
透明A柱的实现方法、装置、汽车及介质.pdf

是来****文章

1/10

2/10

3/10
4/10

5/10

6/10
7/10

8/10

9/10
10/10
亲,该文档总共23页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料

透明A柱的实现方法、装置、汽车及介质.pdf
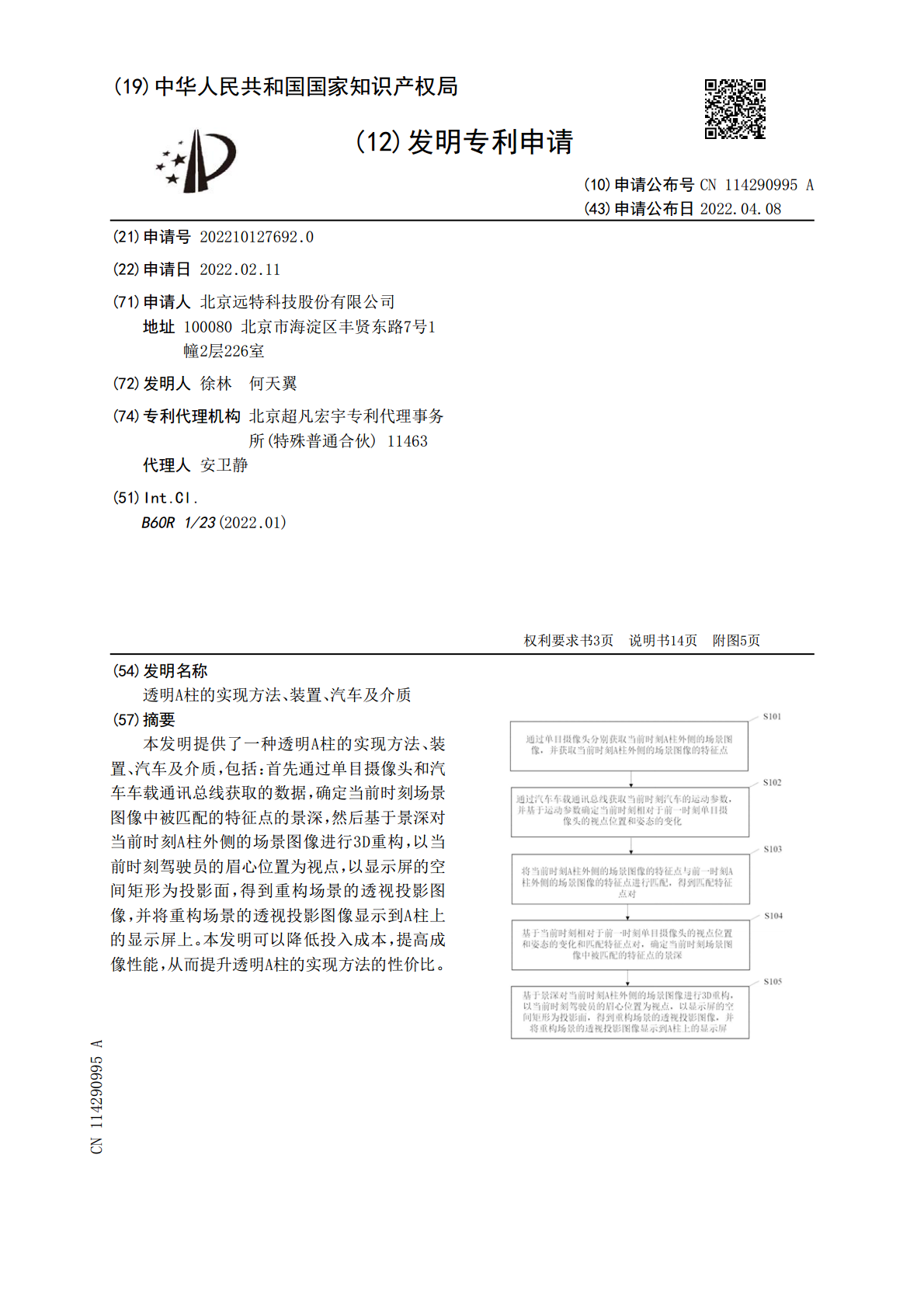
