
激光雷达点云的投影方法、装置、设备及存储介质.pdf

念珊****写意

1/10
2/10
3/10
4/10
5/10
6/10
7/10
8/10
9/10
10/10
亲,该文档总共19页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
激光雷达点云的投影方法、装置、设备及存储介质.pdf
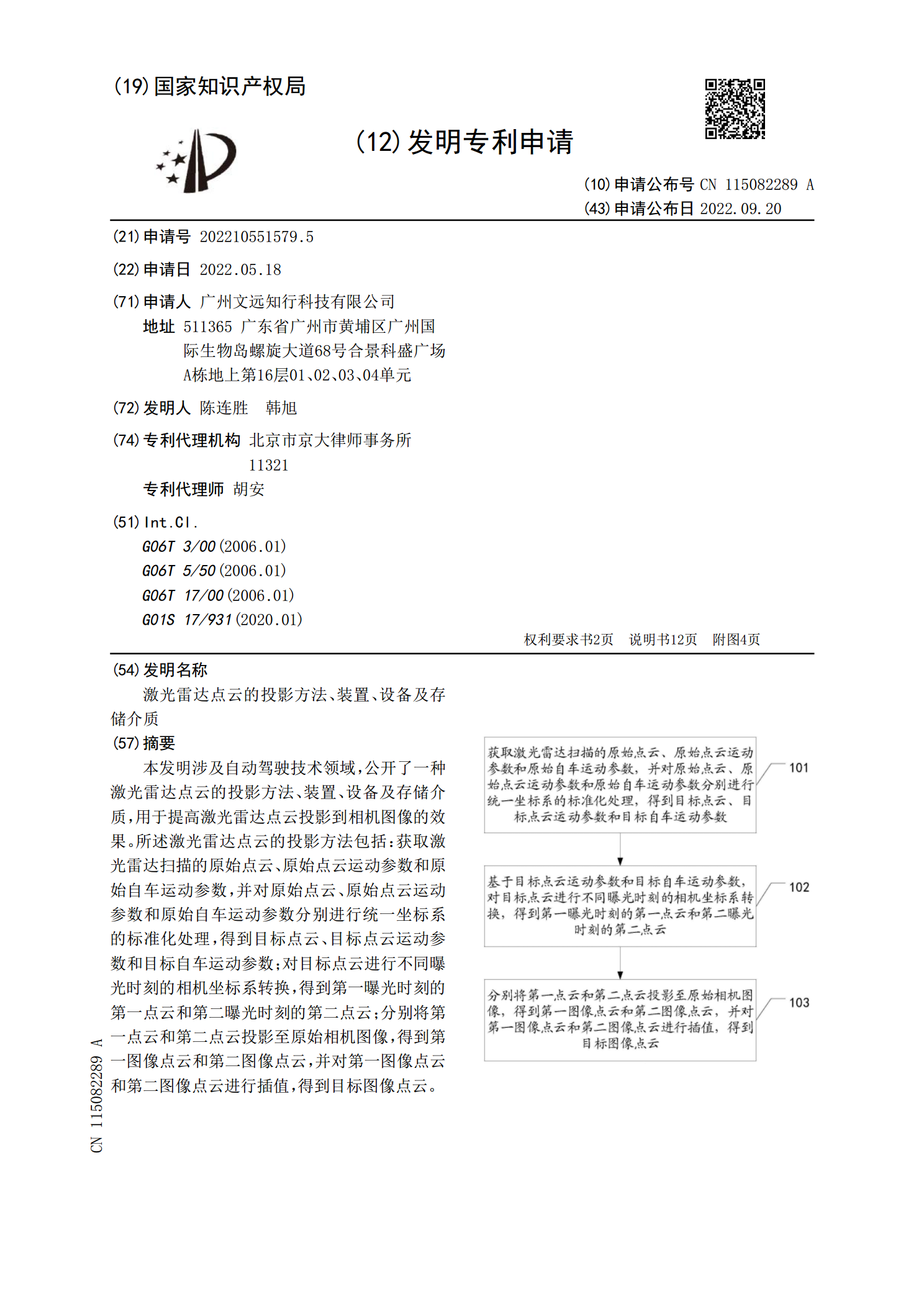
本发明涉及自动驾驶技术领域,公开了一种激光雷达点云的投影方法、装置、设备及存储介质,用于提高激光雷达点云投影到相机图像的效果。所述激光雷达点云的投影方法包括:获取激光雷达扫描的原始点云、原始点云运动参数和原始自车运动参数,并对原始点云、原始点云运动参数和原始自车运动参数分别进行统一坐标系的标准化处理,得到目标点云、目标点云运动参数和目标自车运动参数;对目标点云进行不同曝光时刻的相机坐标系转换,得到第一曝光时刻的第一点云和第二曝光时刻的第二点云;分别将第一点云和第二点云投影至原始相机图像,得到第一图像点云和

激光雷达点云的投影方法、装置、设备及存储介质.pdf
本发明涉及自动驾驶技术领域,公开了一种激光雷达点云的投影方法、装置、设备及存储介质,用于提高激光雷达与相机信息融合的准确度。所述激光雷达点云的投影方法包括:获取激光雷达扫描的原始点云,并对原始点云进行运动畸变去除,得到第一点云;基于原始相机图像的目标曝光时刻,将第一点云转换至相机坐标系,得到第二点云;对第二点云进行相机运动畸变添加,得到目标点云,并将目标点云投影至原始相机图像。

