
积水深度检测方法及装置.pdf

飞飙****ng

1/10

2/10

3/10

4/10
5/10
6/10

7/10

8/10

9/10
10/10
亲,该文档总共46页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
积水深度检测方法及装置.pdf
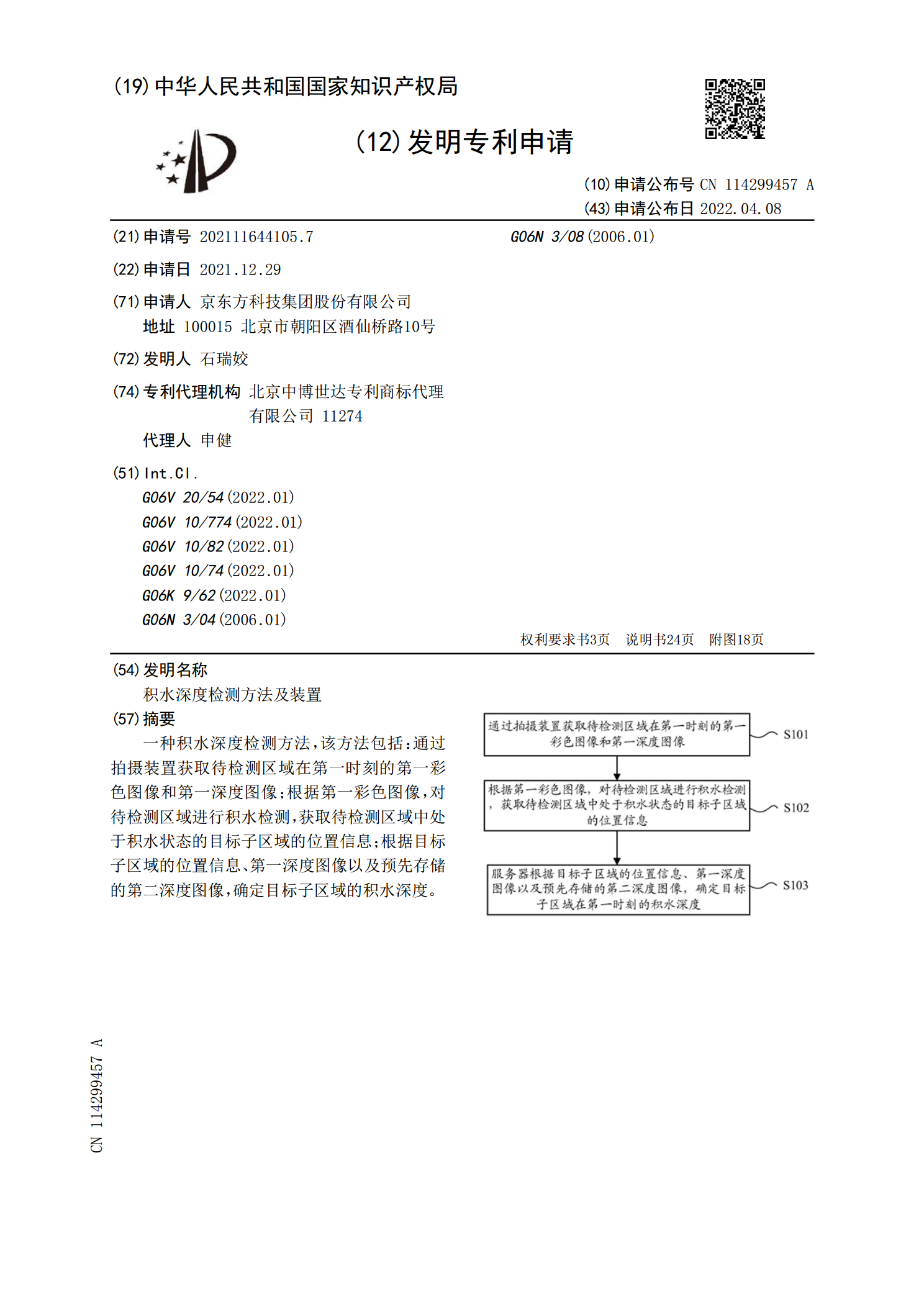
一种积水深度检测方法,该方法包括:通过拍摄装置获取待检测区域在第一时刻的第一彩色图像和第一深度图像;根据第一彩色图像,对待检测区域进行积水检测,获取待检测区域中处于积水状态的目标子区域的位置信息;根据目标子区域的位置信息、第一深度图像以及预先存储的第二深度图像,确定目标子区域的积水深度。
积水检测器、管道内积水的检测方法及装置.pdf