本发明提供了一种透明A柱的实现方法、装置、汽车及介质,包括:首先通过单目摄像头和汽车车载通讯总线获取的数据,确定当前时刻场景图像中被匹配的特征点的景深,然后基于景深对当前时刻A柱外侧的场景图像进行3D重构,以当前时刻驾驶员的眉心位置为视点,以显示屏的空间矩形为投影面,得到重构场景的透视投影图像,并将重构场景的透视投影图像显示到A柱上的显示屏上。本发明可以降低投入成本,提高成像性能,从而提升透明A柱的实现方法的性价比。
一种实现汽车A柱视野透明的方法及其系统装置.pdf
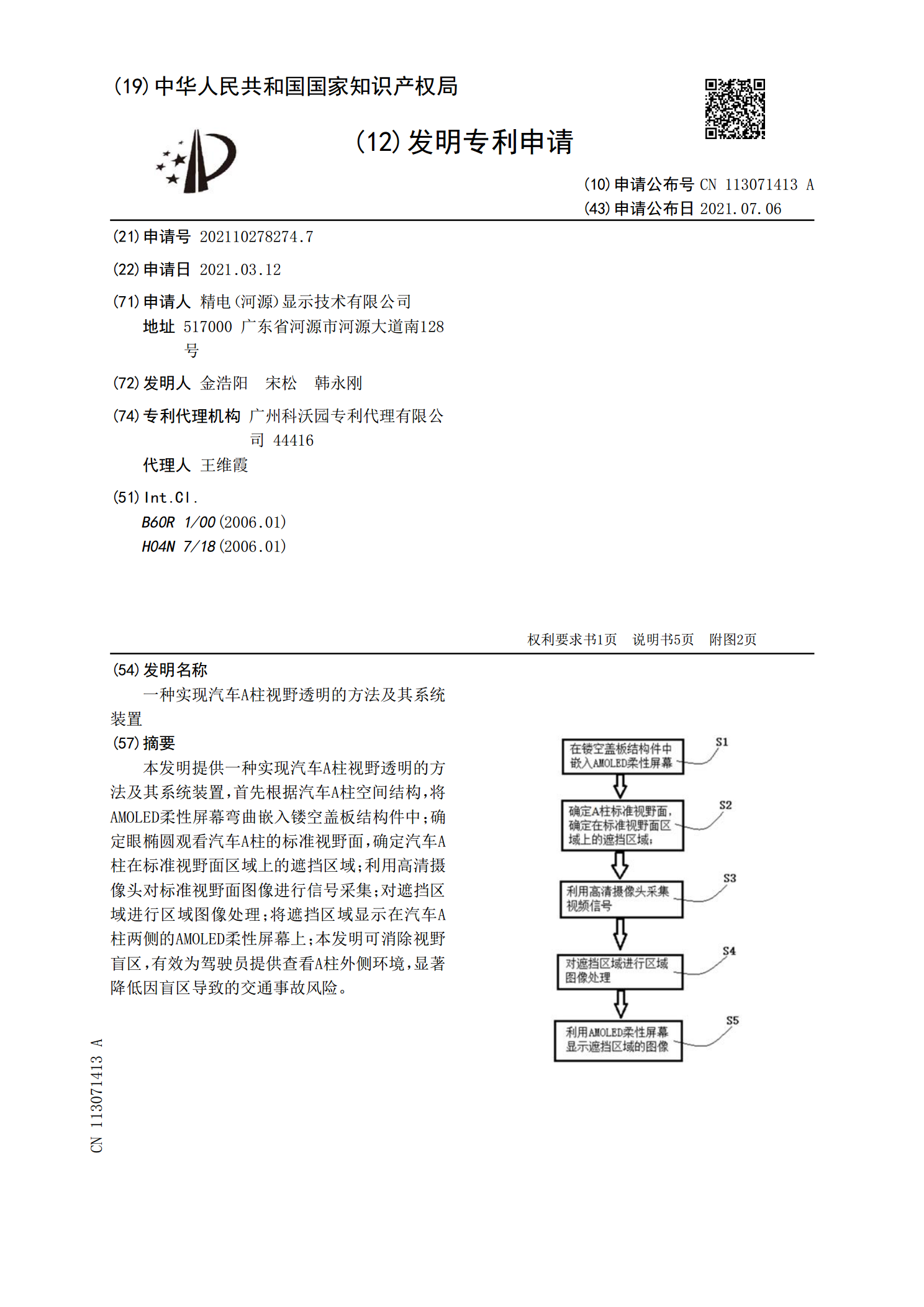