用于激光雷达的点云处理方法及装置、存储介质.pdf
本申请公开了一种用于激光雷达的点云处理方法及装置、存储介质,所述方法包括:根据预设的角度范围以及分辨率,将激光雷达的点云划分为不同的栅格;遍历每个栅格内的所有点,获取栅格内最近点以及最远点,计算所述最远点和所述最近点的距离差值,在所述距离差值大于设定阈值的情况下,进行粘连点处理;所述粘连点处理包括:保留栅格内最近点以及最远点的一定距离范围内的点,将其余的点确定为粘连点;将所述粘连点删除。本申请处理后的点云数据更合理,能准确对障碍物进行避让,大大方便了自动驾驶中的路径规划,保证了行车安全。

用于激光雷达的点云处理方法及装置、存储介质.pdf
本申请公开了一种用于激光雷达的点云处理方法及装置、存储介质,所述方法包括:根据预设的角度范围以及分辨率,将激光雷达的点云划分为不同的栅格;遍历每个栅格内的所有点,获取栅格内最近点以及最远点,进行粘连点处理;所述粘连点处理包括:保留栅格内最近点以及最远点的一定距离范围内的点,将其余的点确定为粘连点;将所述粘连点删除。本申请处理后的点云数据更合理,能准确对障碍物进行避让,大大方便了自动驾驶中的路径规划,保证了行车安全。
点云存储方法、装置、设备及存储介质.pdf
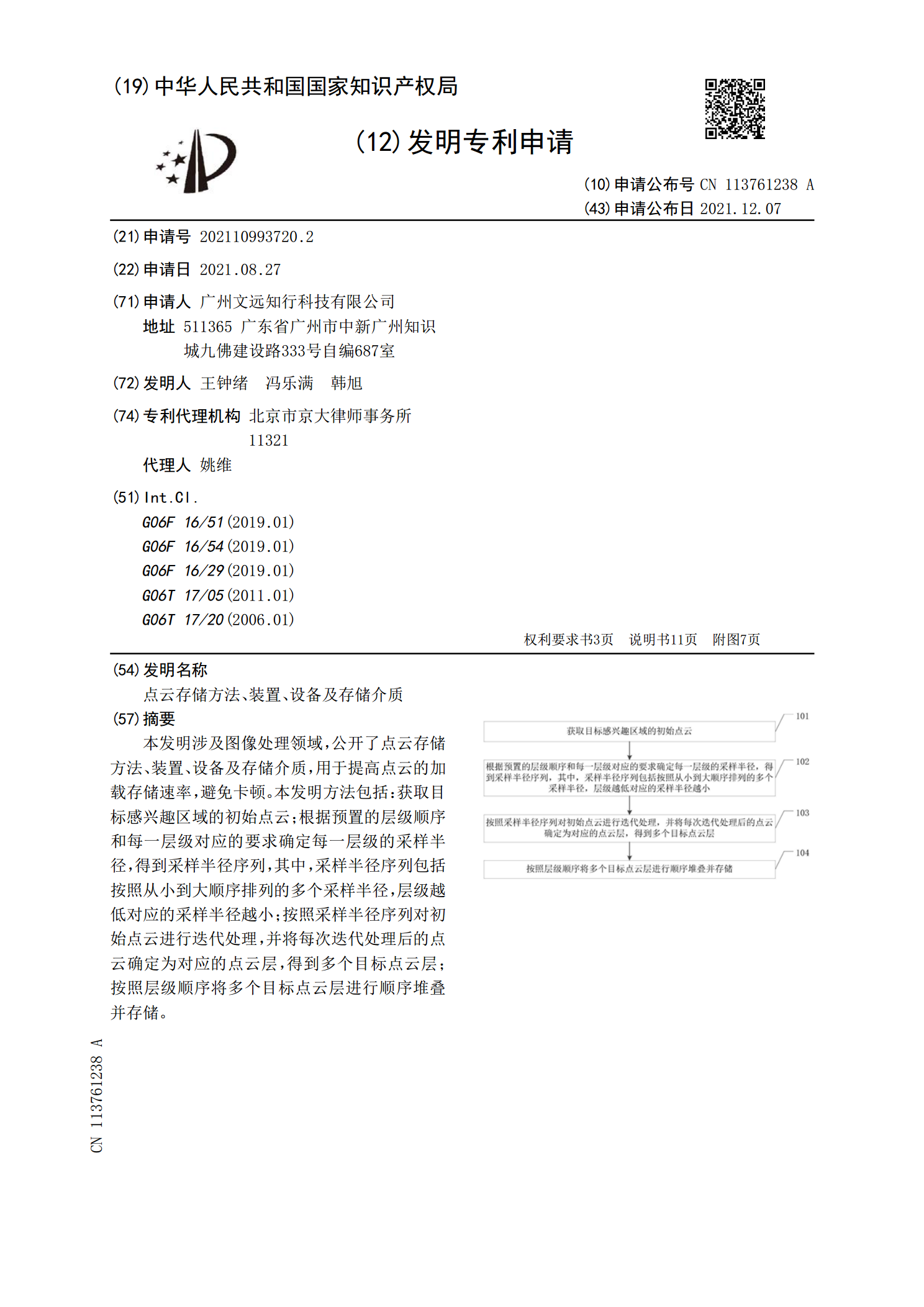
本发明涉及图像处理领域,公开了点云存储方法、装置、设备及存储介质,用于提高点云的加载存储速率,避免卡顿。本发明方法包括:获取目标感兴趣区域的初始点云;根据预置的层级顺序和每一层级对应的要求确定每一层级的采样半径,得到采样半径序列,其中,采样半径序列包括按照从小到大顺序排列的多个采样半径,层级越低对应的采样半径越小;按照采样半径序列对初始点云进行迭代处理,并将每次迭代处理后的点云确定为对应的点云层,得到多个目标点云层;按照层级顺序将多个目标点云层进行顺序堆叠并存储。