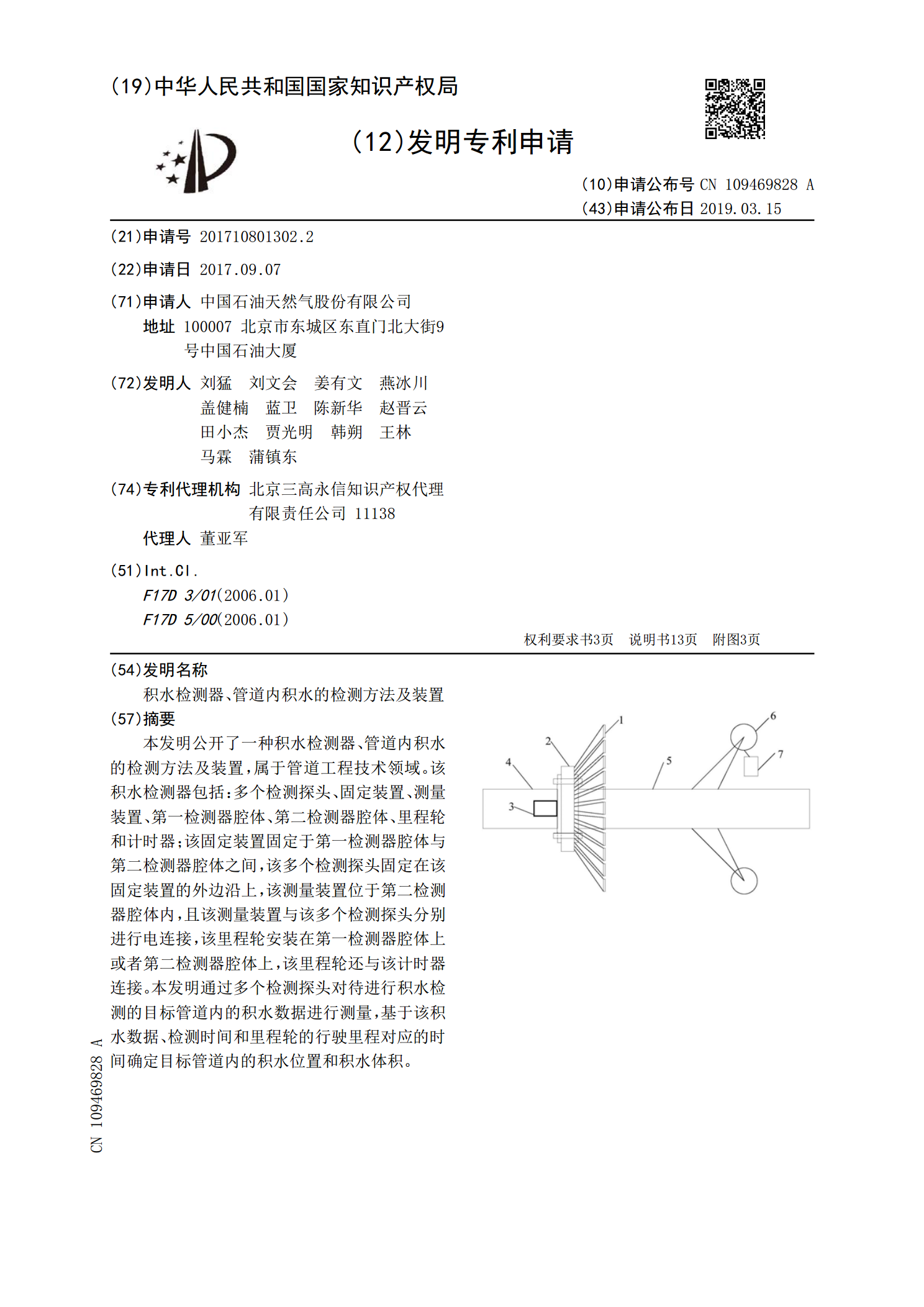
本发明公开了一种积水检测器、管道内积水的检测方法及装置,属于管道工程技术领域。该积水检测器包括:多个检测探头、固定装置、测量装置、第一检测器腔体、第二检测器腔体、里程轮和计时器;该固定装置固定于第一检测器腔体与第二检测器腔体之间,该多个检测探头固定在该固定装置的外边沿上,该测量装置位于第二检测器腔体内,且该测量装置与该多个检测探头分别进行电连接,该里程轮安装在第一检测器腔体上或者第二检测器腔体上,该里程轮还与该计时器连接。本发明通过多个检测探头对待进行积水检测的目标管道内的积水数据进行测量,基于该积水数据
路面积水深度的检测方法、装置和存储介质.pdf
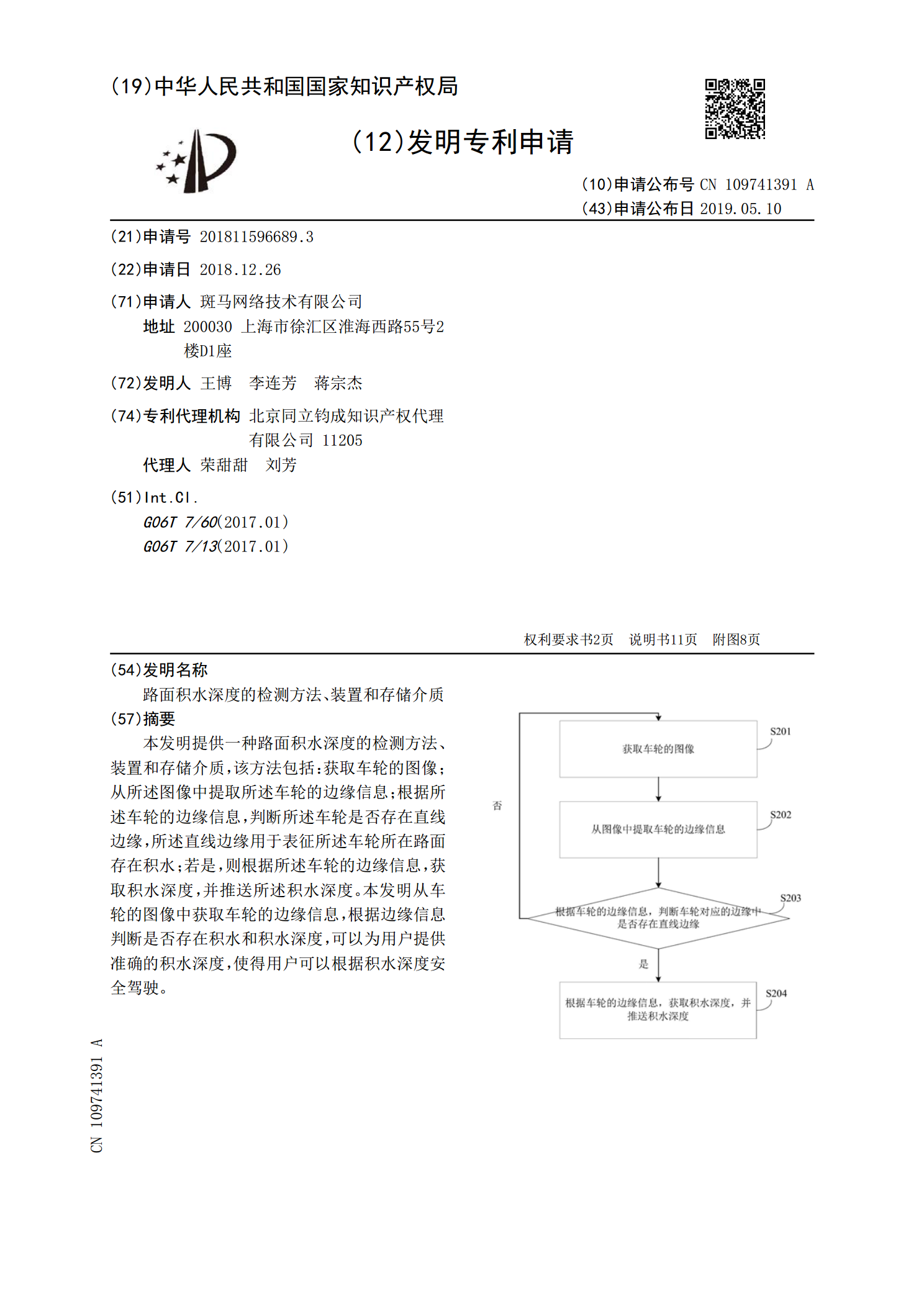