本发明提供一种实现汽车A柱视野透明的方法及其系统装置,首先根据汽车A柱空间结构,将AMOLED柔性屏幕弯曲嵌入镂空盖板结构件中;确定眼椭圆观看汽车A柱的标准视野面,确定汽车A柱在标准视野面区域上的遮挡区域;利用高清摄像头对标准视野面图像进行信号采集;对遮挡区域进行区域图像处理;将遮挡区域显示在汽车A柱两侧的AMOLED柔性屏幕上;本发明可消除视野盲区,有效为驾驶员提供查看A柱外侧环境,显著降低因盲区导致的交通事故风险。
一种车辆透明A柱显示方法、装置、车辆和可读存储介质.pdf
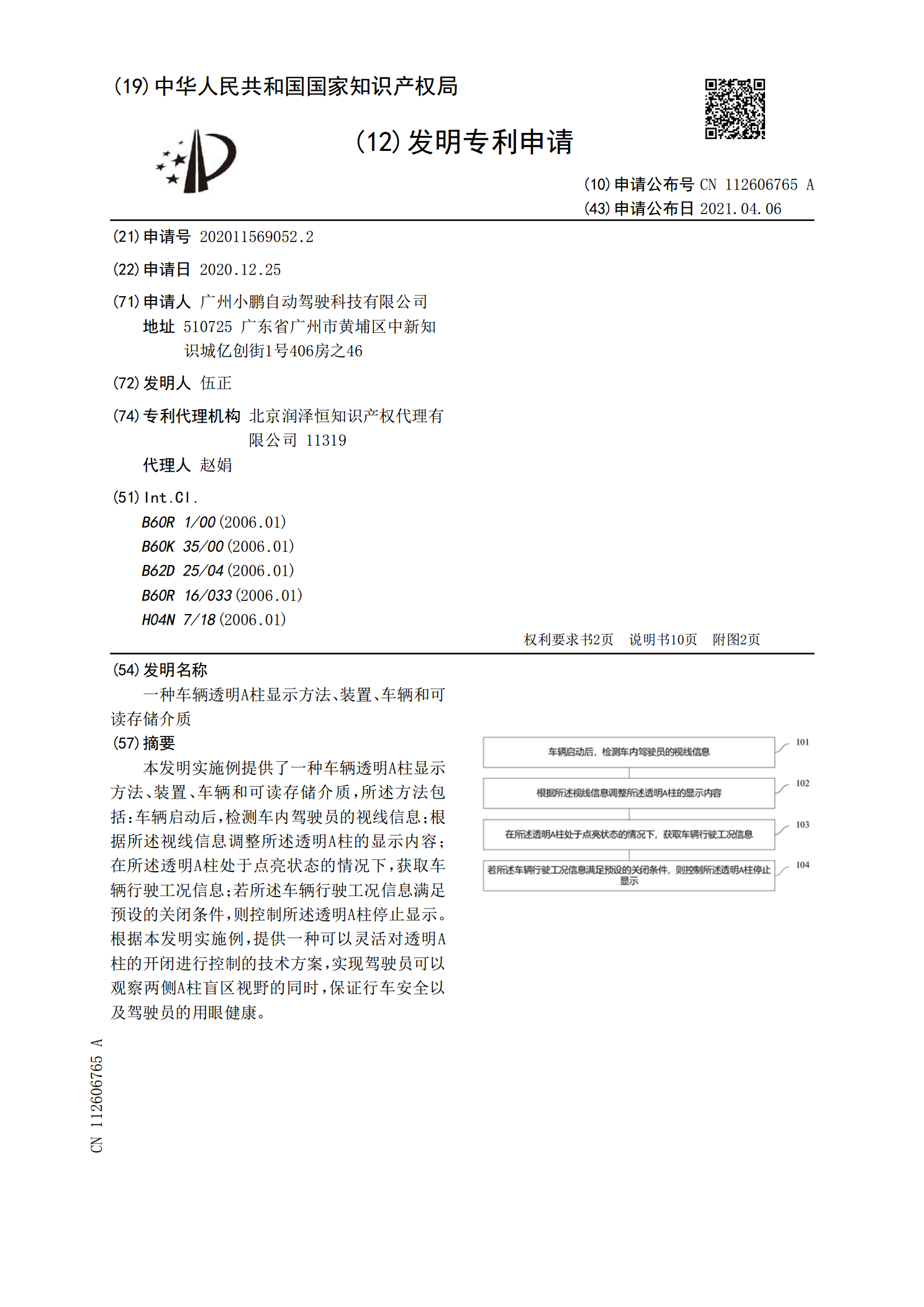
本发明实施例提供了一种车辆透明A柱显示方法、装置、车辆和可读存储介质,所述方法包括:车辆启动后,检测车内驾驶员的视线信息;根据所述视线信息调整所述透明A柱的显示内容;在所述透明A柱处于点亮状态的情况下,获取车辆行驶工况信息;若所述车辆行驶工况信息满足预设的关闭条件,则控制所述透明A柱停止显示。根据本发明实施例,提供一种可以灵活对透明A柱的开闭进行控制的技术方案,实现驾驶员可以观察两侧A柱盲区视野的同时,保证行车安全以及驾驶员的用眼健康。

