
吸附式自移动装置.pdf

哲妍****彩妍


1/8

2/8
3/8

4/8

5/8

6/8

7/8

8/8
在线预览结束,喜欢就下载吧,查找使用更方便
相关资料

吸附式自移动装置.pdf
一种吸附式自移动装置,包括机体(1),机体设有吸盘(2)、驱动单元和控制单元,吸盘设置在机体底部,驱动单元在控制单元控制下驱动机体在作业面上移动,所述吸附式自移动装置包括弹性支撑轮组件(3),该组件设置在机体底部;所述吸附式自移动装置还包括摩擦垫(4),所述摩擦垫能够随着吸盘放气而与作业面紧压,从而增大机体与作业面之间的摩擦力;当吸盘处于负压吸附状态时,所述弹性支撑轮组件处于压紧收缩的第一工作位置;当吸盘处于泄气状态时,所述弹性支撑轮组件处于伸展的第二工作位置,摩擦垫脱离作业面。本发明支撑轮能减小吸盘与作
自移动装置.pdf
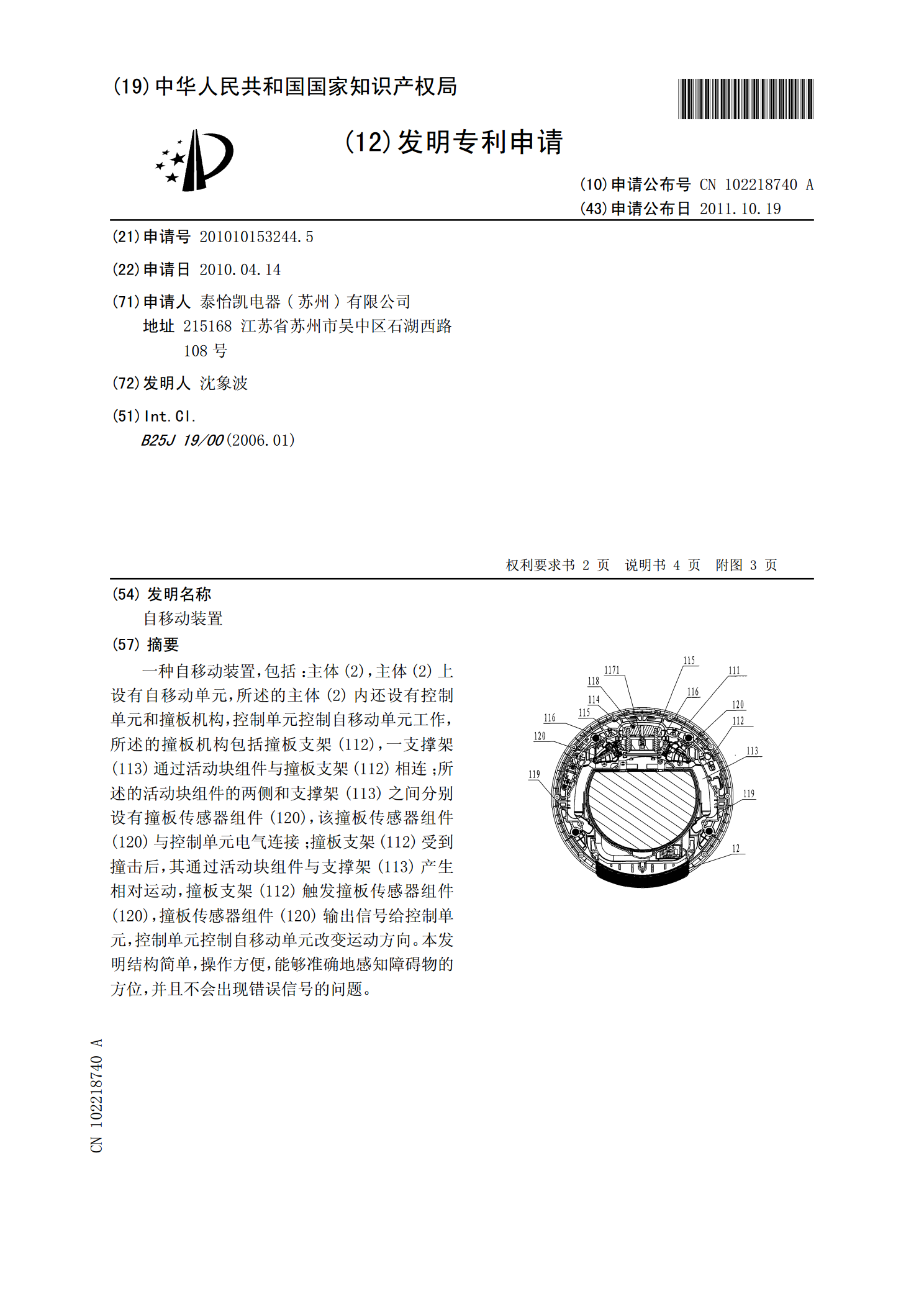
一种自移动装置,包括:主体(2),主体(2)上设有自移动单元,所述的主体(2)内还设有控制单元和撞板机构,控制单元控制自移动单元工作,所述的撞板机构包括撞板支架(112),一支撑架(113)通过活动块组件与撞板支架(112)相连;所述的活动块组件的两侧和支撑架(113)之间分别设有撞板传感器组件(120),该撞板传感器组件(120)与控制单元电气连接;撞板支架(112)受到撞击后,其通过活动块组件与支撑架(113)产生相对运动,撞板支架(112)触发撞板传感器组件(120),撞板传感器组件(120)输出信
