pdf
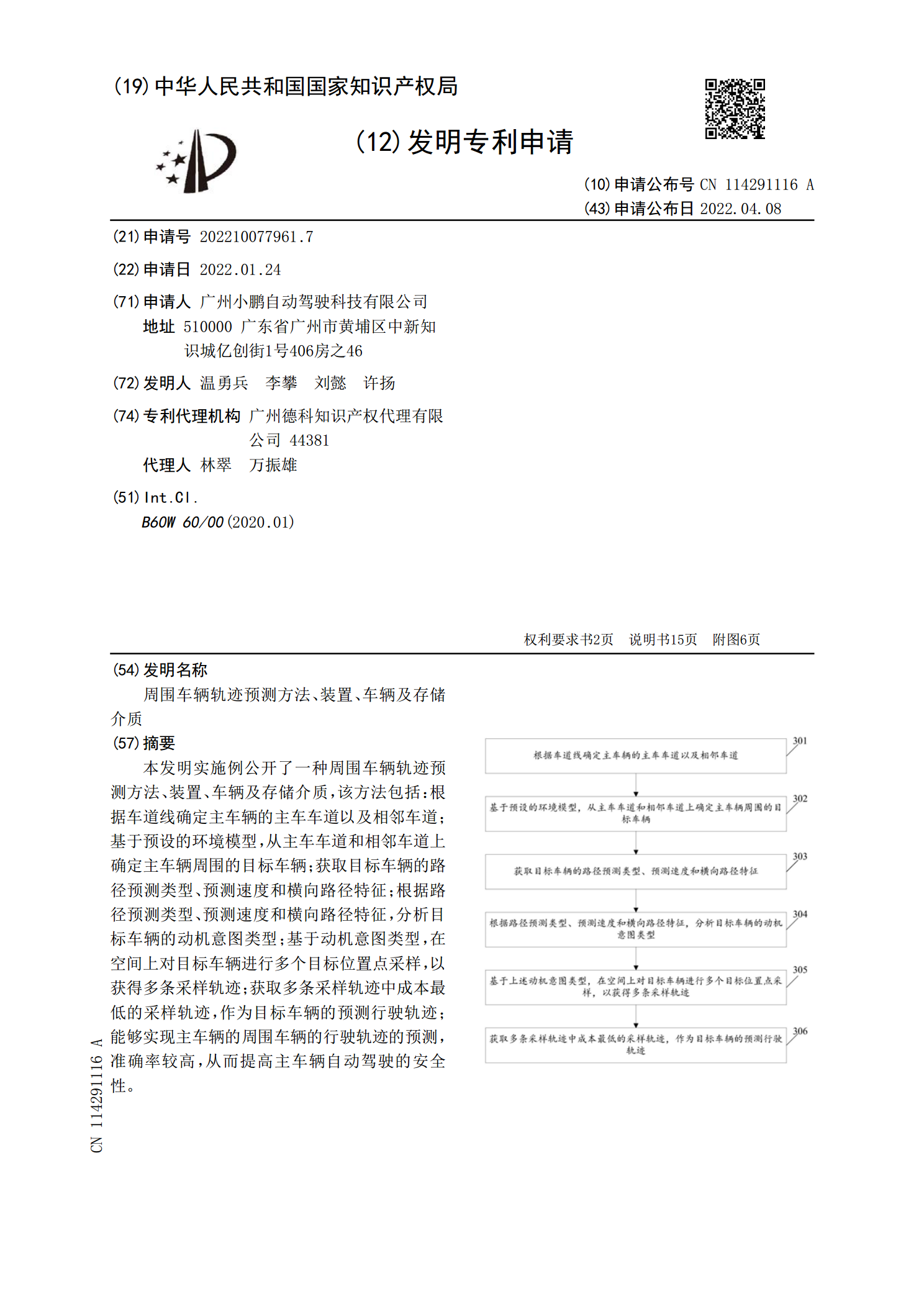
本发明实施例公开了一种周围车辆轨迹预测方法、装置、车辆及存储介质,该方法包括:根据车道线确定主车辆的主车车道以及相邻车道;基于预设的环境模型,从主车车道和相邻车道上确定主车辆周围的目标车辆;获取目标车辆的路径预测类型、预测速度和横向路径特征;根据路径预测类型、预测速度和横向路径特征,分析目标车辆的动机意图类型;基于动机意图类型,在空间上对目标车辆进行多个目标位置点采样,以获得多条采样轨迹;获取多条采样轨迹中成本最低的采样轨迹,作为目标车辆的预测行驶轨迹;能够实现主车辆的周围车辆的行驶轨迹的预测,准确率较高

轨迹控制方法、装置、车辆及存储介质.pdf
