
基于目标跟踪的相控阵雷达波束和驻留时间联合分配方法.pdf

骊蓉****23

1/10

2/10

3/10

4/10
5/10
6/10

7/10

8/10

9/10

10/10
亲,该文档总共18页,到这已经超出免费预览范围,如果喜欢就直接下载吧~
相关资料
基于目标跟踪的相控阵雷达波束和驻留时间联合分配方法.pdf
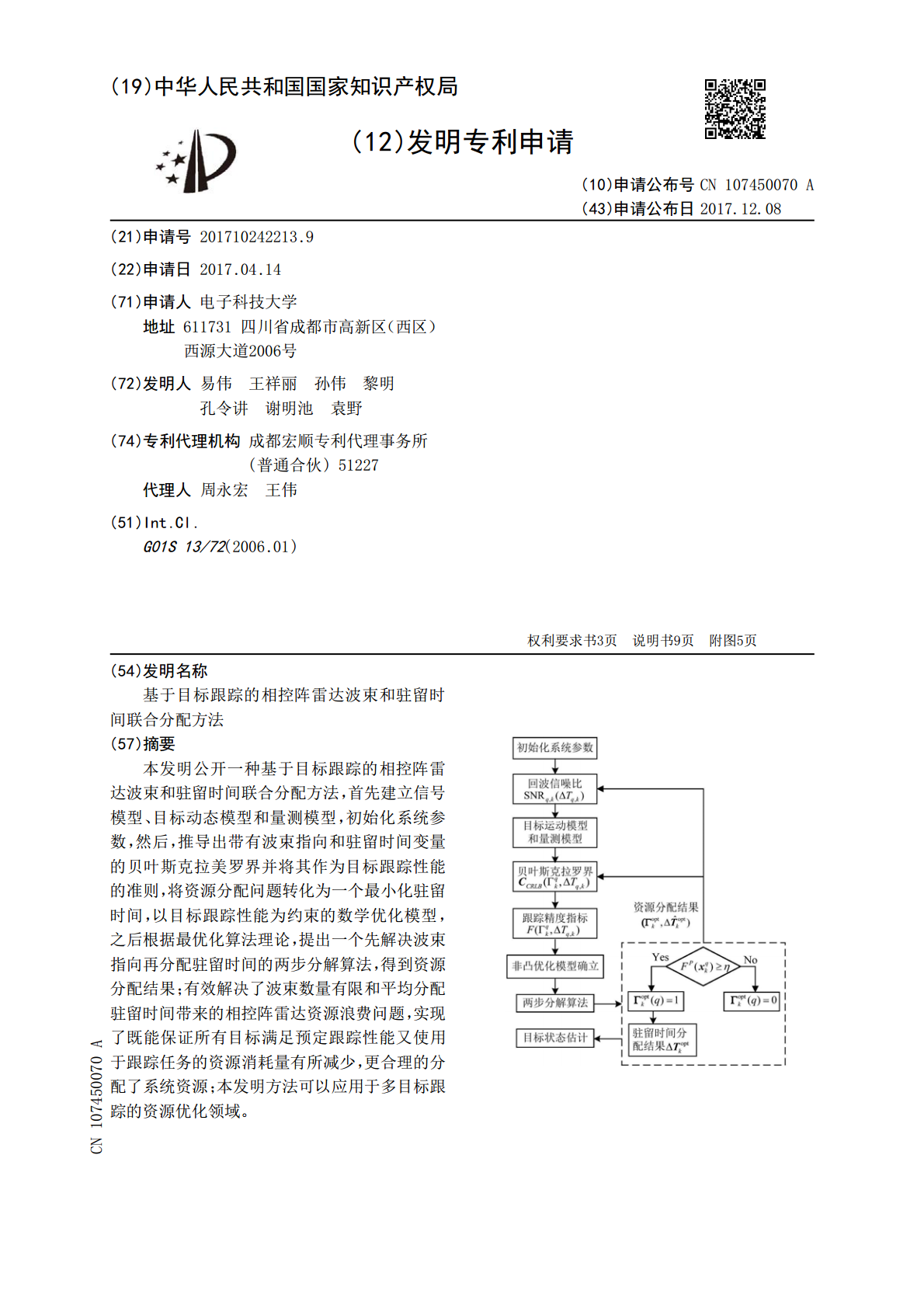
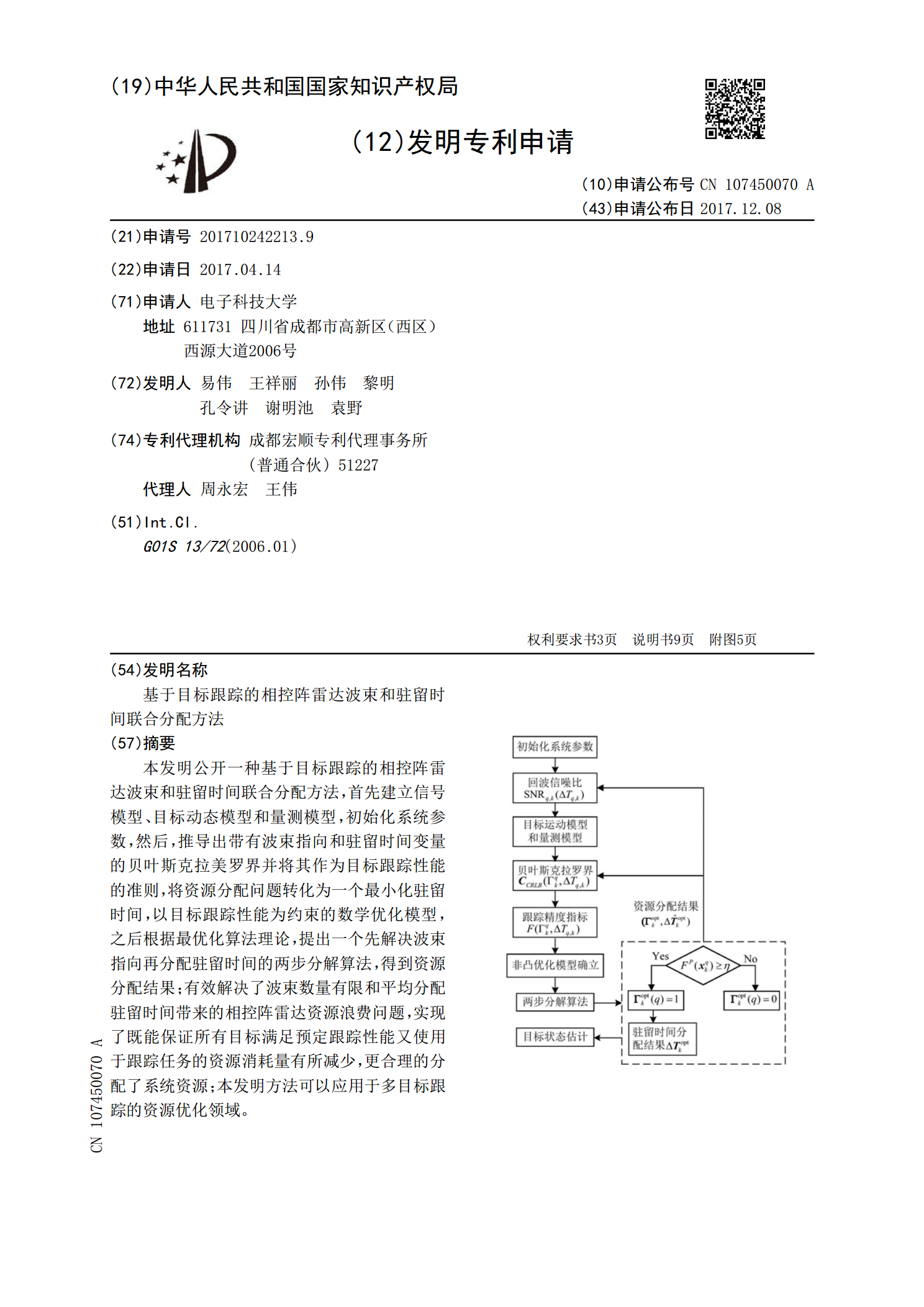
本发明公开一种基于目标跟踪的相控阵雷达波束和驻留时间联合分配方法,首先建立信号模型、目标动态模型和量测模型,初始化系统参数,然后,推导出带有波束指向和驻留时间变量的贝叶斯克拉美罗界并将其作为目标跟踪性能的准则,将资源分配问题转化为一个最小化驻留时间,以目标跟踪性能为约束的数学优化模型,之后根据最优化算法理论,提出一个先解决波束指向再分配驻留时间的两步分解算法,得到资源分配结果;有效解决了波束数量有限和平均分配驻留时间带来的相控阵雷达资源浪费问题,实现了既能保证所有目标满足预定跟踪性能又使用于跟踪任务的资源