自移动装置控制方法、装置、系统、介质及自移动装置.pdf
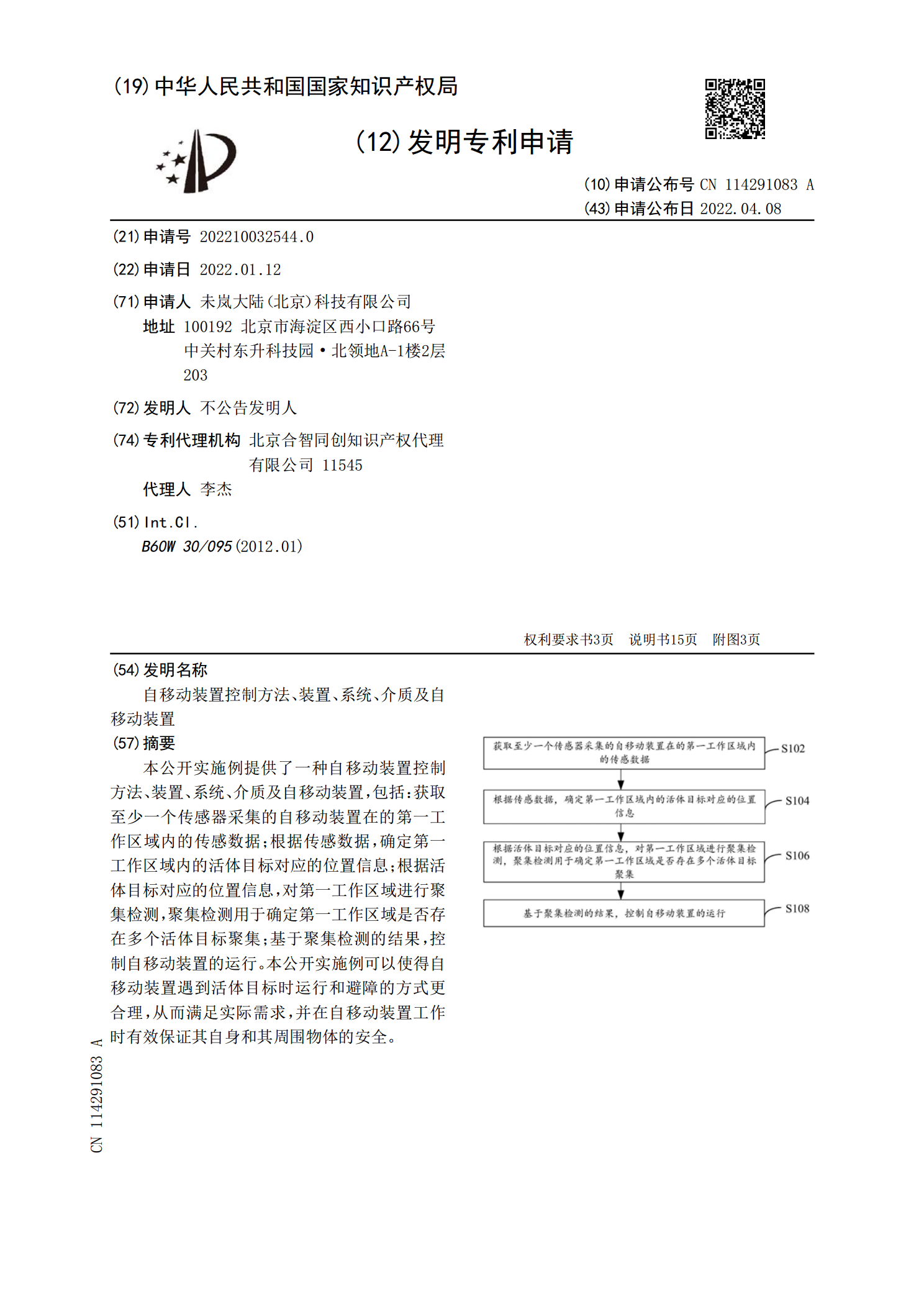
本公开实施例提供了一种自移动装置控制方法、装置、系统、介质及自移动装置,包括:获取至少一个传感器采集的自移动装置在的第一工作区域内的传感数据;根据传感数据,确定第一工作区域内的活体目标对应的位置信息;根据活体目标对应的位置信息,对第一工作区域进行聚集检测,聚集检测用于确定第一工作区域是否存在多个活体目标聚集;基于聚集检测的结果,控制自移动装置的运行。本公开实施例可以使得自移动装置遇到活体目标时运行和避障的方式更合理,从而满足实际需求,并在自移动装置工作时有效保证其自身和其周围物体的安全。