本发明公开了一种轨迹控制方法、装置、车辆及存储介质。该方法包括:获取当前环境数据;将所述当前环境数据输入至卷积神经网络‑支持向量机模型CNN‑SVM模型,以通过所述CNN‑SVM模型输出由至少两种行为决策的预测值组成的输出向量;根据所述输出向量确定目标行为决策,并按照所述目标行为决策控制车辆的行驶轨迹。上述技术方案解决了智能车辆在自动驾驶过程中基于规则学习不能自调整、场景覆盖不完全等缺点,提高了自动驾驶车辆的行为决策可靠性和行车安全性。

车辆轨迹预测方法、装置、电子设备及存储介质.pdf
本公开提供一种车辆轨迹预测方法、装置、电子设备及存储介质,涉及人工智能领域,具体涉及自动驾驶、计算机视觉、智能交通和语音处理等技术领域,可以应用于车辆轨迹预测等场景。方案包括:从主车的预设监控范围的候选车辆中,识别出存在绕行意图的目标车辆;确定出目标车辆对应的障碍物集合;获取障碍物集合中每个障碍物与目标车辆的速度比较值、每个障碍物与目标车辆之间的距离信息;基于每个障碍物对应的速度比较值和距离信息,从障碍物集合中确定出目标车辆需要绕行的目标障碍物;预测目标车辆的绕行目标障碍物的行驶轨迹。上述方法能够在较大程
车辆轨迹预测方法、装置、电子设备及存储介质.pdf
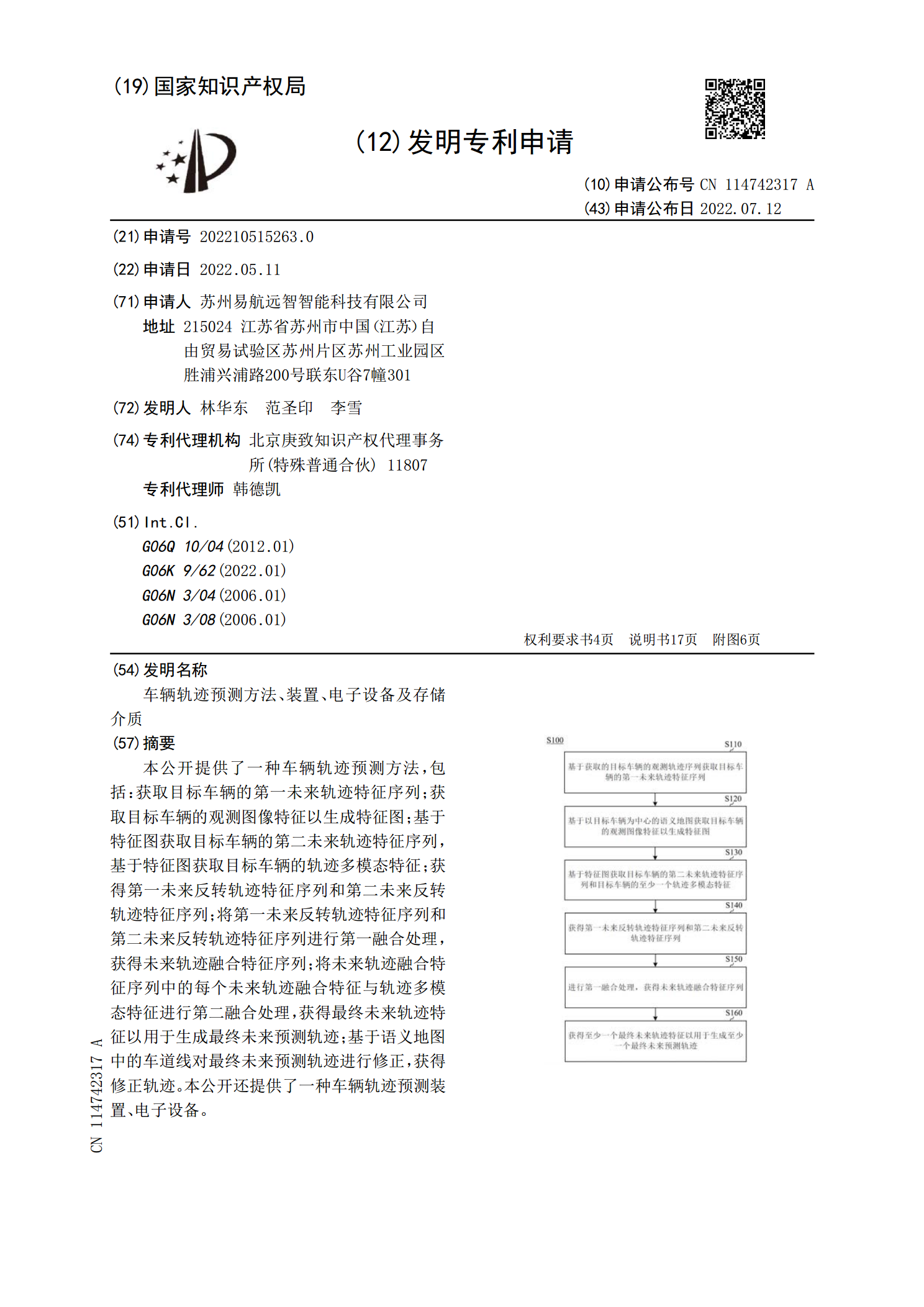
本公开提供了一种车辆轨迹预测方法,包括:获取目标车辆的第一未来轨迹特征序列;获取目标车辆的观测图像特征以生成特征图;基于特征图获取目标车辆的第二未来轨迹特征序列,基于特征图获取目标车辆的轨迹多模态特征;获得第一未来反转轨迹特征序列和第二未来反转轨迹特征序列;将第一未来反转轨迹特征序列和第二未来反转轨迹特征序列进行第一融合处理,获得未来轨迹融合特征序列;将未来轨迹融合特征序列中的每个未来轨迹融合特征与轨迹多模态特征进行第二融合处理,获得最终未来轨迹特征以用于生成最终未来预测轨迹;基于语义地图中的车道线对最终