一种基于双时间指针的实时相控阵雷达波束驻留调度方法.pdf
本发明属于雷达系统资源管理领域,特别涉及一种新型的相控阵雷达实时自适应驻留调度方法。本发明首先在调度间隔内设置分离点,在分离点左右两侧执行任务时分别采用基于时间指针的波束驻留调度方法,构成了基于双时间指针调度方式。随后,在综合优先级设计中,利用任务工作方式优先级分别与截止期或最早可执行时刻相结合构建一级综合优先级,再和期望执行时刻与实际执行时刻的偏差共同构建二级综合优先级。最终,在不同分离点情况下获得的波束驻留调度序列中,选择代价最小的任务调度序列作为最终调度结果。仿真结果表明,与现有方法相比,此方法兼顾

基于预测贝叶斯克拉美罗界的相控阵雷达重返和驻留时间分配方法.pdf
本发明公开了一种基于预测贝叶斯克拉美罗界的相控阵雷达重返和驻留时间分配方法。本发明引入后验克拉美罗界作为跟踪性能的准则,首先确立一个以跟踪精度为约束来最小化跟踪资源负载的数学优化模型,然后根据最优化理论,提出了一种转化方法实现了重返和驻留时间的控制。本发明的实施,有效解决雷达波束重返时间和驻留时间分配不合理造成的资源负载过大的技术问题,从而实现了在完成对目标有效跟踪的同时消耗更少的系统资源。

基于射频隐身的组网雷达多目标跟踪驻留时间优化方法.pdf
本发明公开了一种基于射频隐身的组网雷达多目标跟踪驻留时间优化方法,构建了以雷达二元选择变量、雷达驻留时间和发射信号带宽为自变量的目标状态估计误差的贝叶斯克拉美‑罗下界,并将其作为目标跟踪精度的衡量指标;在此基础上,以下一时刻目标的预测跟踪精度、融合中心的数据处理量以及雷达发射资源为约束条件,以最小化组网雷达系统的总驻留时间为优化目标,对多目标跟踪过程中雷达选择、驻留时间和发射信号带宽等参数进行优化设计。这样既满足了多目标跟踪过程中各目标的跟踪精度,而且最大限度地减小了组网雷达系统的总驻留时间,提升了组网雷

一种基于序贯处理的实时相控阵雷达波束驻留调度方法.pdf
本发明属于雷达系统资源管理领域,特别涉及一种基于序贯处理的实时相控阵雷达波束驻留调度方法。本发明首先利用基于时间指针的波束驻留调度算法获得实际执行任务集合、延迟任务集合和删除任务集合,在此基础上对实际执行任务集合进行序贯处理,调整其实际调度执行时刻,从而在保证调度优先级和截止期的同时兼顾了期望执行时间准则。在序贯处理中,本发明通过遍历实际执行任务的全部可能执行顺序,获得了在启发式规则下具有最低的时间偏移率的实际执行任务队列,其中引入分支界定的思想降低了计算复杂度,从而保证了本调度方法的实时性。