真空自吸附式隔热降噪强化塑料平板.pdf
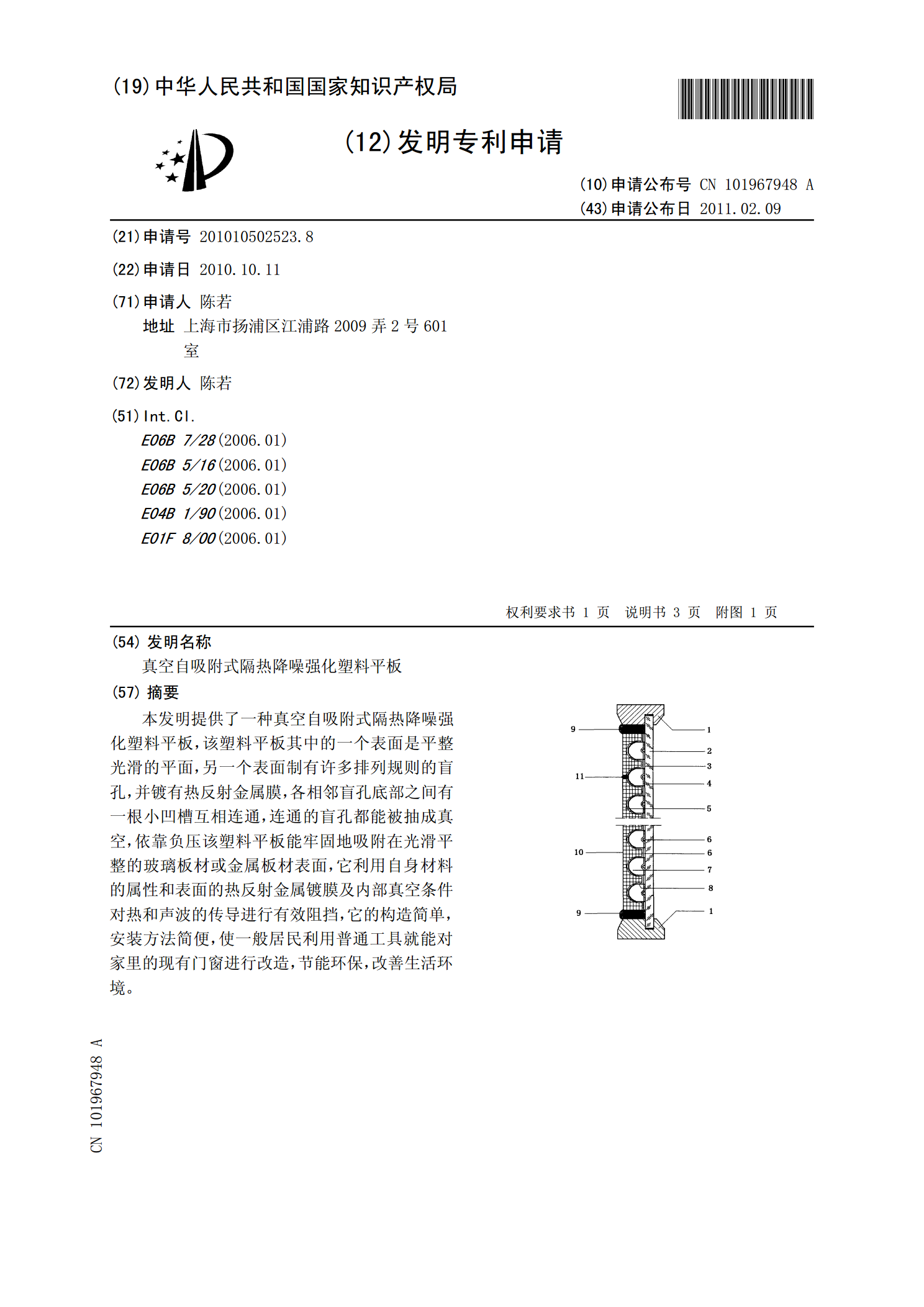
本发明提供了一种真空自吸附式隔热降噪强化塑料平板,该塑料平板其中的一个表面是平整光滑的平面,另一个表面制有许多排列规则的盲孔,并镀有热反射金属膜,各相邻盲孔底部之间有一根小凹槽互相连通,连通的盲孔都能被抽成真空,依靠负压该塑料平板能牢固地吸附在光滑平整的玻璃板材或金属板材表面,它利用自身材料的属性和表面的热反射金属镀膜及内部真空条件对热和声波的传导进行有效阻挡,它的构造简单,安装方法简便,使一般居民利用普通工具就能对家里的现有门窗进行改造,节能环保,改善生活环境。