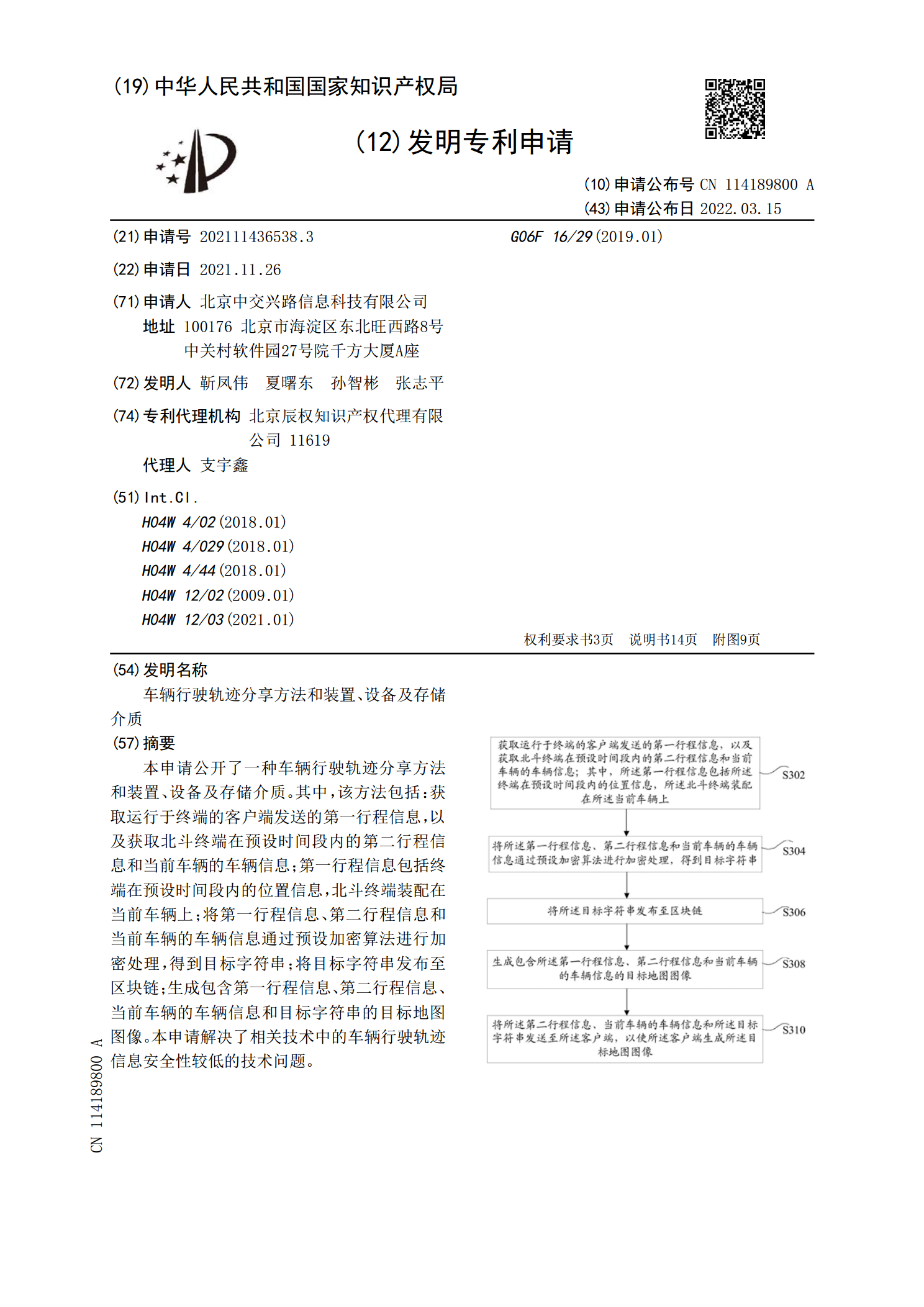
车辆行驶轨迹分享方法和装置、设备及存储介质.pdf
本申请公开了一种车辆行驶轨迹分享方法和装置、设备及存储介质。其中,该方法包括:获取运行于终端的客户端发送的第一行程信息,以及获取北斗终端在预设时间段内的第二行程信息和当前车辆的车辆信息;第一行程信息包括终端在预设时间段内的位置信息,北斗终端装配在当前车辆上;将第一行程信息、第二行程信息和当前车辆的车辆信息通过预设加密算法进行加密处理,得到目标字符串;将目标字符串发布至区块链;生成包含第一行程信息、第二行程信息、当前车辆的车辆信息和目标字符串的目标地图图像。本申请解决了相关技术中的车辆行驶轨迹信息安全性较低