资源池中多个透明桥的实现方法、装置、设备和介质.pdf
本公开涉及一种资源池中多个透明桥的实现方法、装置、设备和介质;对接收到的业务流量数据包增加对应的标签,得到目标数据包,其中,标签中包括业务流量数据包对应的透明桥的标识信息;通过第一接口将目标数据包发送至SDN桥,以使SDN桥将目标数据包传输至服务链,接收从服务链中传出的目标数据包,并根据目标数据包中的标签确定对应的透明桥的第二接口;通过第二接口接收目标数据包,并将目标数据包转发至对应的物理端口,以供物理端口将目标数据包传输至对应的目标端。本公开实施例通过为业务流量数据包增加标签,从而能够区分出业务流量数据
基于透明A柱的盲区显示方法及装置.pdf
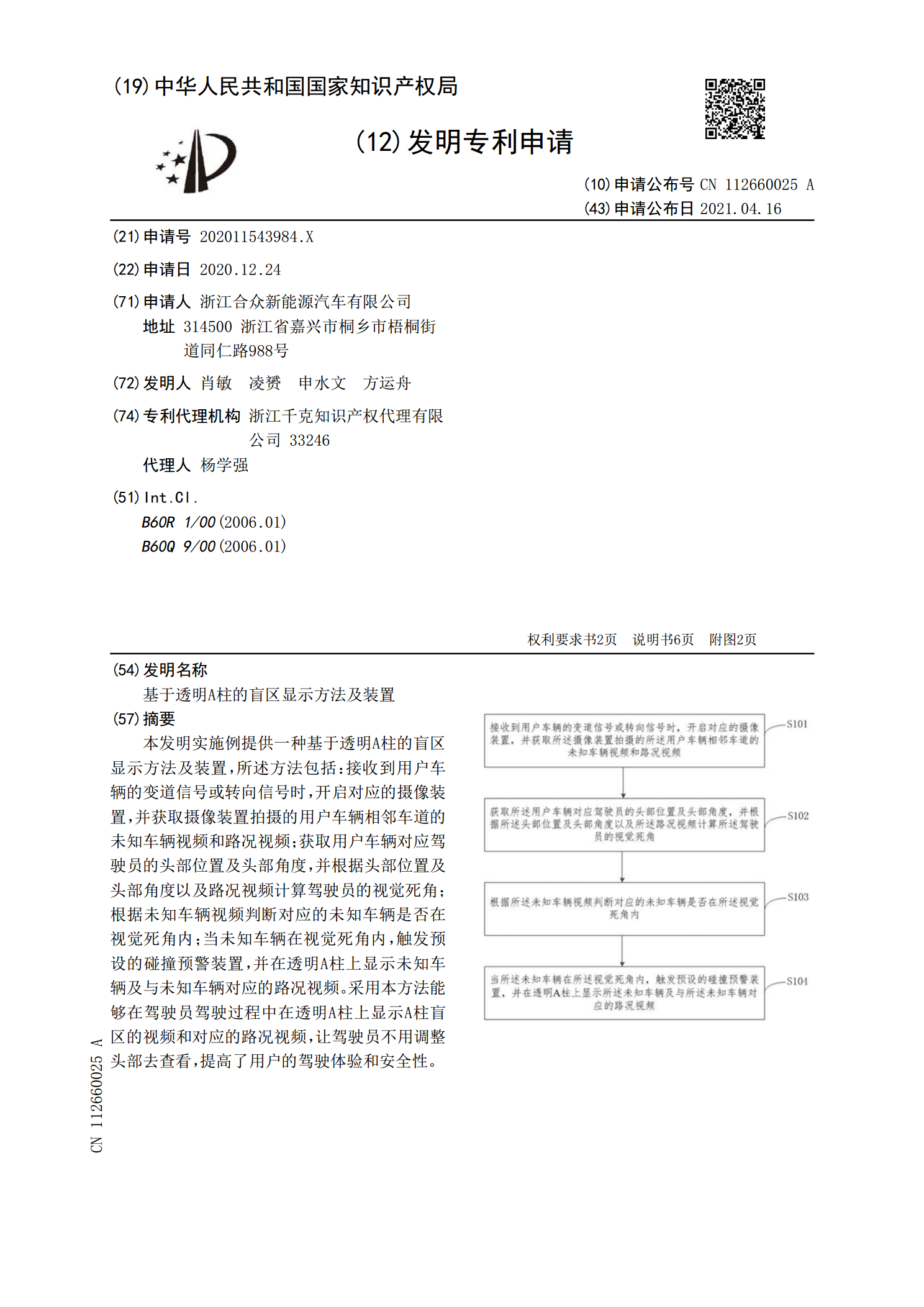
本发明实施例提供一种基于透明A柱的盲区显示方法及装置,所述方法包括:接收到用户车辆的变道信号或转向信号时,开启对应的摄像装置,并获取摄像装置拍摄的用户车辆相邻车道的未知车辆视频和路况视频;获取用户车辆对应驾驶员的头部位置及头部角度,并根据头部位置及头部角度以及路况视频计算驾驶员的视觉死角;根据未知车辆视频判断对应的未知车辆是否在视觉死角内;当未知车辆在视觉死角内,触发预设的碰撞预警装置,并在透明A柱上显示未知车辆及与未知车辆对应的路况视频。采用本方法能够在驾驶员驾驶过程中在透明A柱上显示A柱盲区的视频和对