信息处理系统以及自走式移动装置.pdf
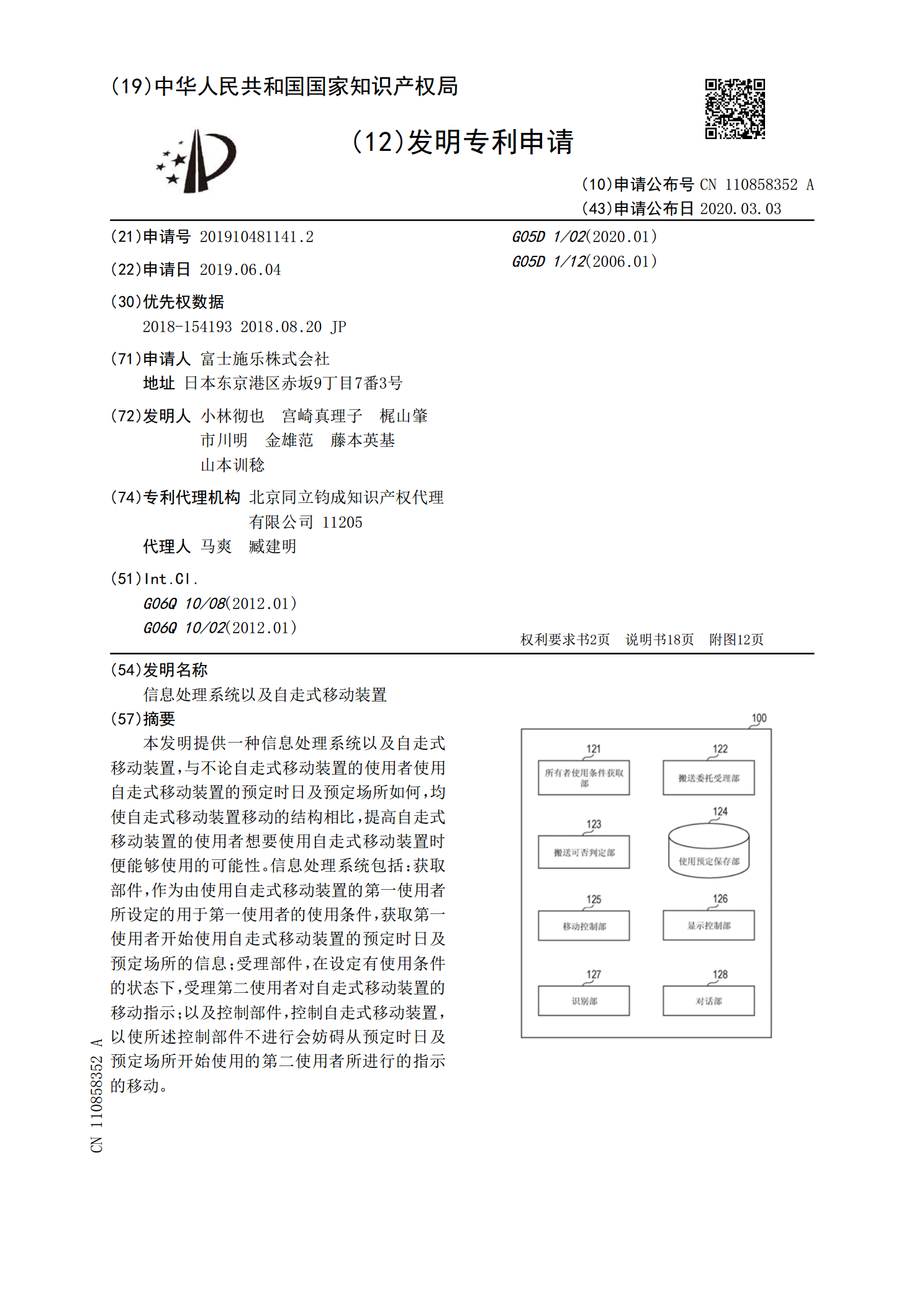
本发明提供一种信息处理系统以及自走式移动装置,与不论自走式移动装置的使用者使用自走式移动装置的预定时日及预定场所如何,均使自走式移动装置移动的结构相比,提高自走式移动装置的使用者想要使用自走式移动装置时便能够使用的可能性。信息处理系统包括:获取部件,作为由使用自走式移动装置的第一使用者所设定的用于第一使用者的使用条件,获取第一使用者开始使用自走式移动装置的预定时日及预定场所的信息;受理部件,在设定有使用条件的状态下,受理第二使用者对自走式移动装置的移动指示;以及控制部件,控制自走式移动装置,以使所述控制部