本发明提供一种路面积水深度的检测方法、装置和存储介质,该方法包括:获取车轮的图像;从所述图像中提取所述车轮的边缘信息;根据所述车轮的边缘信息,判断所述车轮是否存在直线边缘,所述直线边缘用于表征所述车轮所在路面存在积水;若是,则根据所述车轮的边缘信息,获取积水深度,并推送所述积水深度。本发明从车轮的图像中获取车轮的边缘信息,根据边缘信息判断是否存在积水和积水深度,可以为用户提供准确的积水深度,使得用户可以根据积水深度安全驾驶。
路面积水检测方法及装置.pdf
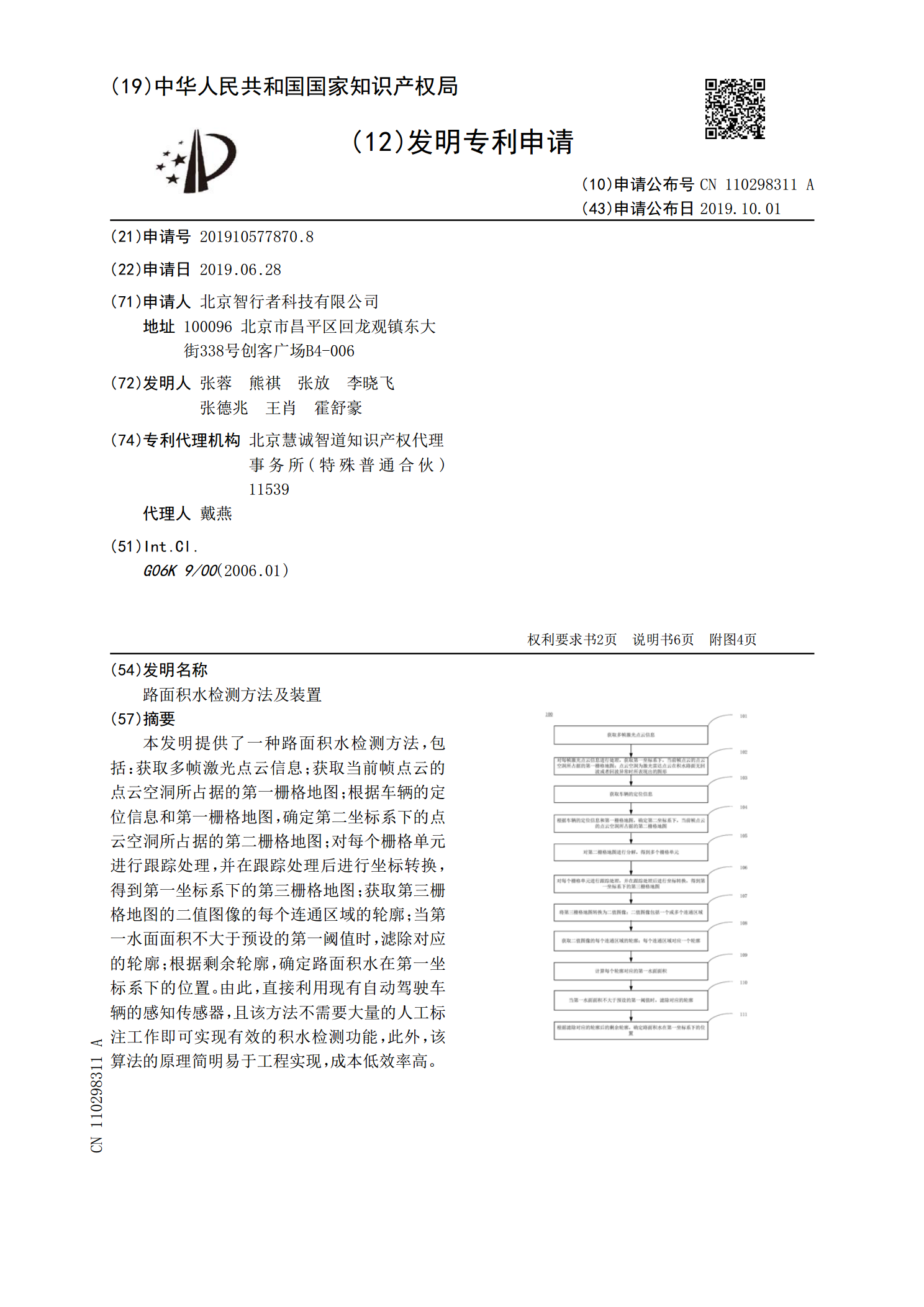
本发明提供了一种路面积水检测方法,包括:获取多帧激光点云信息;获取当前帧点云的点云空洞所占据的第一栅格地图;根据车辆的定位信息和第一栅格地图,确定第二坐标系下的点云空洞所占据的第二栅格地图;对每个栅格单元进行跟踪处理,并在跟踪处理后进行坐标转换,得到第一坐标系下的第三栅格地图;获取第三栅格地图的二值图像的每个连通区域的轮廓;当第一水面面积不大于预设的第一阈值时,滤除对应的轮廓;根据剩余轮廓,确定路面积水在第一坐标系下的位置。由此,直接利用现有自动驾驶车辆的感知传感器,且该方法不需要大量的人工标注工作即可实

用于车辆的估算积水深度的方法、装置以及车辆.pdf
本发明公开了一种用于车辆的估算积水深度的方法、装置以及车辆。所述方法包括:获取车辆前轮图像;根据所述车辆前轮图像,通过判断水面与前轮的位置关系计算积水深度。本公开通过获取车辆在当前行驶道路上的前轮图像,对所述前轮图像进行分析和计算得出当前行驶道路的积水深度,从而解决现有技术中对道路积水深度估算的准确率较低、实时性较差的问题,为用户出行提供可靠的支持。